

1.Призначення й класифікація автоматичного устаткування систем керування польотом літальних апаратів.
Керування польотом здійснюється впливом на органи керма ЛА. В умовах розширення режимів польоту, а також посилення вимог до точності керування польотом більшість бойових завдань може бути успішно вирішено тільки при наявності автоматичного устаткування систем керування.
На сучасних ЛА бортові автоматичні системи керування є не тільки засобами, що полегшують льотчикові процес керування польотом, але й засобами підвищення ефективності й рівня безпеки польотів.
На автоматичне устаткування систем керування покладають наступні найбільш характерні функції:
1) Забезпечення необхідних пілотажних характеристик ЛА. Ця функція містить у собі підлеглі функції:
-
підтримка необхідної керованості ЛА при його пілотуванні льотчиком за рахунок автоматичної зміни характеристик завантаження органів керування в кабіні й передатні відношення проводки керування в залежності від режимів польоту;
-
демпфірування кутових коливань ЛА;
-
збільшення стійкості ЛА.
2) Стабілізація режиму польоту. Залежно від стабілізуючого параметра розрізняють:
-
стабілізацію кутового положення ЛА;
-
стабілізацію висоти польоту;
-
стабілізацію швидкості польоту і т. д.
3) Автоматизація траєкторного керування. Ця функція відрізняється від попередніх більше високим рівнем розв'язуваних завдань. Тут потрібен вивід ЛА в певну точку простору або здійснення руху ЛА по визначеній траєкторії. У деяких випадках здійснюється автоматизація маршрутного польоту, повернення
на аеродром посадки, заходу на посадку і т.д.
-
Програмне маневрування. Ця функція відрізняється від траєкторного керування тим, що здійснюється шляхом заздалегідь запрограмованих відхилень органів керування ЛА, наприклад, при маневрах перед атакою цілі або маневрах, що виконуються безпосередньо після атаки цілі.
-
Автоматизація бойового застосування. Функція полягає в виконанні команд комплексів, що забезпечують рішення завдань бойового застосування ЛА (прицільного комплексу або розвідувального комплексу). Можлива взаємодія бортової системи автоматичного керування з наземними засобами вказівок цілі і наведення.
Залежно від ступеня участі льотчика й автоматичних систем у процесі керування польотом ЛА розрізняють наступні види керування: ручне (штурвальне), напівавтоматичне (директорне) і автоматичне.
Ручне керування здійснюється льотчиком, що використовує показники приладів і візуальне орієнтування. Опрацювавши отриману інформацію, льотчик управляє ЛА шляхом впливу на органи керування через систему штурвального керування (СШК). У цю систему поряд з важелями керування, механічною проводкою, завантажувальними механізмами можуть входити автоматичні підсистеми, що забезпечують стійкість і керованість ЛА.
До підсистем СШК відносяться: автомати регулювання керування (АРК), автомати завантаження ручки керування й обмежень ходу важелів керування, автомати демпфірування (демпфери), автомати безпеки або обмеження граничних режимів системи гасіння аеропружніх коливань, а також різноманітні системи дистанційного керування.
Ручне керування використається на найбільш складних і відповідальних етапах польоту, а також при відмовах автоматичної системи керування.
При напівавтоматичному керуванні польотом льотчик звільнений від необхідності визначення необхідних впливів на органи керування по показниках великої кількості приладів приладів. Визначник траєкторного керування розраховує потрібне значення керуючих впливів.
Сигнали, пропорційні потрібним відхиленням органів керування, подаються на стрілки командного приладу. Установлюючи командні стрілки в нейтральне положення, льотчик забезпечує тим самим рівність поточних і заданих значень параметрів керування, тобто політ ЛА по заданій траєкторії.
Таким чином, при напівавтоматичному керуванні роль льотчика зводиться до контролю положення командних стрілок і відхиленні органів керування. При цьому підвищується точність керування на складних і відповідальних етапах польоту, таких, наприклад, як, захід на посадку, політ на малих висотах та ін.
Автоматичне керування здійснюється системою автоматичного керування (САК) без участі або під контролем льотчика. Автоматичне керування забезпечує найбільшу швидкодію, точність й ефективність пілотування ЛА на таких складних етапах польоту, як політ по маршруту, наведення на
повітряні й наземні цілі, політ на малих висотах, повернення на
аеродром і захід на посадку та ін.
