

2.1.10 Система «тиристорный преобразователь – дпт»
Принцип действия, свойства и характеристики системы рассмотрим на примере схемы трехфазного нереверсивного мостового управляемого выпрямителя, схема которого приведена на рисунке 2.14.
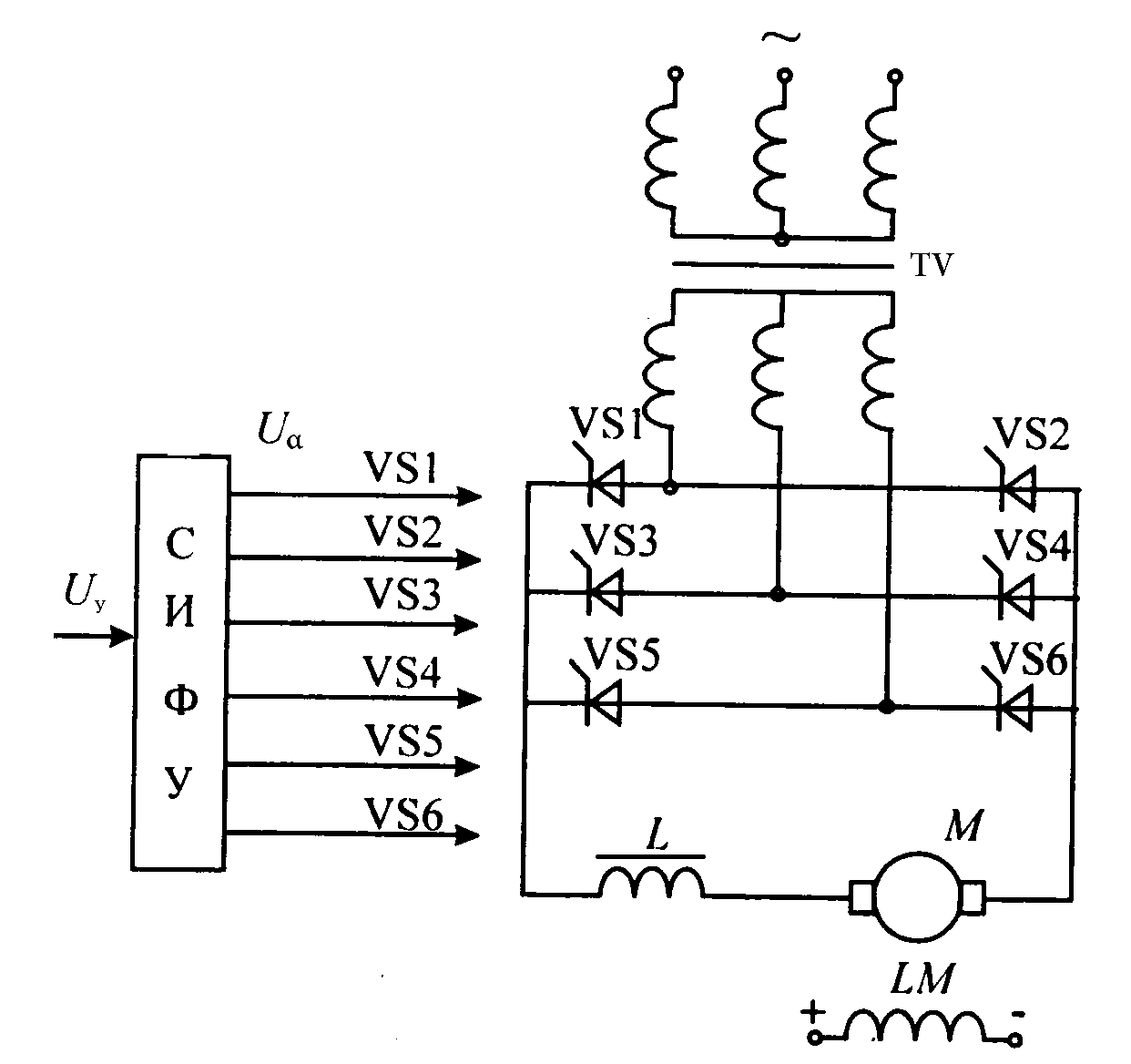
Рисунок 2.14 – Система «тиристорный преобразователь – ДПТ»
Система состоит из согласующего трансформатора TV, шести тиристоров VS1 – VS6, сглаживающего дросселя L и системы импульсно-фазового управления тиристорами СИФУ.
