

15.5. Автомати безпеки. (ст. 523)
Літальний апарат може виконувати свої функції тільки в певних умовах. Вихід за межі цих умов (за обмеження) може привести до зриву завдання або погрозі безпеки польоту. Застосування автоматів безпеки (обмеження граничних режимів) викликається вимогами неприпустимості виходу ЛА на критичні режими польоту, до яких відносяться: (граничне допустиме перевантаження, критичний кут атаки, мінімальні й максимальна допустимі швидкості, мінімальна висота польоту й деякі інші.
Автомати безпеки забезпечують автоматичне відхилення відповідних рулів ЛА, запобігаючи його виходу на критичні режими польоту, або включення сигналізації, що попереджає екіпаж про наближення таких режимів. До складу автомата безпеки входять відповідні датчики, обчислювач, виконавчий механізм й орган керування.
Застосування таких автоматів у значній мірі підвищує, безпеку польотів, тому що в процесі пілотування ЛА у складних умовах (особливо в бойовій обстановці) льотчик не в змозі стежити за показаннями всіх приладів і тим більше визначати можливість виходу на критичний режим. Якщо ЛА не оснащений автоматичними контурами обмеження граничних режимів, то, по-перше, ускладнюється пілотування ЛА, по-друге, збільшується частка уваги, яку льотчик повинен приділяти пілотуванню, по-третє, льотчик повинен управляти ЛА обережно, тримаючись подалі від граничних режимів, тобто тактико-технічні можливості ЛА використаються не повністю.
Завдяки автоматичним контурам обмеження граничних ре жимів льотчик при виконанні інтенсивних маневрів із граничними кутами атаки не боїться введення ЛА у режим звалювання. Це дозволяє йому при веденні повітряного бою сконцентрувати свою увагу на навколишнім оточенні.
Модуль 3.9.1. САУ ЛА
15.7. Системи автоматичного керування (стор. 330)
1. Призначення, склад та основні елементи САУ
2. Принцип дії та режими роботи САУ
3. Особливості експлуатації САУ
Системою автоматичного керування (САУ) прийнято називати бортову систему, призначену для вирішення широкого кола завдань, пов'язаних з керуванням польотом. До них відносяться як забезпечення необхідних характеристик стійкості й керованості при ручному пілотуванні, так. і автоматичне й директорне керування ЛА на різних етапах польоту.
САУ пілотованих ЛА з'явилися в результаті подальшого розвитку автопілотів. Виконуючи всі функції систем більше низького рівня автоматизації керування (демпферів, автоматів стійкості, автоматів безпеки, автопілотів), САУ мають розвиненіші функції керування рухом центра мас ЛА в інтересах рішення задач. навігації, наведення на ціль й посадки. Відмінною особливістю САУ є її широкий зв'язок з іншим бортовим пілотажним і навігаційним устаткуванням, навігаційними й прицільно-навігаційними комплексами.
Завдання розв'язувані САУ, залежать від типу й призначення ЛА, також від режимів роботи САУ. Характерними для САУ є режими автоматичної стабілізації й керування кутовим положенням ЛА, режими траекторного керування й бойові режими.
Перша група режимів забезпечує:
-
демпфування короткоперіодичних кутових коливань ЛА;
-
стабілізацію й керування кутовим положенням ЛА;
-
стабілізацію заданої барометричної висоти;
-
приведення ЛА до горизонтального польоту з будь-якого просторового положення;
-
виведення з небезпечної висоти;
-
ручне керування ЛА при включеної САУ.
Режими автоматичної стабілізації й керування кутовим положенням ЛА реалізуються в САУ так само, як в автопілоті.
Режим виведення з небезпечної висоти включається автоматично,якщо ввімкнено радіовисотомір і прибрані шасі. Висота вмикання задається спеціальним перемикачем. Після виходу ЛА із зони небезпечної висоти включається режим приведення до обрію.
Тракторне керування вимагає використання інформації інших систем - навігаційних систем, радіолокаційних станцій.
У режимах траекторного керування вирішуються завдання:
-
польоту по заздалегідь запрограмованому маршруті й по оперативних пунктах маршруту;
-
повернення на аеродром посадки;
-
захід на посадку по сигналах наземних радіомаяків й ін.
Бойові режими роботи САУ забезпечують наведення на повітряну ціль із землі по командах станції радіонаведення, а також самонаведення по сигналах бортової прицільної станції.
У деяких САУ передбачена можливість забезпечення польоту ЛА на малих і гранично малих висотах з обльотом перешкод по сигналах радіолокаційного далекоміра.
З метою стабілізації та керування швидкістю польоту ЛА в контури системи керування включають важіль керування двигуном. Контур автоматичного керування швидкістю польоту шляхом зміни тяги двигунів звичайно називають автоматом тяги. Наявність автомата тяги дозволяє керувати швидкістю польоту при одночасній стабілізації центра мас, що конче потрібно при заході на посадку, зльоті, зниженні, наборі висоти, польоті на малій висоті й польоті строєм.
Принцип роботи автомата тяги розглянемо за структурною схемою, показаною на рис.15.9. Задане значення швидкості польоту встановлюється за допомогою коректора-задатчика швидкості КЗСП. При відхиленні швидкості від заданої, блок автомата тяги БАТ формує сигнал керування, що після посилення в блоці магнітних підсилювачів БМУ видається на виконавчий механізм автомата тяги ИМ. Виконавчий механізм переміщає важіль керування двигунами РУД, керуючи тягою авіадвигунів АД.

Рис. 15.9
Для поліпшення якості регулювання в автоматі тяги використовується сигнал по поздовжноьму перевантаженню nx , що вимірюється датчиком горизонтальних прискорювань ДГУ. За допомогою автомата тяги можна не тільки стабілізувати швидкість польоту, але й керувати нею, використовуючи коректор-задатчик швидкості.
Загальна структура САУ пілотованих ЛА зображена на рис.15.10. У лівій частині малюнка показані джерела інформації. Пунктирними лініями позначені пристрої , що не входять до складу САУ. Датчики інформації, що входять у комплект САУ, призначені для визначення параметрів руху ЛА й для контролю режиму польоту. Навігаційні й прицільні системи забезпечують автоматизацію траекторного руху й бойового маневрування.
Центральне місце в структурі займають обчислювально-перетворювальні пристрої. Вони реалізують обрані закони керування, здійснюють перемикання режимів польоту й узгодження різних надходячих сигналів, що часто відрізняються фізичною природою.
Сформовані обчислювачем сигнали керування в автоматичному режимі надходять на серводвигуни рулів, забезпечуючи автоматичний політ ЛА по заданій траєкторії, а в напівавтоматичному (директорному) - на стрілки командних приладів.

Рис.15.10
Напівавтоматичний режим керування ЛА застосовується при несправності виконавчої частини САУ, а також при заході на посадку, наведенні на повітряні й наземні цілі. У даному режимі керування льотчик звільнений від необхідності рішення складних завдань із розрахунку оптимальних впливів на органи управління ЛА. При цьому САУ забезпечує надходження на командні прилади команд керування. При відхиленні командних стрілок льотчик повинен домогтися повернення їх у вихідне положення відповідним переміщенням важелів керування. Усунення від відхилення стрілок означає, що льотчиком створене перевантаження (крен для бічного каналу), рівне заданому обчислювачем значенню. Напрямок переміщення ручки керування при пілотуванні по командному приладі повинне збігатися з напрямом відхилення командних стрілок, а величина її переміщення повинна бути узгоджена з величиною відхилення цих стрілок. Необхідну відповідність по величині льотчик встановлює у процесі тренувань. Закони формування відхилень командних стрілок вимагають від льотчика простого керування кутовими рухами ЛА для утримання стрілок у нейтральному положенні.
Як командний прилад у САУ використається командно-пілотажний прилад (КПП), що являє собою комбінації авіагоризонту з командними й додатковими стрілочними покажчиками (рис.15.11). У центрі шкали приладу розташований