З залежності від рівня автоматизації процесу керування ЛА автоматичні системи керування можна поділити на автопілоти (АП), системи автоматичного керування (САК), пілотажні системи" (ПС) і пілотажно-навігаційні комплекси (ПНК).
1.1 Літак, як об'єкт керування.
Принципи керування.
Літак в повітрі можна вважати твердим тілом, рух якого відбувається під дією сил, що прикладені до нього, і моментів. Звичайно повний, просторовий рух літака розділяють на два рухи: повздовжній і боковий, кожен із яких в свою чергу можна розглядати складеним із двох складових: руху центру мас і руху (обертання) навколо центру мас.
Із другого закону механіки відомо, що якщо сили, що діють на тіло, урівноважені (тобто їхня сума дорівнює нулю), то центр мас здійснює рівномірний прямолінійний рух. Тому, якщо ми хочемо управляти вектором швидкості літака, а отже, і траєкторією його руху, то необхідно створювати керуючі сили.
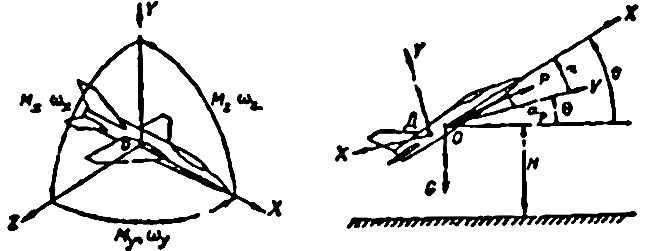
Із цього ж закону механіки для обертового руху слідує: якщо врівноважені діючі на тіло моменти, то його обертання навколо центра мас або відсутнє, або відбувається з постійною кутовою швидкістю. Тому, для зміни кутового положення літака необхідно створювати керуючі моменти. Обертання літака зазвичай розглядається навколо осей зв'язаної системи координат 0ХУ2, (рис. 1). Початок цієї системи координат розташований в центрі мас літака. Моменти відносно зв'язаних осей прийнято називати в таким чином: Мх - момент крену, Му - момент нишпорення, або шляховий момент, Мг — повздовжній момент.
Керування
повздовжнім рухом. Основними
параметрами поздовжнього руху ( що
відбувається у вертикальній площині)
є (рис. 2): висота Н, повітряна швидкість
V,
кут
нахилу траєкторії θ, кут тангажу υ і кут
атаки
![]() .
На
літак діють чотири сили: сила ваги G,
сила
тяги двигуна Р, піднімальна сила Y
и
сила лобового опору X.
Сили
G
і
Р
будемо
вважати прикладеними до центру мас О
ЛА, а аеродинамічні сили Y
и X
- до
точки, названої центром тиску Д.
.
На
літак діють чотири сили: сила ваги G,
сила
тяги двигуна Р, піднімальна сила Y
и
сила лобового опору X.
Сили
G
і
Р
будемо
вважати прикладеними до центру мас О
ЛА, а аеродинамічні сили Y
и X
- до
точки, названої центром тиску Д.
Всі ці сили змінюються в процесі польоту, однак для цілеспрямованого керування рухом використовуються головним чином дві: тяги двигуна й піднімальна сила. Далі ми не будемо розглядати керування тягою двигуна, вважаючи швидкість польоту постійною. Знехтуємо також кутом αр і будемо вважати, що вектор тяги Р спрямований по вектору
|
Рис. 1. Додатні напрямки осей кутових швидкостей обертання і моментів на літак.
|
Рис. 2. Параметри повздовжньої зв'язаної системи координат, руху схемі сил, що діють на літак.
|
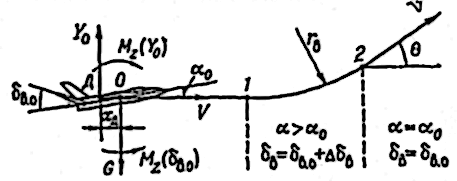
Рис. 3. Процес керування повздовжнім рухом.
швидкості V. Зміну піднімальної сили можна здійснити зміною кута атаки ЛА, а для цього необхідно за рахунок відхилення руля висоти повернути літак навколо поперечної осі OZ.