Регулирование напряжения на якоре двигателя происходит путем изменения среднего значения ЭДС преобразователя ЕП. Это достигается регулированием с помощью СИФУ по сигналу управления UУ угла α управления тиристорами. α – это угол задержки открытия тиристоров относительно момента, когда напряжение на их анодах становится положительным.
![]()
где m – число фаз;
Emax – амплитудное значение ЭДС преобразователя;
Еср0 – ЭДС преобразователя при α = 0.
Статические характеристики системы «тиристорный преобразователь – ДПТ» показаны на рисунке 2.15. Особенностью характеристик является наличие области прерывистого тока с малой жесткостью характеристик (заштрихованная область).
Достоинства системы:
1 плавность и широкий диапазон регулирования скорости;
2 высокая жесткость характеристик;
3 высокий КПД электропривода;
4 бесшумность в работе (по сравнению с электромашинными выпрямителями);
5 не требует обслуживания в процессе эксплуатации.
Недостатки системы:
1 напряжение на якоре и ток имеют пульсирующий характер;
2 необходимость использования сглаживающего дросселя;
3 наличие области прерывистого тока на характеристиках;
4 невысокая помехозащищенность и малая перегрузочная способность по току и напряжению тиристорных преобразователей.

Рисунок 2.15 – Статические характеристики системы «тиристорный преобразователь – ДПТ»
2.1.11 Регулирование координат эп с дпт нв в системе «источник тока – двигатель»
Преобразователи со свойствами источника тока характеризуются тем, что выдают в нагрузку мало изменяющийся по величине ток. Двигатель, питаясь от такого преобразователя приобретает специфические свойства и возможности по регулированию координат, в первую очередь момента. Функциональная схема системы «источник тока – двигатель» приведена на рисунке 2.16.
По обмотке якоря протекает постоянный по величине и направлению ток. Величина и направление тока в обмотке возбуждения регулируется по величине положением потенциометра R, а по величине и направлению – с помощью ключей К1 и К2.
Электромеханическая характеристика такой системы имеет вид прямой вертикальной линии (рисунок 2.17,а). Ток якоря и момент двигателя связаны между собой линейной зависимостью:
![]()
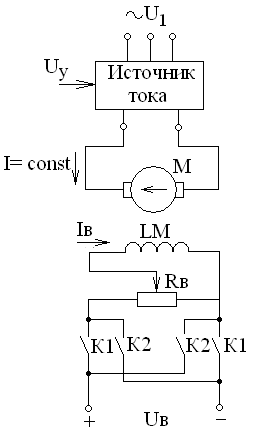
Рисунок 2.16 – Система «источник тока – двигатель»
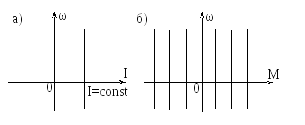
Рисунок 2.17 – Статические характеристики системы «источник тока – двигатель»
Таким образом, при постоянном токе якоря на величину и направление момента двигателя влияет только величина и направление магнитного потока, определяемые величиной и направлением тока в обмотке возбуждения. Следовательно, механические характеристики системы будут иметь вид прямых вертикальных линий, положение которых справа или слева от оси скорости определяется направлением магнитного потока, а ближе или дальше от оси – его величиной (рисунок 2.17,б).
Таким образом, двигатель при питании якоря от источника тока приобретает свойства источника момента, управляемого по цепи возбуждения.