Рис.15.11
нерухомий індекс, оточений малим кільцем 9. Командні стрілки бічного 3 і поздовжнього 5 каналів переміщаються магнітоелектричними пристроями по сигналах, що надходить із обчислювача.
Аналогічними магнітоелектричними пристроями переміщуються стрілки нуль-індикаторів бічного відхилення 7 і відхилення по висоті 4. Ці стрілки вказують відхилення центра мас ТАК від лінії заданого шляху як при польоті по маршруті, так і при заході на посадку. При положенні стрілок 4 й 7, показаному на рис.15.11, ЛА перебуває нижче заданої траєкторії й ліворуч від лінії заданого шляху, тобто центр мас ЛА на КПП зображений у вигляді кіл угорі в центрі й ліворуч у центрі. Показання цих стрілок льотчик використовує для контролю правильності роботи САУ.
Інформація про поточні значення кутів крену й тангажа видається стрілкою-силуетом літака 10 щодо нерухомої шкали крену 11 і стрічкової рухливої шкали 2.
У нижній частині КПП є покажчик 13. Крім того, у приладі є допоміжні елементи. Кнопка-лампа 1 використається для дистанційного аретирування гіродатчика кутів крену й тангажа. Ручка 12 забезпечує встановлення шкали тангажа. Бленкери 6 й 8 сигналізують про наявність живлення в поздовжньому й бічному каналах директорного керування. При увімкненому живленні бленкери перебувають у прибраному положенні.
Індикація кутів крену в КПП здійснюється за принципом «із землі на ЛА». Наприклад, при правом крені стрілка-силует ЛА 10 (див.рис.15.11) повертається по годинній стрілці, а відлік ведеться по нерухомій шкалі 11.
При індикації за принципом «з ЛА на землю», що має місце в командно-пілотажних приладах типу ПКП, стрілка-силует залишається нерухомої, а повертається проти годинникової стрілки (при правому крені) рухлива шкала.
Прилади типу ПКП установлюється на маломаневренних ЛА, а КПП - на маневрених Ла.
При директорному керуванні вертикальна стрілка 3 нахиляється вліво - вправо щодо нижньої точки кріплення, а горизонтальна 5 переміщається вниз. Льотчик повинен відхиляти ручку керування відповідно до відхилення стрілок (стрілка 3 - уліво і ручка - уліво; стрілка 5 - нагору і ручка по тангажу - на себе і т.д.), утримуючи їх у межах малого кільця 9. Дії льотчика при пілотуванні по командному приладу (для бічного каналу) ілюструється рис.15.12. У положенні 1 ЛА відхилений від лінії заданого шляху (ЛЗП), і вектор шляхової швидкості не збігається по напрямку з дотичної до траєкторії бічного маневру, заданої обчислювачем; відповідно до положення командної стрілки крену льотчик відхиляє важіль керування креном уліво. У положень 2 ЛА зближається із ЛЗП, вектор швидкості спрямований по дотичній до заданої траєкторії; положення командної стрілки крену та РУ - нейтральне. У положеннях 3 й 4 зближення із ЛЗП триває, однак вектор швидкості відхиляється від дотичної до заданої траєкторії маневру вліво; директорна стрілка відхиляється вправо, змушуючи льотчика відхиляти РУ також вправо. При виході ЛА на ЛЗП із заданим курсом командна стрілка крену й стрілка бічних відхилень установлюються в нейтральне (нульове) положення 5, що свідчить про закінчення маневру. Командна стрілка крену в процесі бічного маневру встановлюється в нейтральне положення щораз, коли вектор шляхової швидкості спрямований по дотичній до заданої траєкторії маневру.

Рис.15.12
Формування
команд керування може бути різним
навіть
при рішенні однотипних завдань у різних
САУ.
Наприклад, в одних САУ
для забезпечення аперіодичного характеру
процесу керування при формуванні
відхилення вертикальної стрілки крену
КПП
використовуються значення відхилення
Z і швидкості відхилення центра мас
літака
![]() від заданої лінії шляху, в інших - Z та
відхилення
курсу від його заданого значення ΔΨ.
Вибір того або іншого способу формування
законів відхилення командних стрілок
залежить від режимів польоту і джерел
пілотажно-навігаційної інформації.
від заданої лінії шляху, в інших - Z та
відхилення
курсу від його заданого значення ΔΨ.
Вибір того або іншого способу формування
законів відхилення командних стрілок
залежить від режимів польоту і джерел
пілотажно-навігаційної інформації.
На рис.15.13 показаний вид лицьової панелі навігацйно-пілотажного приладу НПП. Цей прилад служить для видачі екіпажу навігаційної інформації. Поточний курс ЛА відраховується по рухомій шкалі 6 (переміщується відповідно до інформації від курсової системи) щодо нерухомого індексу 5. На цій же шкалі стрілка 4 вказує заданий курс. Відхилення стрілки 4 може задаватися льотчиком шляхом повороту ручки 10 або здійснюється автоматично системою стеження по сигналах навігаційних пристроїв. По нерухомій шкалі 1 відносно рухливої стрілки 2 визначається курсовий кут радіостанції.

Рис.15.13
Стрілка 2 приводиться в рух системою стеження, по сигналам радіонавігаційної системи або автоматичного радіокомпаса (АРК). На відміну від стрілок 4 та 7 КПП стрілки 7 та 8 НПП показують відхилення від заданої траєкторії (глісади) тільки при заході на посадку. Бленкери 3 та 9 сигналізують про вхід у зону впевненого прийому сигналів курсового й глісадного радіомаяків, що забезпечують автоматизацію заходу на посадку. Особливістю НПП є те, що він обчислює відхилення від заданого курсу.
У різних режимах САУ сполучається з різними зовнішніми системами, робота з якими дозволяє здійснювати автоматизацію траекторного керування. До основних зовнішніх систем, пов'язаним із САУ, відносять:
- гіроскопічна система типу центральної гіровертикалі (ОГВ);
- курсова система (КС);
- автоматичний радіокомпас (АРК);
- радіокомандна система (РКС);
- радіовисотомір(РВ);
- система навігації й посадки (РСБН - радіосистема ближньої навігації);
- бортова радіолокаційна станція (РЛС) та ін.
Однією з функцій САУ, що забезпечує безпеку польоту, є автоматичне витримування експлуатаційних обмежень. Реалізація цієї функції дозволяє запобігти виходу ЛА на критичні режими польоту, пов’язані з небезпекою виникнення аварійних ситуацій або ситуацій, що ставлять під сумнів можливість виконання бойового завдання. Дана функція є розвитком й узагальненням функцій, які, виконують автомати безпеки.
Основою надійної, безпечної роботи САУ є грамотна технічна експлуатація.
Для проведення регламентних робіт і підготовки САУ до польотів використається, в основному, три типи апаратури:
- штатна неавтоматизована контрольно-перевірочна апаратура;
- автоматизовані системи контролю (АСК);
- вбудовані системи контролю (ВСК).
Неавтоматизована перевірочна апаратура має в складі пульти-імітатори й контрольно-вимірювальні пульти різного цільового призначення. Перевірки відбуваються або з реальними інформаційними системами, або з їхніми імітаторами. Ряд датчиків (наприклад, ДУС, ДПЛ і т.д.) знімаються з ЛА та встановлюються на спеціальні платформи, що імітують його еволюції.
Найбільш трудомісткою операцією технічної експлуатації САУ є операція перевірки й налаштування передаточних чисел.
AСK слугують як для підготовок САУ, так і для проведення регламентних робіт. Підключається АСК до бортових контрольних рознімань ЛА без зняття агрегатів САУ. Основним завданням АСК є перевірка функціонування й основних параметрів найбільш відповідальних і найменш надійних підсистем і пристроїв САУ.
Звичайно АСК мають два режими роботи: автоматичний і вибірковий контроль.
Застосування АСК дозволяє зменшити час перевірки САУ й знизити витрати зусиль, однак не вирішує питання про контроль функціонування системи керування в польоті. Тому усе більш широке застосування знаходять системи вбудованого (або бортового) контролю.
Впровадження ВСК разом з використанням наземних АСК дозволяє одночасно вирішувати наступні завдання:
- скорочення строків підготовки САУ до застосування;
- скорочення витрати зусиль;
- збільшення глибини й об'єктивності інструментального контролю.
Під час польоту основними функціями ВСК є наступні:
- перевірка каналів САУ на функціонування з виявленням відмов;
- автоматичне відключення основного каналу при виникненні відмов і включення дублюючого каналу;
- блокування вмикання несправного каналу;
- автоматичне перемикання на інший режим роботи САУ, що забезпечує безпеку польоту, якщо при виникненні відмови не забезпечується необхідна якість керування на включеному режимі;
- сигналізація екіпажу про відмови САУ.
ПРИЛАДИ ДЛЯ ВИМІРУ КУТОВИХ ПОЛОЖЕНЬ ЛІТАЛЬНОГО АПАРАТА (стр 242)
Кутові положення літального апарата щодо обрію характеризуються кутами крену γ і тангажа υ і курсом ψ щодо меридіана. Тому як при ручному, так і при автоматичному керуванні літальним апаратом необхідно постійно мати інформацію про зміну цих параметрів.
Прилади, що служать для візуального контролю за кутами крену й тангажа, називаються, авіагоризонтами. Датчики кутів крену й тангажа називаються гіровертикалями. І авіагоризонти й гіровертикалі являють собою гіроскопічні пристрої з візуальним або електричним виходом.
Для якісного. керування літальним апаратом необхідно також вимірювати кутові швидкості, покажчиками й датчиками яких є також гіроскопічні пристрої.
Гіроскопи знайшли широке застосування і у системах стабілізації кутового положення різних пристроїв на літальних апаратах.
Так, наприклад, широко застосовуються гіроскопічні пристрої для стабілізації кутового положення антени, аерофотоапаратів, прицілів та інших пристроїв.
Загальні властивості гіроскопа (стр 243)
Гіроскопом називається симетричний ротор, що швидко обертається навколо осі симетрії і має додаткові кутові ступені свободи. По числу кутових ступенів свободи гіроскопи діляться на триступеневі (рис. 8.12) і двоступеневі (рис. 8.13).
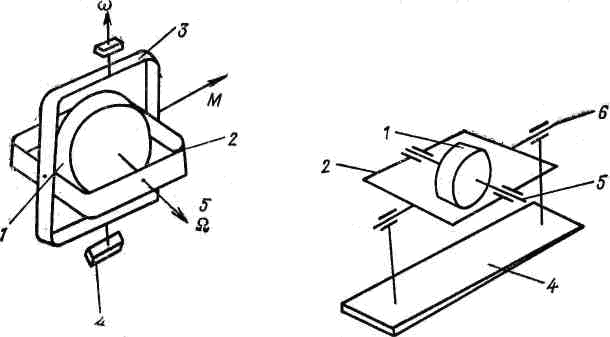
Рис 8.12 Рис. 8.13
Гіроскоп із трьома .ступенями свободи має кардановий підвіс, що складається із внутрішньої 2 (рис. 8.12) і зовнішньої 3 рамок, рухливих відносно основи 4. Точка перетину всіх трьох осей й є нерухомою точкою гіроскопа. У гіроскопів із двома ступенями свободи зовнішньої рамки немає. Внутрішня рамка в явному виді відсутня - її роль виконує, корпус ротора.
На практиці застосовують технічні гіроскопи, частота обертання яких досягає 22 000-23 000 об/хв.
Основні властивості гіроскопа із трьома ступенями свободи наступні:
1) якщо на гіроскоп не діють зовнішні моменти, то головна вісь ротора стало зберігає незмінне положення стосовно інерціальної системи координат (стосовно зірок);
2) якщо на ротор гіроскопа діє момент зовнішніх сил М, те головна вісь гіроскопа робить прецесивний рух. П р е ц е с і я — це специфічний для гіроскопа рух. Під дією зовнішнього моменту М гіроскоп робить рух (прецесує) з кутовою швидкістю ω, прагнучи сполучити по найкоротшій відстані вісь ротора гіроскопа (вектор Ω) з вектором М.
Перша основна властивість триступеневого гіроскопа дає можливість створювати гіроскопічні прилади напрямку (гірокомпас, гіровертикаль і т.д.), а друга властивість використовується для керування напрямком головної осі ротора гіроскопа і його корекції.
Основні властивості гіроскопа із двома ступенями свободи наступні:
1) головна вісь 5 ротора гіроскопа (рис. 8.13) повертається в напрямку моменту, що діє по вихідній осі 6;
2) головна вісь ротора гіроскопа прагне сполучитися з вектором кутової швидкості обертання підстави 4, на якій він установлений.
Ці властивості використовуються в гіроскопічних приладах, призначених для виміру кутів повороту, кутових швидкостей, кутових прискорень літальних апаратів.
Принцип побудови гіровертикалі (стр 244)
Для виміру кутів крену й тангажа, що визначають положення літального апарата щодо площини обрію, необхідно мати як початок відліку площину обрію або напрямок істинної вертикалі.
Відомо, що звичайний маятник у спокійному стані встановлюється по істинній вертикалі — напрямку сили ваги, перпендикулярної до площини істинного горизонту. Тому якщо на літальному апарату підвісити маятник і з фюзеляжем зв'язати шкалу, то на стоянці маятник покаже кути крену й тангажа стоянки.
У польоті літальний апарат майже безупинно зазнає прискорення. Тому маятник установиться не по істинній вертикалі, а по уявній вертикалі — рівнодіючої R сили ваги G й інерційної сили F (рис. 8.14). Отже, при наявності прискорень вимірювати крен за допомогою маятника неможливо.
При правильному віражі піднімальна сила Y, спрямована по нормалі літака, дорівнює й протилежна рівнодіючій R. У цьому випадку маятник буде стояти на нулі, у той час як політ відбувається із креном.
Якщо крен не відповідає швидкості розвороту, то піднімальна сила не буде збігатися з уявною вертикаллю. При цьому літак отримає ковзання на крило, а маятник відхилиться від нуля.
Кут β між нормаллю літака й уявною вертикаллю (маятником) називають кутом ковзання. Таким чином, маятник на літаку є покажчиком ковзання, а не крену.
Покажчик ковзання встановлюється на кожному літальному апарату для полегшення правильного пілотування. Він є фізичним маятником і виконується у вигляді кульки, поміщеного у вигнуту по дузі скляну трубку (рис. 8.15), що заміняє нитку підвісу. Радіус вигину дорівнює довжині маятника. Чим більше радіус вигину, тим дошкульніше покажчик ковзання.