Розглянемо
процес керування ЛА, вважаючи вихідним
режимом, горизонтальний політ на
постійній висоті (рис. 3). У цьому режимі
рівновага сил досягається за рахунок
створення кута атаки горизонтального
польоту α![]() і відповідної цьому куту атаки
піднімальної сили Yо=G,
а
також рівності сили тяги й сили лобового
опору. Для забезпечення рівноваги
повздовжніх моментів велике значення
має взаємне положення піднімальної
сили й сили ваги. Звичайно центр ваги
розташований поперед центра тиску на
відстані х
і відповідної цьому куту атаки
піднімальної сили Yо=G,
а
також рівності сили тяги й сили лобового
опору. Для забезпечення рівноваги
повздовжніх моментів велике значення
має взаємне положення піднімальної
сили й сили ваги. Звичайно центр ваги
розташований поперед центра тиску на
відстані х![]() .
У
цьому
випадку піднімальна сила створює
обертаючий момент Мг(Y0)
= YоХд,
що компенсується відхиленням руля
висоти в балансувальне положення δВ.0
й тим самим створенням моменту
Мг(δВ.0)=Мг(Yо).
Відхилення
руля
висоти щодо балансувального положення
будемо позначати ΔδВ.
.
У
цьому
випадку піднімальна сила створює
обертаючий момент Мг(Y0)
= YоХд,
що компенсується відхиленням руля
висоти в балансувальне положення δВ.0
й тим самим створенням моменту
Мг(δВ.0)=Мг(Yо).
Відхилення
руля
висоти щодо балансувального положення
будемо позначати ΔδВ.
Нехай
тепер у точці 1 льотчик відхилив кермо
висоти на деякий додатковий кут догори;
при цьому виникає керуючий момент
М![]() (ΔδВ)
і
літак, обертаючись навколо осі OZ
(ΔδВ)
і
літак, обертаючись навколо осі OZ![]() ,
збільшує
кут атаки відносно кута атаки
горизонтального польоту α
,
збільшує
кут атаки відносно кута атаки
горизонтального польоту α![]() .
За рахунок надлишку піднімальної сили
(Y>G)
літак
набирає висоту по криволінійній
траєкторії (дузі з радіусом rв).
Якщо в деякий момент цього руху (точка
2)
забрати
кермо висоти назад у балансувальне
положення, кут атаки встановиться у
вихідне положення α
.
За рахунок надлишку піднімальної сили
(Y>G)
літак
набирає висоту по криволінійній
траєкторії (дузі з радіусом rв).
Якщо в деякий момент цього руху (точка
2)
забрати
кермо висоти назад у балансувальне
положення, кут атаки встановиться у
вихідне положення α![]() ,
рівновага моментів відновиться й літак
буде набирати висоту з постійним кутом
θ, тобто прямолінійно.
,
рівновага моментів відновиться й літак
буде набирати висоту з постійним кутом
θ, тобто прямолінійно.
Керування бічним рухом. Строго кажучи, бічний рух - це рух в площині крила, однак ми для спрощення будемо вважати вихідним режимом політ з нульовим креном і будемо розглядати бічний рух що проходить в горизонтальній площині.
Основними параметрами бічного руху є наступні кути: шляховий кут Ψ і курс - ψ, що відраховуються від напрямку на північ, кут крену γ і кут ковзання β (рис. 4). Для того, щоб забезпечити маневр ЛА в горизонтальній площині, тобто розгорнути вектор швидкості на нове значення шляхового кута, для ЛА зі звичайними органами керування існують два способи. У першому з них, що називається плоским розворотом (рис. 4,а), необхідно, управляючи кермом напрямку, повернути, наприклад, вправо повздовжню вісь і створити кут ковзання β<0. Виникла за рахунок кута ковзання бічна сила Z, вона забезпечить розворот вектора швидкості й викривлення траєкторії з радіусом rг.
Для сучасних літаків цей тип розвороту застосовується рідко, тому що ковзання небажано через погіршення обтікання літака, і до того ж створювані при ковзанні бічні сили досить невеликі.
