

2.1.8 Регулирование координат эп с дпт нв изменением подводимого к якорю напряжения
Данный способ является в настоящее время наиболее эффективным и широко используемым. Обеспечивая большой диапазон регулирования скорости, этот способ является одновременно очень экономичным. По этой причине, этот способ является основным при создании автоматизированных ЭП постоянного тока.
Реализация этого способа предусматривает питание якоря ДПТ НВ от преобразователя, выходное напряжение которого регулируется по величине и может изменяться при необходимости по полярности. Поскольку основным источником питания ЭП служит сеть переменного тока, то таким преобразователем является управляемый выпрямитель (УВ). Схема ЭП при питании якоря двигателя от управляемого выпрямителя показана на рисунке 2.12,а.

Рисунок 2.12 – Регулирование скорости ДПТ НВ изменением подводимого к якорю напряжения а) Схема питания якоря ДПТ от управляемого выпрямителя б) Статические характеристики
Управляемый выпрямитель УВ характеризуется величиной ЭДС ЕП, а также внутренним сопротивлением RП.
Напряжение на выходе управляемого выпрямителя определяется выражением:
![]() (1)
(1)
Выражения электромеханической (2) и механической (3) характеристик ДПТ НВ при регулировании напряжения на якоре с помощью УВ получаем из математического выражения электромеханической и механической характеристик ДПТ НВ, путём подстановки в них формулы (1).
![]() (2)
(2)
 (3)
(3)
Статические характеристики системы «управляемый выпрямитель – двигатель»приведены на рисунке 2.12,б. Характеристика 1 является естественной, а остальные – искусственные. Естественная характеристика построена при питании якоря ДПТ НВ от источника с нулевым внутренним сопротивлением, поэтому она имеет меньший наклон по сравнению с искусственными характеристиками. При изменении ЕП пропорционально изменяется скорость идеального холостого хода ω0. Характеристики располагаются во всех четырёх квадрантах параллельно друг другу. При ЕП = 0 (характеристика 5) ДПТ работает в режиме динамического торможения.
Характеристики 2-8 построены соответственно при следующих значениях ЭДС управляемого выпрямителя.
Еп2 > Еп3 > Еп4; Еп5 = 0; Еп6 = – Еп4; Еп7 = –Еп3; Еп8 = – Еп2.
Управляемый выпрямитель обычно выполняется в виде электромашинной системы «генератор–двигатель» или системы «тиристорный преобразователь–двигатель».
2.1.9 Система «генератор – двигатель»
В этой системе якорь 4 двигателя непосредственно присоединен к якорю 3 генератора, который вместе с приводным двигателем 1 образует электромашинный выпрямитель 2 трехфазного переменного тока в постоянный (рисунок 2.13).
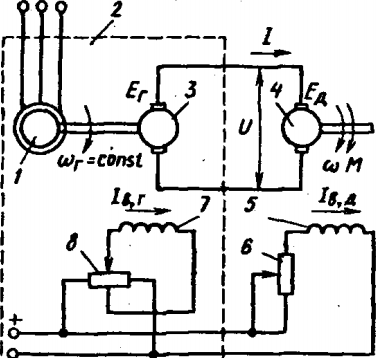
Рисунок 2.13 – Система «генератор – двигатель»
Регулирование напряжения на якоре ДПТ происходит за счет изменения тока возбуждения генератора Iвг, при регулировании которого с помощью потенциометра 8 изменяется ЭДС генератора Ег и соответственно напряжение на якоре двигателя U. Регулирование напряжения в этой системе может сочетаться с воздействием на магнитный поток двигателя, что обеспечивает двухзонное регулирование скорости. Регулирование магнитного потока двигателя осуществляется за счет включения в цепь обмотки 5 возбуждения двигателя резистора 6. В замкнутых ЭП питание обмотки 7 возбуждения генератора происходит от регулируемого источника постоянного тока, например, полупроводникового УВ. Характеристики системы «генератор – двигатель» соответствуют рис. 2.12, б.
Достоинства системы:
1 Плавность и большой диапазон регулирования скорости.
2 Высокая жесткость и линейность характеристик.
3 Возможность получения всех энергетических режимов работы ДПТ.
Недостатки:
1 Низкий КПД.
2 Инерционность процесса регулирования.
3 Необходимость в обслуживании.
4 Повышенный шум при работе.