Рис. 8.14 Рис. 8.15
Для демпфірування коливань маятника трубка заповнюється рідиною. На трубку нанесені ризики положення кульки при збігу уявної вертикалі з нормаллю літального апарата, тобто в польоті без ковзання.
Покажчик ковзання монтується на лицьових шкалах основних пілотажних приладів: авіагоризонту, покажчика повороту.
Для виміру кутів крену й тангажа можна використати вільний триступеневої гіроскоп з вертикальним розташуванням головної осі. Але такий гіроскоп зберігає положення ротора незмінним не відносно Землі, а в абсолютній (інерціальній) системі координат, практично точною моделлю якої є система, зв'язана із зірками. Крім того, відхилення від вертикалі реального гіроскопа буде додатково викликатися відходами через моменти сил тертя та розбалансування.
Тому на практиці застосовують системи, у яких використовуються позитивні властивості гіроскопа із трьома ступенями свободи (підвищена інерційність стосовно зовнішніх впливів) і маятника (здатність встановлюватися по істинній вертикалі при відсутності прискорень). Такими системами і є гіровертикалі, що представляють собою гіроскопи з маятниковою корекцією їхнього положення.
Гіровертикалі
призначені для виміру кутів крену й
тангажа. Кут тангажа υ![]() — це кут між горизонтальною площиною
X/OZ/
і
поздовжньою віссю X
літака
(рис. 8.16,а).
Кут
крену γ визначається як кут між
вертикальної площиною, що проходить
через поздовжню вісь X,
і
площиною симетрії літака ХОУ/
(рис.
8.16,б).
— це кут між горизонтальною площиною
X/OZ/
і
поздовжньою віссю X
літака
(рис. 8.16,а).
Кут
крену γ визначається як кут між
вертикальної площиною, що проходить
через поздовжню вісь X,
і
площиною симетрії літака ХОУ/
(рис.
8.16,б).

Рис. 8.16
Принцип побудови гіровертикалі можна пояснити, використовуючи рис.8.17. Вісь зовнішньої рамки 1 розташовується паралельно поздовжній осі літака. У нижній частині гіровузла 2 є маятниковий пристрій 3, сигнали якого при відхиленні осі ротора від вертикалі подаються на моментні двофазні асинхронні електродвигуни Д1 і Д2 поперечної й поздовжньої корекції.

Рис. 8.17
Моменти М1 і М2 цих двигунів, що прикладають до гіроскопа, забезпечують його відновлення до вертикалі. Тому вісь гіровузла втримується в горизонтальній площині і є віссю виміру кутів тангажа. Віссю виміру кутів крену слугує вісь зовнішньої рамки.
Маятниковий пристрій являє собою рідинний маятник, що називається електролітичним перемикачем корекції. Конструктивно він виконаний у вигляді мідного герметичного корпуса, заповненого провідною рідиною - електролітом. Роль маятника виконує повітряний пузир. У кришку корпуса впресовано чотири симетрично розташованих контакти.
Якщо гіровузол вертикальний, пузир займає центральне положення, так що поверхні зіткнення всіх контактів з рідиною однакові. Тому результуючий момент двигунів дорівнює нулю.
При відхиленнях гіроскопа від вертикалі пузир зміщається, внаслідок чого виникають коригувальні моменти двигунів, під діями яких гіроскоп буде прецесувати до вертикалі.
Необхідно відзначити, що гіровертикалі розглянутої кінематики непридатні для літаків необмеженого маневрування, тому що при кутах тангажа, близьких до ±90°, відбувається сполучення осей ротора й зовнішньої рамки, що викликає вибивання гіроскопа.
Авіагоризонти (стр 247)
Гіровертикалі з покажчиком положення літального апарата щодо площини обрію називаються авіагоризонтами.
Найбільш простим авіагоризонтом є авіагоризонт АГБ-2 бомбардувальника. Його кінематична схема аналогічна схемі гіровертикалі, показаної на рис. .8.17. Крім того, АГБ-2 має систему індикації, що дає наочне подання про положення літака щодо горизонтальної площини.
Кругла шкала з розподілами кутів тангажа й індексом крену пов'язана із зовнішньою рамкою. Рухлива планка, що імітує лінію обрію, зв'язана кулісним механізмом з рамкою гіроскопа. Шкала кренів нерухома. Силует літака пов'язаний з корпусом приладу кремал’єрою, і його можна зміщати вгору й униз у межах декількох градусів кута тангажа.
При наявності крену разом з літаком нахиляється корпус приладу і силует літака. Лінія обрію, пов'язана з рамками, залишається горизонтальної. Льотчик же бачить відхилення «лінії обрію» щодо силуету літака убік, обернену крену.
При кабрируванні через кулісу планка «лінії обрію» опускається нижче силуету літака. Льотчик бачить на шкалі приладу взаємне розташування силуету літака й лінії обрію так, як він бачить природний обрій з літака.
Авіагоризонт АГБ-2 може бути встановлений на літальних апаратах, у яких кути γ й υ не можуть перевищувати 70°, тому що, як ми вже відзначали, при більших кутах авіагоризонт «вибивається» і користуватися ним практично неможливо.
Авіагоризонт, установлений на винищувачі, повинен забезпечувати вимір γ й υ при будь-яких еволюціях, тому кінематика його гіровузла більше складна. Щоб при більших кутах гіроскоп не вибивався, тобто вісь ротора не збігалася з віссю зовнішньої рамки, підшипники осі зовнішньої рамки закріплені не в корпусі приладу, а в додатковій слідкуючій рамі, 1. Вісь слідкуючої рами розташовується по поздовжній осі літака, і її підшипники закріплені в корпусі приладу (рис. 8.18).
При будь-яких кренах рама, що стежить, забезпечує взаємну перпендикулярність осей і максимальну стійкість гіроскопа.