Більше ефективним і тому більше розповсюдженим являється другий спосіб, що називається розворот із креном (рис. 4,6). Тут керування відбувається в такий спосіб: льотчик, відхиляючи елерони, створює момент навколо поздовжньої осі, і літак починає обертання по крену, наприклад, вправо. При досягненні потрібного кута крену льотчик забирає елерони в нейтральне положення й рух по крену припиняється. Виникла при γ≠0 горизонтальна складова піднімальної сили Ysinγ викликає зміну шляхового кута Y і викривлення траєкторії польоту по дузі з радіусом rг, При повороті вектора швидкості V виникає кут ковзання β>0, що створює шляховий момент Му(β). Цей момент викликає розворот поздовжньої осі літака, тобто відбувається зміна курсу ψ вслід за зміною шляхового кута Ψ.
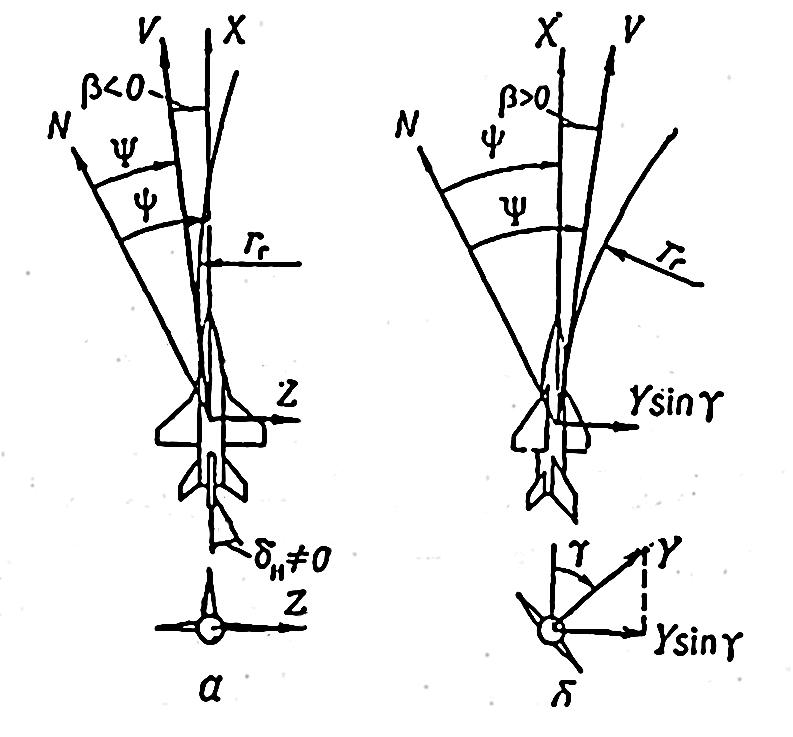
Рис. 4. Процес керування бічним рухом : а - плоский розворот; б - розворот із креном
Поняття про стійкість і керованість. Вище ми розглянули основні принципи керування ЛА, не зачіпаючи питань якості процесів керування. Ці процеси визначаються властивостями ЛА як об'єкта керування, головними з яких є його стійкість і керованість.
Під стійкістю літального апарата розуміють його здатність зберігати заданий режим польоту при дії збурювань, а під керованістю- змінювати його при відхиленні органів керування. Із цих визначень слідує, що стійкість і керованість ЛА тісно зв'язані між собою й у відомій мері суперечливі.
Надмірно стійким ЛА управляти важко, він погано слухається рулів, і для здійснення маневру потрібні більші відхилення органів керування. З іншого боку, нестійкий ЛА або ЛА з малою стійкістю вимагає точної й швидкої реакції льотчика, тобто літак дуже строгий у керуванні й пілотування його також складно, а іноді й неможливо.
Сучасні надзвукові ЛА не на всіх режимах польоту мають прийнятними для льотчика характеристиками керованості.
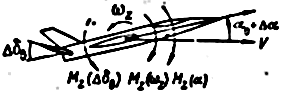
Рис.6. Утворення моменту повздовжньої статичної стійкості по куту атаки
Характеристики стійкості й керованості ЛА можуть бути істотно поліпшені завдяки застосуванню автоматичних систем. Однак перш ніж розглядати їх будову, необхідно усвідомити фізичну природу стійкості й керованості ЛА, що визначається головним чином його аеродинамічними моментами. Ці моменти викликаються аеродинамічними силами крила, фюзеляжу, оперення й кермових поверхонь, які у свою чергу залежать від обтікання цих поверхонь повітряним потоком, тобто кутів атаки й ковзання й режиму польоту. Так, наприклад, піднімальна сила крила визначається наступної виразом:
Y=αSqсуа
де α - кут атаки крила; q=ρV2/2 — швидкісний напір; суа - аеродинамічний коефіцієнт; S- площа крила.