Рис. 8.18
Для поліпшення системи індикації в сучасних авіагоризонтах покажчики відокремлюються від гіродатчиків. Так, дистанційний авіагоризонт АГД-1, що встановлюється майже на всі літаки, складається з гіродатчика і одного або двох покажчиків.
Гіродатчик має гіровузол з поперечним розташуванням осі зовнішньої рамки й з слідкуючою рамою, завдяки чому АГД працює при будь-яких кутах крену й тангажа. У гіроагрегат введений електромеханічний аретир для швидкого приведення осі ротора гіроскопа до нормалі літака. Включення аретира відбувається при включенні приладу автоматично, а під час роботи його — натисканням кнопки аретира на лицьовій стороні покажчика. Розаретирування після приводу гіроскопа до нормалі у всіх випадках виробляється автоматично. Поперечна корекція вимикається на віражах груповим вимикачем корекції ВК-53РБ. Поздовжня корекція вимикається при поздовжніх прискореннях більше 1,67 м/с2 за допомогою рідинного перемикача.
Знімання кутів крену й тангажа виробляється за допомогою двох сельсинів, які розміщені: один - на осі зовнішньої рамки, інший - на осі слідкуючої рами. Гіродатчик розміщається поблизу центра мас літака й строго орієнтований щодо літакових осей. Покажчик установлюється на приладовій дошці.
Крен указує силует літака, що повертається на рухливому кільці щодо корпуса приладу. Кут тангажа відраховується проти центра силуету літака по циліндричній шкалі з нанесеною «лінією обрію» і розподілами кутів тангажа. Шкала вище «лінії обрію» пофарбована у блакитний або ясно-сірий кольори, нижче обрію - у коричневий або чорний. Така система індикації найбільше наочно показує положення літака щодо площини обрію й практично виключає помилки в знятті показань.
Шкала тангажа і силует літака повертаються швидкодіючими слідкуючими системами, сельсини-датчики яких розташовані в гіроагрегаті, а інші елементи (сельсини-приймачі, двигуни-генератори й підсилювачі) розміщені в покажчику.
Для зручності витримування заданого кута тангажа шкалу тангажа можна повертати на додатковий кут ручкою, розміщеною ліворуч на лицьовій стороні покажчика. Для обліку внесеного виправлення є індекс виправлення. Доворот шкали тангажа здійснюється електрично через слідкуючу систему.
Праворуч угорі є червона лампочка сигналізації неробочого стану авіагоризонту. Лампочка горить, коли не включений прилад, у період аретирування приладу й при обриві однієї з фаз живлення авіагоризонту змінним трифазним струмом. Вона сигналізує про те, що показаннями приладу користуватися не можна. Погрішність індикації кутів крену й тангажа біля нуля не перевищує 0,25°. На інших ділянках шкал не перевищує 1,8°.
При кутах тангажа 90±5° показаннями приладу по крену користуватися не треба, тому що при проході υ = 90° силует літака перевертається на 180° (нагору шасі й назад), а точність початку й кінця перевороту лежить у межах ±3°.
Датчик АГД-1 може бути використаний для видачі сигналів γ й υ не тільки на покажчик, але й в інші системи, що вимагають ці сигнали, у вигляді сигналів змінного струму (автопілот, курсова система й т.д.). Якщо споживачеві необхідні сигнали γ й υ у вигляді сигналів постійного струму, то можна використати гіроагрегат АГД із підключеним фазочутливим випрямлячем по одному або по двох сигналах.
Центральні гіровертикалі (стр 249)
Сучасні літальні апарати мають велику кількість різного встаткування, для роботи якого необхідно знати в будь-який момент часу кути крену й тангажа. Якщо для кожного пристрою встановлювати свою гіровертикаль, то значно збільшуються сумарні габарити й маса встаткування. Якщо ж застосувати загальну гіровертикаль, побудовану за схемою авіагоризонту, то через збільшення електричного навантаження і, як наслідок, тертя в осях карданового підвісу точність її буде невисока.
Для рішення цієї проблеми на багатьох літальних апаратах застосовується загальна центральна гіровертикаль ЦГВ, що забезпечує електричними сигналами, пропорційними кутам крену й тангажа, всіх споживачів даних параметрів.
Для виключення впливу моментів зовнішніх сил, обумовлених в основному електричним навантаженням, необхідно на гіроскоп впливати додатковим моментом, рівним за значенням, але протилежним по напрямку моментам зовнішніх сил. У цьому випадку ми будемо мати силову гіроскопічну стабілізацію, дія якої заснована на спільному використанні гіроскопічного моменту й моменту розвантажувального електричного двигуна.
У центральних гіровертикалях на платформі встановлюються два двоступеневих гіроскопи, осі внутрішніх рамок яких взаємно перпендикулярні. Платформа забезпечує третій ступінь свободи для гіроскопів. Електричні сигнали крену й тангажа знімаються з осей платформи, для чого, застосовуються потенціометричні або сельсинні дистанційні передачі.
При впливі зовнішнього моменту виникає прецесія одного з гіроскопів або обох залежно від напрямку й місця прикладання моменту. У результаті цього подається електричний сигнал на розвантажувальні двигуни, які компенсують зовнішній момент.
ЦГВ забезпечують точність видачі електричних сигналів крену й тангажа в межах ±15'. На літальних апаратах знаходять застосування гіровертикалі ЦГВ-2, ЦГВ-4, ЦГВ-5, ЦГВ-10.
Вимірювачі кутових швидкостей літального апарата (стр 250)
Для ручного й автоматичного керування літальним апаратом крім визначення його кутового положення необхідно вимірювати кутові швидкості обертання щодо осей літального апарата. Для цієї мети слугують гіроскопічні вимірники кутової швидкості - швидкісні гіроскопи.
Швидкісний гіроскоп має два ступені свободи, один з яких має пружне обмеження, тобто рамка гіроскопа пов'язана із пружиною. Якщо з віссю рамки гіроскопа зв'язати стрілку, то можна одержати покажчик кутової швидкості. Такий прилад називається покажчиком повороту. Його шкала не має цифр, і прилад фактично служить індикатором, що вказує кутову швидкість повороту літака навколо вертикальної осі.
Кінематична схема електричного покажчика повороту ЕУП-53 показана на рис. 8.19. Вісь рамки паралельна поздовжній осі X літального апарата.
При поворотах літака із креном γ до ротора гіроскопа через пружини й рамки прикладається зовнішній момент, спрямований по осі X. На підставі першої властивості двоступеневого гіроскопа головна вісь ротора гіроскопа прагне повернутися в напрямку прикладеного моменту, натискаючи на підшипники рамки. Сили реакції підшипників створюють момент, що викликає поворот головної осі й рамки, з якою зв'язана стрілка покажчика.
На лицьовій панелі ЕУП-53 є також покажчик ковзання, аналогічний використовуваному в покажчику авіагоризонту АГД-1.
Покажчик повороту, аналогічний ЕУП-53, входить до складу так званого дублера авіагоризонту ТАК-200, що поєднує в одному корпусі також варіометр ВАР-200 і покажчик ковзання. Таке сполучення приладів дозволяє льотчику у випадку відмови авіагоризонту досить просто здійснювати прямолінійний горизонтальний політ, робити на крейсерській швидкості правильні розвороти із заданим кутом крену. Звичайний рамковий швидкісний гіроскоп застосовується також й у вимикачі корекції ВК-53РБ. У корпусі вимикача крім гіроскопа розміщений електромеханічний пристрій затримки часу. Якщо кутова швидкість розвороту перевищує 0,1-0,3˚/с, то через 5-15 с спрацьовує релейна група й забезпечує вимикання поперечної корекції авіагоризонтів, гіровертикалей і курсових систем.