Аналогічними виразами визначаються й інші аеродинамічні сили, причому у формулі для бічних сил замість кута атаки фігурує кут ковзання.
Найбільший вплив на стійкість літака роблять моменти статичної стійкості по кутах атаки й ковзання. Вони називаються так тому, що для стійкого літака прагнуть усунути виниклі з якої-небудь причини кути таки й ковзання.
Розглянемо природу виникнення моменту поздовжньої стійкості по куту атаки. На рис. 6 зображений літак, що робить горизонтальний політ зі швидкістю V. Нехай під дією якого-небудь збурювання (наприклад, пориву вітру) кут атаки збільшився на величину Δα. Через збільшення кута атаки з'явиться додаткова піднімальна сила ΔY, прикладена в точці, що названа фокусом по куту атаки. Ця точка близька до центра тиску (рис. 2), але, строго кажучи, не збігається з ним. У літака на рис.6 центр мас розташований на, відстані Хa поперед фокуса, тобто літак має так зване переднє центрування. У цьому випадку поява АУ викликає момент статичної стійкості Мz (α) =ΔУх, спрямований на пікірування. Під дією цього моменту ніс літака опускається, а кут атаки зменшується, що відповідає статичній стійкості по куту атаки. Неважко переконатися, що при розташуванні центра мас за фокусом ЛА буде нестійким і виникле з якої-небудь причини мала зміна кута атаки через, наявність моменту, Мz (α) буде надалі наростати.

Рис. 6. Визначення моменту шляхової стійкості.
Аналогічно утвориться момент шляхової стійкості. Тут при виникненні кута ковзання (рис. 6) з'являється аеродинамічна бічна сила Z головним чином за рахунок вертикального оперення. Будучи прикладена звичайно за центром мас, сила Z створює момент МУ(β) =Zlz що прагне усунути ковзання, тобто літак у цьому випадку аналогічний флюгеру, що встановлюється по потоці повітря.
При маневруванні ЛА в повітрі, крім моментів статичної стійкості утворюється ще одна група моментів, які називаються демпфуючими. На відміну від моментів статичної стійкості вони залежать не від загальних кутів атаки й ковзання всього ЛА, а від зміни місцевих кутів обтікання потоком різних аеродинамічних поверхонь літака, що відбувається при обертанні літака навколо зв'язаних осей. Ці моменти по своєму впливу на ЛА схожі на моменти густого тертя, тому що пропорційні кутовим швидкостям обертання й завжди спрямовані проти обертання.
Розглянемо природу утворення поздовжнього демпфуючого моменту, що позначається Мz{ωz }. Нехай при обертанні літака щодо осі 0Z, стабілізатор опускається, (рис. 7). При цьому кут атаки (Δαс>0) і піднімальна сила стабілізатора ΔYс зростають пропорційно кутової швидкості обертання ш2 (швидкості опускання стабілізатора ΔVc), що викликає появу моменту, що демпфірує, Мz(ωz) =ΔYСLС. Цей момент перешкоджає обертанню ЛА і прагне погасити кутову швидкість обертання ωz
Розглянемо процес керування ЛА з урахуванням взаємодії моментів статичної стійкості що демпфірують і керуючих моментів що викликані відхиленням кермових поверхонь.