Рис 18.9
Особливості експлуатації гіроскопічних пілотажних приладів (стор 251)
При установці гіроскопічних приладів на літальні апарати необхідно обертати увагу на точність їхнього монтажу. Так, наприклад, для гіровертикалей похибка в установці не повинна перевищувати 1˚. Перевірку правильності установки гіроскопічних пілотажних приладів необхідно поєднувати з нівелюванням літального апарата. Після установки авіагоризонтів АГБ-2 й АГІ-1 на приборну дошку і прилад наносяться червоні контрольні настановні риски. Після заміни гіродатчика або комплекту авіагоризонту на літаках, що не мають дублюючих авіагоризонтів, робота авіагоризонту повинна перевірятися в контрольному польоті за спеціальною програмою. Сполучати обліт авіагоризонту з виконанням інших завдань учбово-бойової підготовки забороняється. Під час передполітною підготовкою гіроскопічних пілотажних приладів обов'язково перевіряється їхня працездатність під струмом. Перевірка працездатності повинна бути закінчена не пізніше чим за 7—10 хв. до посадки льотчика в кабіну. Перевірка авіагоризонту АГД-1 повинна проводитися за допомогою контрольного пульта КП-АГД.
Щоб уникнути передчасного виходу з ладу гіроскопічних приладів забороняється їхнє транспортування до повної зупинки гіромоторів (час вибігу гіромоторів становить 10-12 хв.).
Перевірка працездатності покажчиків повороту виробляється натисканням на приборну дошку. При натисканні на правий край дошки стрілка ЕУП-53 повинна відхилятися вліво, і навпаки.
При виконанні регламентних робіт з гіроскопічними пілотажними приладами використовуються контрольно-перевірочні установки УПГ-56, УЕГП, ПА-АГД, МПУ-1.
ПРИЛАДИ ДЛЯ ВИМІРУ КУРСУ (стор 252)
Курсом літального апарата ф називається кут між деяким напрямком (лінією початку відліку) у горизонтальній площині й проекцією поздовжньої осі літального апарата на цю площину.

Рис. 8.20
Залежно від початку відліку розрізняють істинний курс (ІК), відлічуваний від географічного меридіана, магнітний курс (МК), відлічуваний від магнітного меридіана (від проекції вектора напруженості, магнітного поля Землі на площину обрію), компасний курс (КК), відлічуваний від компасного меридіана (від проекції результуючого вектора напруженості магнітного поля Землі й літака на площину обрію, рис. 8.20).
Авіаційні прилади й системи, що вимірюють курс літального апарата, називаються компасами й курсовими системами.
За принципом одержання інформації про курс розрізняють магнітні компаси, гірополукомпаси, астрономічні компаси та радіокомпаси.
Магнітні компаси
Магнітними авіаційними компасами називаються прилади, у яких для визначення курсу використовується магнітна стрілка (магніт), що встановлюється своєю магнітною віссю в напрямку магнітного меридіана.

Рис - 8.21
Магнітний компас, показаний на рис. 8.21, має чутливий елемент - постійні магніти 6, зв'язані зі шкалою 2 і порожнім поплавком 3. Вся ця рухлива система (котушка має одну точку опори на шпилі 4). Корпус компаса заповнений рідиною. Поплавок і підвіска магнітів надають рухливій системі нижню маятниковість і утримують магніти в горизонтальній площині. Крім того, поплавок зменшує тиск на опору, тертя й кут застою.
Рідина виконує також роль демпфера. При збільшенні температури для компенсації об'єму рідини, що розширюється, є компенсаційна камера. Відлік виконується через скло 5 по шкалі проти курсової межі. Такі магнітні компаси (КІ-12, КІ-13) встановлюються в кабіні як індикаторні для загального орієнтування у випадку відмови інших компасів.
Другим видом магнітних компасів є потенциометричні датчики курсів ПДК-45 (рідинні) і ПДК-3 (сухі), застосовувані в дистанційних гіромагнітних компасах. Їх рухлива магнітна система принципово подібна до системи, розглянутої на рис. 8.21. Сигнали курсу знімаються з нерухомого потенціометра, щітки якого закріплені на осі рухливої системи.
Розглянутим компасам властиві значні похибки через тертя в опорах осі рухливої магнітної системи. Крім того, при розворотах літака виникають помилки «захоплення», оскільки рідина, що починає обертатися при цьому, відхиляє вісь магнітів від напрямку вектора Н. У датчиках ПДК-3 «захоплення» викликається електромагнітним демпфером і тертям в опорах.
Від зазначених похибок вільні індукційні датчики магнітного курсу. Чутливий елемент індукційного датчика являє собою два пермалоєвих сердечники з обмоткою підмагнічування w1 і сигнальною обмоткою w2 ( рис. 8.22). Обмотка підмагнічування намотана так, що створює в сердечниках рівні й протилежні магнітні потоки Фпс з частою 400 Гц. Обмотка w2 охоплює обидва стрижні. Сумарний магнітний потік підмагнічування, дорівнює нулю, і тому е.р.с. у сигнальній обмотці індуціюватися не буде. Обмотка підмагнічування служить тільки для зміни магнітної проникності сердечників з частотою, рівній подвоєній частоті струму обмотки підмагнічування (800 Гц).

Рис. 8.22
Сердечники, перебуваючи в магнітному полі Землі, намагнічуються, причому магнітний потік їх Ф3 визначається вираженням:
Ф3 = S μ H cosα, (8.7)
де S - площа поперечного перерізу сердечника; Н - напруженість магнітного поля Землі; α - кут між поздовжньою віссю стрижня й вектором Н. Цей потік, перетинаючи сигнальну обмотку w2, збуджує у ній е.д.с.:
ес = - ω2 ( dФ3/dt ) = - ω2S cos α dμ/dt (8.8)
Таким чином, індуктивна е.р.с. у сигнальній обмотці w2 залежить від розташування чутливого елемента в магнітному полі Землі.
На практиці використовують чутливий елемент, що складається із трьох пар пермалоєвих сердечників, розташованих під кутом 120° один до одного. Сигнальні обмотки їх можуть бути з'єднані зіркою або трикутником ( рис. 8.23). Для виключення впливу вертикального-складового магнітного поля Землі чутливий елемент міститься у двоступеневому кардановому підвісі й утримується в горизонтальної , площині. Обмотки підмагнічування з'єднані послідовно й живляться напругою частотою 400 Гц.
Сигнальні обмотки з'єднуються зі статором сельсина-приймача 2, напрямок магнітного потоку якого буде змінюватися при зміні курсу. Цей магнітний потік збуджує в обмотці ротора сельсина 3 е.р.с, що підсилюється в підсилювачі 4 і подається на електродвигун 5. Двигун повертає стрілку 6, а разом з нею й ротор до положення, при якому сигнал ротора стане, рівним нулю. При цьому стрілка покаже курс. При зміні курсу стрілка й ротор установляться в нове положення відповідно до зміни курсу.
Магнітні компаси мають цілий ряд методичних похибок. Однієї з основних є девіація.

Рис. 8.23.
Девіацією називається похибка, обумовлена магнітними або електромагнітними полями залізних мас й електрифікованих пристроїв, що перебувають на літальному апараті. Загальну магнітну девіацію магнітних компасів завжди можна уявити собі як складену з постійною круговою девіацією, що не залежить від курсу літака, напівкруговою, змінною за законом синуса або косинуса з одним періодом при зміні курсу літака від 0 до 360°, четвертинній, що також змінюється за законом синуса або косинуса із двома періодами при зміні курсу літака від 0 до 360°, і девіацією вищих порядків.
Девіації магнітних й індукційних компасів, як правило, усувають або зменшують до мінімуму. Перш ніж усувати девіацію, її «списують», тобто визначають залежність її від курсу літака.
«Списання» й усунення магнітних девіацій виконуються штурманом підрозділу або екіпажа спільно з фахівцями з авіаційного устаткування в строки, передбачені інструкцією й регламентом технічної експлуатації, а також при установці на літак додаткового устаткування, що вносить перекручування в магнітне поле, і при заміні датчика або корекційного механізму компаса. Запис про проведення девіаційних робіт у формуляр літака робить штурман підрозділу.
Цю роботу проводять на горизонтальних площадках, що знаходяться не менш ніж на 100 м від стоянок літаків й аеродромних споруджень. При цьому агрегати авіаційного й радіоелектронного устаткування, що працюють у польоті більшу частину часу, повинні бути включені. Постійна складова девіації усувається поворотом корпуса датчика курсу, а змінні складові - спеціальними девіаційними корекційними пристроями. Так, напівкругова девіація усувається за допомогою постійних магнітів, розташованих на корпусі датчика, а четвертна й вищих порядків - за допомогою лекального пристрою корекціойного механізму.
Гірополукомпаси
Принцип дії гірополукомпаса заснований на властивості триступеневого гіроскопа з горизонтальним розташуванням головної осі зберігати положення цієї осі незмінним у просторі.