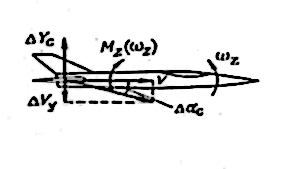
Рис. 7. Виникнення демпфіруючого моменту по кутовій швидкості тангажу
Для прикладу обмежимося поздовжнім керуванням. Нехай у вихідному збалансованому положенні літака льотчик відхилив кермо висоти на величину Δδв, на кабрирування (рис. 8). Це викликає керуючий момент Мz(Δδв), під дією якого ЛА починає обертатися навколо осі 0Z і збільшувати кут атаки. З'являється момент статичної стійкості Мz(α) і момент, що демпфірує, Мz (ωz), які спрямовані проти обертання. У процесі збільшення α і ωz наступає така ситуація, коли сума моментів Мz(α) і Мz (ωz) урівноважує момент руля висоти Мz(Δδв)
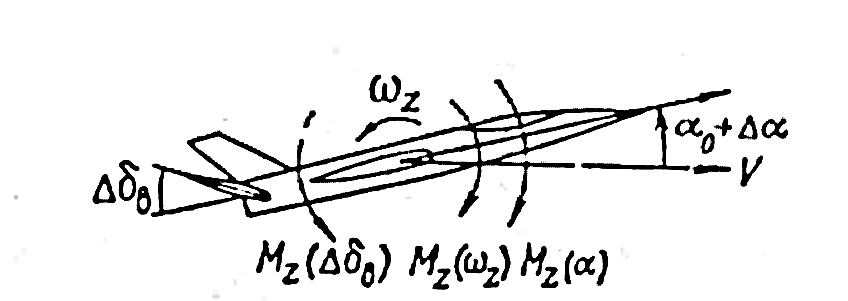
Рис 8. Рівновага повздовжніх моментів при маневрі літака
Наростання кута атаки припиняється, і ЛА буде здійснювати сталий вертикальний маневр із параметрами а ωZуст. При цих здійснювати міркуваннях ми не враховували момент інерції ЛА, наявність якого приводить до коливального процесу встановлення параметрів α уст і ωZуст, причому в ряді випадків ці коливання досить значні й заважають льотчику управляти ЛА.
Розглянутий вище процес зміни кута атаки ЛА добре характеризує аеродинаміку ЛА, але для опису величини маневру літака й відчуттів льотчика при цьому маневрі кращим параметром є, не кут атаки, а
зв'язане з ним збільшення піднімальної сили ΔY або нормального перевантаження:
![]()
Досвід льотної експлуатації виробив цілком певні вимоги до керованості літака, які формулюються для повздовжнього руху через параметри перехідного процесу зміни перевантаження при східчастому відхиленні льотчиком важеля керування, а саме (рис. 9, крива 1): час наростання перевантаження t, перерегулювання або максимальний викид 1 (%) щодо сталого значення, приросту перевантаження ΔпYуст при певній керуючий дії льотчика.
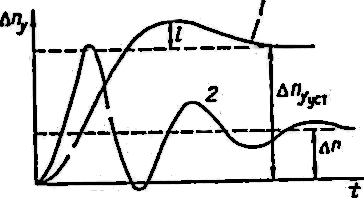
Рис 9. Перехідний процес по перевантаженню при відхиленні руля висоти
Так, для гарної повздовжньої керованості легкого ЛА необхідно, щоб час наростання перевантаження до нового значення дорівнювало приблизно 1с, а 1 не перевищувало 10- 15%. Іноді замість 1 указується число коливань навколо сталого положення, що не повинне бути більше 2.
Однак всі керування, що беруть участь у процесі, аеродинамічні сили й моменти істотно залежать від режиму польоту, що приводить до незадовільної керованості на ряді режимів по висоті й швидкості польоту. Проаналізуємо ці залежності, попередньо записавши аеродинамічні моменти через прийняті в аеродинаміці безрозмірні коефіцієнти, тобто в наступному вигляді:
Мz(α) = mαzΔαqSbα; (3)
Мz (ωz) = mωzzωzqSbα; (4)
Мz(Δδв) = mδzΔδвqSbα, (5)
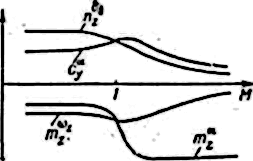
де mαz, mωzz, mδz, — безрозмірні коефіцієнти моментів; q - швидкісний напір; S — площа крила; bα — хорда крила; ωz — безрозмірна кутова швидкість. Аналогічний безрозмірний коефіцієнт сαу був введений і для опису залежності піднімальної сили від кута атаки (дивись формули (1) і (2)). На рисунку 10. показані безрозмірні аеродинамічні коефіцієнти надзвукового ЛА. Вказані коефіцієнти сил і моментів залежать від числа М польоту (рис. 10). Пояснимо деякі із цих залежностей, попередньо помітивши, що для стійкого ЛА коефіцієнти mαz, mωzz від'ємні.