Рис. 8.24
Прикладом широко розповсюдженого гірополукомпаса ГПК-52АП, електрокінематична схема яка зображена на рис. 8.24. Якщо з віссю зовнішньої рамки зв'язати шкалу ШК, а з корпусом приладу (з поздовжньою віссю літального апарата) індекс І, то по шкалі проти індексу можна відраховувати курс. Вісь обертання ротора гіроскопа стабілізується в горизонтальному положенні за допомогою маятників корекції, аналогічній системі корекції авіагоризонту. Рідинний маятник ЖМ розміщений знизу на кожусі гіроскопа, а електродвигун горизонтальної корекції ЕДГК - на осі зовнішньої рамки. Після запуску приладу головна вісь гіроскопа й лінія С - Ю шкали може займати щодо географічного меридіана довільне положення.
Початкова настанова показання (як у всіх гірополукомпасів) виконується вручну. У ГПК-52АП для цього шкала пов'язана з віссю зовнішньої рамки через електродвигун розвороту шкали ЕДРШ. Штурман, повертаючи рукоятку задатчика курсу ЗК, може довернути шкалу щодо осі зовнішньої рамки в будь-яку сторону з більшою або меншою швидкістю й встановити початкове показання курсу по іншому компасу.
Головна вісь гіроскопа зберігає своє положення в горизонтальній площині відносно інерціального простору, а меридіан обертається разом із Землею, що викликає нагромадження похибки у вимірі курсу. Для усунення цієї помилки необхідно, щоб гіроскоп повертався разом з меридіаном зі швидкістю
ω = Ω3 sin φ, (8.9)
де Ω3 - швидкість обертання Землі;
φ - широта місця. Це обертання гіроскопа створюється азимутальною системою корекції. Електродвигун азимутальної корекції ЕДАК накладає коригувальний момент, рівний
МK = H Ω3 sin φ. (8.10)
Під дією цього моменту гіроскоп прецесує навколо осі зовнішньої рамки зі швидкістю обертання меридіана. Значення моменту задається напругою з потенціометра задатчика широти. Значення широти встановлюється вручну на пульті керування. Гірополукомпас «запам'ятовує» напрямок меридіана, на якому було встановлено початкове показання приладу. Користування таким приладом зручно при далеких польотах.
Припустимо, що необхідно перелетіти із точки А в точку В ( рис. 8.25). Бажано летіти по найкоротшому шляху. Найкоротший шлях між двома крапками на земній поверхні - дуга великого кола, тобто дуга, утворена перетинанням поверхні сфери Землі площиною, що проходить через центр Землі й задані крапки А и В. Ця лінія називається ортодромією.
Якщо прилад буде показувати ширий курс фі, тобто курс щодо меридіана, на якому літак перебуває в польоті, то при польоті по ортодромії льотчику необхідно постійно міняти значення істиного курсу, що практично неможливо.
Лінія, що перетинає всі меридіани під тим самим кутом, називається локсодромією і являє собою спіраль, що сходиться на полюсі. Політ на більші відстані з постійним значенням по локсодромії невигідний, тому що при цьому збільшується довжина шляху, час польоту, витрата палива й ресурсу, зменшується дальність польоту, корисне навантаження й т.д. Гірополукомпас, що має корекцію па обертання меридіана (широтну корекцію), дозволяє робити політ по ортодромії з постійним показанням гірополукомпаса. Початкове показання курсу може бути встановлене як щодо початкового меридіана, так і відносно ортодромії. Таке показання гірополукомпаса називають ортодромічним курсом.
Щоб виключити відхід гіроскопа через його незбалансованість, момент незбалансованості компенсується тим же двигуном ЕДАК, на який подається додаткова напруга з поправочного потенціометра.

Гірополукомпасом ГПК.-52АП користуються і штурман і льотчик. Шкала ШК й індекс І служать покажчиком штурмана. На покажчик льотчика курс передається за допомогою сельсинної дистанційної передачі. При цьому ротор сельсина-датчика СД пов'язаний з віссю шкали, а з корпусом приладу.
ГПК-52АП одночасно служить і датчиком відхилення від заданого курсу. На осі зовнішньої рамки розміщена електромагнітна муфта ЕМ. На заданому курсі ф вона включається й з'єднує з віссю зовнішньої рамки щітку потенціометра. Із цього моменту при відхиленні літака від заданого курсу разом з літаком буде повертатися й потенціометр. Напруга між щіткою й середньою точкою потенціометра буде пропорційно відхиленню від заданого курсу. При вимиканні електромагнітної муфти щітки від'єднуються від осі рамки гіроскопа й пружинами, що центрують, приводяться в нульове положення. Сигнал відхилення від заданого курсу необхідно вводити в автопілот для стабілізації напрямку польоту літака.
ГПК-52АП досить точний прилад. Нагромадження похибки не перевищує 0,5—1° за годину польоту. Гірополукомпасам властива карданна похибка. При кренах літака нахиляється вісь зовнішньої рамки й відлік курсу буде виконуватися не в горизонтальній, а в похилій площині. Карданна похибка виникає при кренах і зникає з їхнім зникненням. Її значення залежить від кута крену й кута між головною віссю гіроскопа й напрямком крену. Урахувати її практично неможливо, тому що напрямок головної осі гіроскопа невідомо. При кренах до 15° вона не перевищує 1°, при кренах 60° вона може досягати 20°.
Достоїнствами ГПК-52АП є:
-
стійкі показання курсу при наявності прискорень;
-
висока точність виміру курсу;
-
відсутність динамічних похибок;
-
можливість польоту по ортодромії.
Недоліки приладу наступні:
-
необхідність іншого компаса для початкової установки показання курсу й періодичного введення виправлень;
-
карданна похибка;
-
неможливість використання при кренах більше 70°.
Інерціальні навігаційні системи
Інерціальні навігаційні системи (ІНС) дозволяють визначати безпосередньо на ЛА що рухається його вектор прискорення, шляхову швидкість і координати положення. ІНС є автономними пристроями, що не вимагають зв'язку з об'єктами, що перебуває поза ЛА. Принцип дії ІНС заснований на вимірюваннях діючих на ЛА прискорень за допомогою лінійних акселерометрів і послідуючому подвійному інтегруванні цих прискорень.
Лінійний акселерометр за структурною схемою , зображеної на рис. 14.7, являє собою грузик масою т, що втримується двома пружинами (механічними або електричними) у напрямних, корпуса 1.

Рис. 14.7
Вісь переміщення чутливого елемента т акселерометра орієнтується по осі X ЛА або по осі навігаційної системи координат. Якщо ЛА відносно осі X повідомляється прискорення X" , то грузик т через свою інерційність переміщається щодо корпуса разом із щіткою потенціометра на відстань, пропорційну прискоренню X". В результаті на вході підсилювача з'явиться напруга V=kX" , пропорційна діючий по осі X прискоренню. Після подвійного інтегрування (1/р) вихідне значення х пройденого ЛА шляху за час польоту.
Як правило, акселерометри, що вимірюють прискорення ЛА, встановлюються на рухливій коригуючій платформі (у платформних ІНС). Для правильного виміру прискорень ЛА й забезпечення необхідної точності роботи ІНС потрібне витримування платформи з акселерометрами в площині обрію з похибкою, що не перевищує одиниць кутових хвилин. Площина обрію досить точно визначається, якщо знати направлення вертикалі (вертикалі місця або місцевої вертикалі).
Відомо, що в стані спокою на поверхні Землі підвіс . (фізичний маятник) дає відмінну індикацію напрямку, місцевої вертикалі. Однак при русі з прискоренням підвіс відхиляється від істинної вертикалі й встановлюється по направленню до заданої вертикалі.
Німецьким вченим Максом Шулером була показана принципова можливість створення незбуджуємого прискореннями маятника. Сутність положення, висловленого Шулером, полягає в тому, що можливо уявити собі маятник, який не дивлячись на прискорення точки підвісу, не буде відхилятися, від вертикалі. Для цього, досить, щоб період його коливання Т був рівний:
![]() 14.3
14.3
де g - прискорення вільного падіння; Rз - радіус Землі
Для одержання такого маятника необхідно мати плече маятника рівне радіусу Землі (Rз = 6370 км), із точкою підвісу на поверхні Землі. Природно, що побудувати такий маятник не представляється можливим, але його можна моделювати.
Модель такого маятника, збурене прискореннями, запропонована в 1932 р. радянським ученим, Е. В. Левенталем, являє собою пристрій (рис. 14,8 а) з гіроскопом Т, головна вісь якого спрямована по вертикалі місця. На платформі, стабілізованої гіроскопом, встановлений акселерометр Ах, вимірюючий прискорення аξ; платформи уздовж осі ξ . Сигнал аξ , що знімається з акселерометра, інтегрується в інтеграторі 1/р і у вигляді сигналу Vξ, пропорційного швидкості руху платформи, через підсилювач із коефіцієнтом підсилення К надходить на моментний двигун гіроскопа, розташований на осі гіроскопа, змушуючи гіроскоп прецесувати. При цьому платформа з акселерометром і гіроскоп буде повертатися навколо осі η встановлювати вісь ξ по напрямку місцевої вертикалі. Така платформа з розміщеним на ній акселерометром для визначення прискорень, стабілізуюча гіроскопом, одержала назву гіростабілізучої платформи (ГСП).