При переході через швидкість звуку (М = 1) коефіцієнт mαz сильно збільшується, що зв'язано з різким зміщенням назад центру тиску і аеродинамічного фокусу ЛА. При цьому на режимах М > 1 повздовжня статична стійкість дуже велика.
Коефіцієнт ефективності руля висоти mωzz, навпаки, на надзвукових швидкостях суттєво зменшується через погіршення обтікання потоком стабілізатора і руля висоти, а також внаслідок деформації конструкції літака. Коефіцієнти сαу і mωzz мають невеликий максимум в районі М = 1, а потім по мірі збільшення М також зменшуються.
ОСНОВНІ ПРИНЦИПИ ФОРМУВАННЯ ЗАКОНІВ КЕРУВАННЯ ПОЛЬОТОМ ЛА
Положення ЛА в просторі може бути визначено шістьма координатами, три з яких характеризують положення його центра мас, а три інші визначають положення ЛА при русі навколо центру мас.
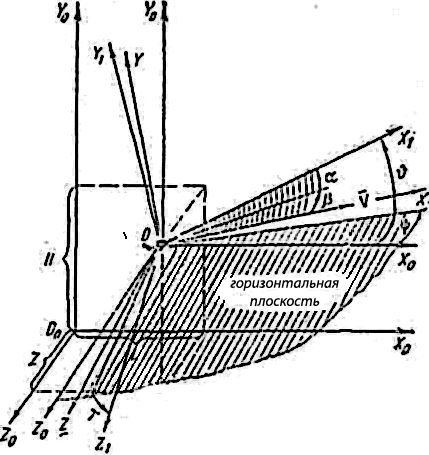
Рис. 1. Системи координат
При цьому робиться допущення, що ЛА являє собою тверде тіло.
Положення центра мас задається в земній системі координат 00Х0Y0Z0 (рис. 8.1) висотою польоту Н, дальністю X і бічним відхиленням Z. Осі цієї системи координат розташовуються так, що 00Y0 спрямовано вертикально нагору, О0Х0 — у заданому напрямку польоту, а О0Z0 утворює із ними праву систему.
Однак рух центра мас ЛА залежить в остаточному підсумку від його кутового положення відносно центра мас. Кутові рухи ЛА розглядаються в системі координат, початок який поміщено в його центрі мас.
Пов'язані з ЛА системи координат можуть мати різний напрямок осей. Для аналізу кутових рухів ЛА користуються наступними системами (рис 1):
1. Зв'язана «нерухома» система координат ОХ0Y0Z0. Має початок у центрі мас ЛА, а її осі паралельні осям земної системи О0Х0Y0Z0.
2. Зв'язана рухлива система координат ОХ1Y1Z1 початок якої також перебуває в центрі мас ЛА, вісь ОХ1 спрямована вперед по поздовжній осі ЛА, вісь ОY1 - догори (лежить у площині симетрії), вісь ОZ1, в сторону правого крила.
3. Швидкісна система координат ОХYZ. Вісь ОХ цієї системи збігається з напрямком вектора повітряної швидкості V, вісь ОY лежить у площині симетрії ЛА, а вісь 0Z утворює із ними праву систему.
Кутовими координатами ЛА є:
- кут тангажа υ, утворений поздовжньою віссю ЛА й горизонтальною площиною при повороті навколо осі
- кут рискання φ, між проекцією поздовжньої осі ЛА на горизонтальну площину й віссю ОХ0, отриманий при повороті навколо осі ОY1;
- кут крену γ, утворений віссю ОZ1 і горизонтальною площиною при повороті ЛА навколо поздовжньої осі.
Зазначені кутові координати ЛА визначаються взаємним положенням систем ОХ0Y0Z0 й ОХ1Y1Z1. Положення швидкісної системи координат ОХYZ відносно ОХ1Y1Z1задається кутами атаки й ковзання. Кут атаки α утворюється проекцією вектора повітряної швидкості на вертикальну площину симетрії ЛА і його поздовжньою віссю, а кут ковзання β - вектором швидкості й площиною симетрії ЛА. Кут між горизонтальною площиною й вектором швидкості називається кутом нахилу траєкторії. Він позначається буквою θ і дорівнює різниці між кутами тангажу й атаки: θ = β - α. Позитивний напрямок відліку кутових координат ЛА показане на рис. 1 стрілками.