Рис 14.8
ГСП і є тим елементом, що відтворює площину обрію на борті ЛА
Таким чином, пристрій, що складається з гіроскопа, акселерометра й інтегратора, по своїх властивостях, аналогічно маятнику. Акселерометр є його чутливим елементом і моделює інерційну масу, інтегратор - плече (підвіс), а гіроскоп - виконавчий елемент (точку підвісу).
Необхідність повороту ГСП й установки її в площину обрію в польоті обумовлюється тим, що при переміщенні ЛА вздовж меридіану із точки А в точку В. (рис. 14.8, б) місцева вертикаль повертається на деякий кут α , а горизонтально розташованій в точці А гіроплатформа стабілізується гіроскопами в інерціальному просторі, тобто вона не буде зберігати істину вертикаль, а збереже в точці В положення, зазначене на рис. 14.8,б пунктиром. Щоб ГСП залишилася на площині місцевого обрію гіровертикаль також повинна повернутися на кут α слідом за поворотом місцевої вертикалі (радіуса Rз ). Кутова швидкість повороту вертикалі α(t) визначається швидкістю польоту й радіусом Землі:
![]() 14.4
14.4
Для керування розворотом платформи за рахунок прецесії гіроскопа необхідно забезпечити швидкість його прецесії ωr(t) рівну швидкості повороту вертикалі:
ωr(t) = α(t) 14.5
Щоб забезпечити кутову швидкість ωr(t) прецесії гіроскопа, необхідно пропорційний зовнішній момент корекції Мк(t) Зумовлений співвідношенням
![]() 14.6
14.6
де Н - кінетичний момент гіроскопа,Для виконання рівності 14.5 необхідно забезпечити пропорційність між моментом корекцій і швидкістю переміщення ЛА, тобто:
Мк(t) =Vx(t) 14.7
де К - деяка постійна величина, що характеризує коефіцієнт підсилення системи.
При підстановці співвідношень (14.4) і (14.6) в (14.5) з врахуванням (14.7) одержимо умову врівноваження гіровертикалі:
![]()
Отже, якщо до гіроскопа прикладати момент корекції
 14.8
14.8
то можна отримувати незбуджуєму вертикаль. Корекцію ГСП шляхом додатка моменту (14.8), пропорційного інтегралу вимірюваного прискорення ЛА, прийнято називати інтегральною корекцією, яка й реалізується в ГСП, зображеній на рис. 14.8, а.
При переміщенні розглянутої (одноосної) ІСН вздовж паралелі вільна (некоригуюча) ГСП буде відхилятися від площини обрію не тільки за рахунок зміщення ЛА, а й за рахунок добового обертання Землі з кутовою швидкістю Ω=cos(φ) що визначається географічною широтою φ даної паралелі. У цьому випадку для забезпечення умови незбудження ГСП гіроскопу необхідно прикласти коригувальний момент, включаючи складову для компенсації кутової швидкості обертання Землі, тобто:
 14.9
14.9
Це означає, що якщо ГСП із розташованими на ній акселерометрами й гіроскопами встановити точно в площину обрію,а осі її точно орієнтувати по напрямку осей навігаційної системи координат, то при виконанні умов незбудження гіровертикалі (14.8), (14.9) і відсутності похибок акселерометрів і гіроскопів ГСП буде постійно зберігати горизонтальне положення при будь-яких швидкостях і дальностях польоту об'єкта і при будь-яких збуреннях. Настроєна таким чином ІСН є еквівалентом фізичного маятника з довжиною підвісу, рівним радіусу Землі (маятника Шулера). Період коливання такого маятника дорівнює 84,4 хвилини, а частота коливань (частота Шулера) дорівнює

Якщо в момент початку руху ЛА гіроплатформа була відхилена від місцевого обрію на кут β0 (в точці С на рис. 14.8, б), у наступному вона буде робити незатухаючі гармонійні коливання з періодом Т і з амплітудою β0 . Цим пояснюється необхідність високої точності початкового обріювання ГСП при передполітній підготовці ЛА.
Для визначення координат ЛА відносно земної поверхні досить мати два акселерометри, що вимірюють прискорення по двом взаємно перпендикулярним осям, виставлених по осях навігаційної системи координат, розташованим у площині обрію. Таке розташування акселерометрів дозволяє виключити вплив прискорення сили ваги Землі g на показання акселерометрів.
На
рис.4.9. показана одна з можливих схем
інерціальної системи.
На ГСП, розташовані три гіроскопа із
двома ступенями свободи відносно ГСП
(![]() - вектори їх кінетичних моментів) і два
акселерометри Аξ
і Аη
по осям виміру ξ,
η,
які взаємно перпендикулярні. ГСП
підвішена в кардановому підвісі. При
цьому вісь ,Х
зовнішньої рами підвісу збігається з
поздовжньою віссю ЛА, вісь внутрішньої
рами горизонтальна, а вісь платформи
вертикальна. Осі ξ
і
η
ГСП можуть займати в азимуті довільне
положення відносно осей X
і Z
ЛА.
Вони
можуть бути спрямовані як на північ і
схід, так і по осях обраної ортодромічної
системи, координат. Стабілізацію ГСП
в азимуті виконує гіроскоп Г2, а в площині
обрію - гіроскопи Г1 і ГЗ. Якщо вимірююча
вісь ξ
гіроплатформи орієнтована уздовж
меридіана (на північ), а вісь η
уздовж паралелі (на схід) то після
інтегрування (1/р)
сигналів
акселерометрів і додавання з початковими
значеннями швидкостей Vη0
і
Vξ0
отримаємо північну (VξΣ)
і
східну (VηΣ,)
складові шляхової швидкості польоту.
Швидкість VξΣ
множиться на коефіцієнт К
що забезпечує на датчику моментів М3
коригувальний
момент. (14.8) до швидкості VξΣ
додається сигнал -R3Ωcos(φ)
для компенсації горизонтальної
складової кутової швидкості Землі.
Сумарний
сигнал після множення на величину К
у вигляді (14.9) подається на датчик
моментів М1.
У результаті виходить незбуджуюча
гіровертикаль.
- вектори їх кінетичних моментів) і два
акселерометри Аξ
і Аη
по осям виміру ξ,
η,
які взаємно перпендикулярні. ГСП
підвішена в кардановому підвісі. При
цьому вісь ,Х
зовнішньої рами підвісу збігається з
поздовжньою віссю ЛА, вісь внутрішньої
рами горизонтальна, а вісь платформи
вертикальна. Осі ξ
і
η
ГСП можуть займати в азимуті довільне
положення відносно осей X
і Z
ЛА.
Вони
можуть бути спрямовані як на північ і
схід, так і по осях обраної ортодромічної
системи, координат. Стабілізацію ГСП
в азимуті виконує гіроскоп Г2, а в площині
обрію - гіроскопи Г1 і ГЗ. Якщо вимірююча
вісь ξ
гіроплатформи орієнтована уздовж
меридіана (на північ), а вісь η
уздовж паралелі (на схід) то після
інтегрування (1/р)
сигналів
акселерометрів і додавання з початковими
значеннями швидкостей Vη0
і
Vξ0
отримаємо північну (VξΣ)
і
східну (VηΣ,)
складові шляхової швидкості польоту.
Швидкість VξΣ
множиться на коефіцієнт К
що забезпечує на датчику моментів М3
коригувальний
момент. (14.8) до швидкості VξΣ
додається сигнал -R3Ωcos(φ)
для компенсації горизонтальної
складової кутової швидкості Землі.
Сумарний
сигнал після множення на величину К
у вигляді (14.9) подається на датчик
моментів М1.
У результаті виходить незбуджуюча
гіровертикаль.
Якщо осі ξ і η ГСП утворять з осями географічної, системи координат деякий кут Ψ, то через обертання Землі обидві осі ГСП. будуть відхилятися від плоскості обрію. У цьому випадку для стабілізації гіроплатформи у площині обрію й забезпечення незбудження ГСП необхідно подавати на датчик моменту МЗ коригувальний момент
![]()
а на датчик моменту М1 коригувальний момент
![]()
На датчик моменту М2 подається коригувальний момент, пропорційний вертикальній складовій кутової швидкості обертання Землі Ωcos(φ) для компенсації відходу ГСП у азимуті через обертання Землі.
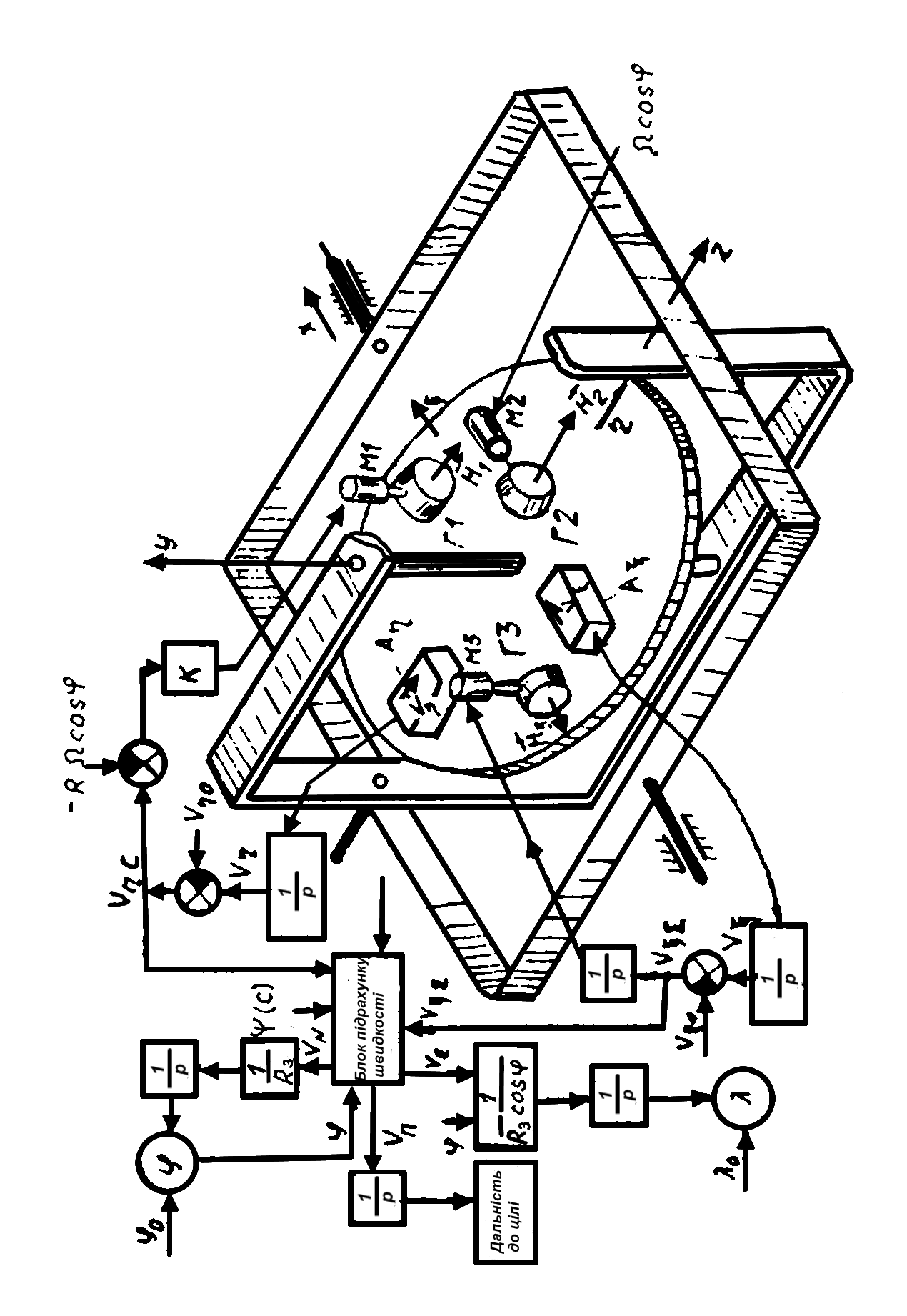
Рис. 14.9
У блоці обчислення швидкостей по значенню кута Ψ виконується перерахунок складових шляхової швидкості ЛА VξΣ і VηΣ на осі географічної системи координат. На виході блоку в кожен момент часу є значення північної VN і східної VE складової шляхової швидкості. По цих складових обчислюється шляхова, швидкість літака. Складові VN і VE діляться відповідно на R3 і R3cos(φ) після інтегрування (1/р) результатів розподілу на покажчиках координат виходять поточні значення широти φ і довготи λ, місцезнаходження ЛА. Початкові значення φ0 і λ0 вводяться в покажчики вручну. Шляхова швидкість Vп інтегрується й подається на індикатор дальності, на якому в кожну мить фіксується пройдений шлях або поточна дальність до цілі.
Процес передполетної орієнтації осей ГСП по напрямку осей навігаційної системи координат й установки в площину обрію прийнято називати початковою виставкою ІСН. Установка ГСП у площину обрію (обріювання) не пов'язана з будь-якими технічними труднощами й виконується в усіх ІСН по сигналах акселерометрів. При цьому вихідні сигнали акселерометрів подаються на моментні датчики гіроскопів, гіроскопи прецесують і повертають платформу доти, поки вона не встановиться в площину обрію. Такий метод обвіювання дозволяє за 2-3 хвилини виставки забезпечити точність установки в обрій не гірше 1-5 кутових хвилин.
Для здійснення початкової виставки ІСН в азимуті (по курсу), тобто, для узгодження осей ГСП із напрямком, навігаційних осей, можна використати метод виставки, що дозволяє допомогою наявних на ГСП акселерометрів й, гіроскопів автономно виконувати цю операцію. Такий метод початкової виставки називається гірокомпасуванням. Фізична сутність гірокомпасування полягає у визначенні й компенсації відходів ГСП, що з'явилися через вплив на гіроскопи ІСН горизонтальної складової кутової швидкості обертання Землі при розбіжності напрямку осей ГСП із навігаційними осями.
Розрізняють два основних види гірокомпасування:
-
гірокомпасування із приведенням осей ГСП до навігаційних осей (фізичне гірокомпасування);
-
гірокомпасування, при якому визначається кут неузгодженості між осями ГСП і навігаційними осями без їх узгодження (розрахункове гірокомпасування).
Точність початкової виставки методом гірокомпасування залежить від географічної широти місця базування точнісних характеристик гіроскопів і тривалості виставки. Наприклад, на широті 50˚ точність азимутальної виставки в 10 кутових хвилин при дрейфі гіроскопів 0,1˚/год досягається приблизно за 15 хвилин. Для підвищення точності виставки (або скорочення часу виставки) може бути використаний метод геодезичної прив'язки або метод виставки по стояночному курсі ЛА.
Виставка ИСН методом геодезичної прив'язки висуває певні вимоги до розташування ЛА на стартовій позиції й геодезичній підготовці цієї позицій Для забезпечення необхідної точності, визначення вихідної інформації для азимутальної виставки ЛА повинен установлюватися на стартової позиції ЛА, щоб проекція точки розміщення ГСП збігалася з точністю не гірше ±1 м з геодезичною точкою, для якої відомі географічні координати, і визначені азимути декількох орієнтирів. Геодезична точка, над якою встановлюється ГСП, повинна бути відзначена ясно видимим, перехрестям. Географічні координати ЛА до перехрестя повинні бути визначені з точністю не нижче одиниць кутових секунд. Перед цією геодезичною точкою повинний бути передбачений вільний простір у радіусі не менш 100 м. На відстані не менш 1 км від перехрестя необхідно мати трохи чітко видимих нерухомих орієнтирів. З кожної геодезичної точки (перехрестя) повинні бути визначені азимути обраних орієнтирів з точністю не гірше ±3 кутових хвилин. Інформація про азимутальну орієнтацію ГСП (або ЛА в цілому) отримується у процесі оптичного візирування відомих орієнтирів за допомогою теодоліту, попередньо оптично прив'язаного до ГСП (або до ЛА).
Час, необхідний для виставки, становить 15-35 хвилин. Точність - не гірше 3-5 кутових хвилин.
Виставки по стояночному курсу ЛА припускає знання точного стояночного курсу ЛА. При цьому ГСП виставляється тільки по азимуту відносно ЛА. Стояночний курс ЛА може бути визначений пеленгацією за допомогою візирного приладу (теодоліта) спеціального відлікового пристрою, встановленого на фюзеляжі ЛА. Теодоліт повинен встановлюватися у місці, для якого з геодезичною точністю визначене положення географічного меридіана. При цьому відпадає необхідність у геодезичній підготовці стоянок та необхідність виводу ЛА на спеціальне місце виставки. Відліковий пристрій повинен встановлюватися по поздовжній осі ЛА з максимально можливою точністю. Стояночний курс ЛА може бути визначений також пеленгацією paдіомаяків. На борті ЛА повинні бути радіосистема, що визначає азимут, і пристрій, що обробляє значення азимута та дальності. Точність виставки ИСН по стояночному курсу ЛА визначається точністю визначення .азимута ЛА.
Основними джерелами похибок ИСH у цілому є:
- погрішність датчиків первинної інформації (акселерометрів та гіроскопів);
- погрішності введення початкових даних і початкової виставки ГСП;
- погрішності алгоритму розв'язання рівняння навігації й похибки обчислювача.
У реальних умовах елементи ИСН мають похибки, що викликають помилки у визначенні швидкості й пройденої відстані. Якщо акселерометр має похибку виміру прискорень Δα, то помилки у визначенні швидкості польоту ΔV і пройденої відстані ΔS будуть відповідно рівні
![]() ;
; ![]() (14.10)
(14.10)
На рис. 14.10, а показаний закон зміни похибки визначення координат місця Δα через помилку акселерометра. Кутова координата пов'язана із пройденою відстанню виразом
![]()
При наявності постійної похибки β в площині обрію (див рис. 14.9) похибки ИСН визначаються співвідношеннями
![]() ;
;
![]() (14.11)
(14.11)
Звідси видно, що через постійну помилки стабілізації ГСП похибка у вимірі координати має той же період коливань (84,4 хв.), а середнє значення Δαср=β (рис. 14.10, б).

Рис. 14.10
Помилки початкової виставки ГСП в азимуті викликають складні коливання вертикалі, що складаються з гармонік з частотою, пропорційною кутовій швидкості обертання Землі Ω, і із частотою Шулера:
![]() ;
;
![]() ,
,
де Ω - кутова швидкість обертання Землі, ΔА - помилка початкової виставки ГСП в азимуті.
Помилки у визначені швидкості й пройденої відстані виникають також через наявність дрейфу азимутального гіроскопу.
Ці помилки відповідно рівні
![]() ;
;
![]() ,
,
де ωдр - швидкість дрейфу азимутального гіроскопа.
Таким чином, забезпечити високу точність роботи ИСН можна при умові застосування елементів, що мають високі точністні характеристики (акселерометрів, гіроскопів, обчислюючих пристроїв). Для зменшення помилок ИСН можна вводити корекцію від зовнішніх джерел інформації.