Зміна положення ЛА в просторі характеризується кутовими швидкостями повороту навколо осей ОХ1—>ωx , ОУ1—>ωy.
Рух ЛА в нерухомій вертикальній площині, зв'язаний зі зміною кутів тангажу й атаки (поворот навколо осі ОZ1), називається повздовжнім, а рух, супроводжуваний зміною кутів крену, нишпорення й ковзання (поворот навколо осей ОХ1 й ОY1), — бічним. Аеродинамічні властивості ЛА такі, що поздовжній і бічний рухи з достатнім ступенем точності можуть розглядатися роздільно й незалежно один від одного.
Кутові координати, що визначають положення ЛА в просторі, можуть змінюватися як під дією зовнішніх збурювань, так і у результаті навмисних дій льотчика в процесі керування ЛА.
Розглянемо найбільш простий випадок керування польотом ЛА - стабілізацію його положення по куту тангажа.
Нехай за якихось причин почалося мимовільне відхилення ЛА по куту тангажа від заданого положення - υ= 0 (рис. 2.). Припустимо, що система керування ЛА реагує тільки на величину кута відхилення, тобто
υ в = К υ в υ, (1)
де υ в — відхилення руля висоти;
К υ в - коефіцієнт пропорційності (передаточне число) між відхиленням руля й кутом тангажу; υ - кут тангажу.
Математичне вираження, що визначає зв'язок між відхиленням керуючого органа ЛА й керуючими сигналами, називається законом керування.
Формула (1) є законом керування по відхиленню. Відповідно до цього закону керування пропорційно зміні кута тангажа ЛА буде відхилятися кермо висоти в напрямку створення моменту, що прагне повернути ЛА в початкове положення. Через наявність сил інерції ЛА при досягненні вихідного положення не зупиниться, буде продовжувати рух у бік, протилежний початковому відхиленню. Далі процес повториться, а при нестійкому ЛА відхилення будуть розбіжними. Зміна коефіцієнта К^в міняє характер коливань, але не забезпечує їхню ліквідацію.
Радикальним засобом поліпшення якості перехідного процесу при керуванні кутовими рухами ЛА є введення в закон управління сигналу по кутовій швидкості навколо відповідної осі. У розглянутому випадку необхідно ввести кутову швидкість ωz; тоді закон керування прийме вигляд
υ в = Кυвυ + Кωz вωz, (2)
де Кωz в - передатне число по ωz.
Введення сигналу по кутовій швидкості приводить до того, що з появою відхилення ЛА по тангажу відхилення руля відбувається під дією двох сигналів— Кυвυ і Кωz в (рис. 3). Більше, ніж при керуванні тільки по υ , відхилення руля висоти не дасть можливості ЛА відхилитися по тангажу на значний кут.
Після припинення наростання кута тангажa сигнал по ωz, стає рівним нулю, а коли ЛА під дією руля почне повертатися у вихідне положення, сигнал Кωz вωz змінює знак.
При підході ЛА до вихідного положення (θ —> 0) змінює знак і сумарний сигнал Кυвυ + Кωz вωz. Це призводить до того, що в момент підходу до заданого положення ЛА кермо висоти виявляється відхиленим у напрямку, протилежному початковому відхиленню, і створює момент, що зменшує кутову швидкість руху ЛА
*,
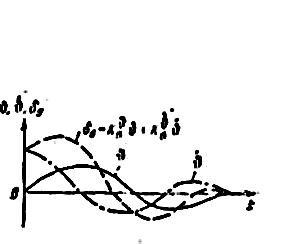
Рис. 3. Перехідний процес при керуванні по відхиленню й кутової швидкості відхилення

Рис. 4. Схема дії сил при крені ЛА
Підбираючи співвідношення сигналів по куту тангажа і кутової швидкості, можна одержати бажану якість перехідного процесу, включаючи й аперіодичний підхід ЛА до заданого положення. Закон керування, що включає сигнали по куту й по швидкості зміни кута, можна вважати мінімально необхідним для одержання якісного перехідного процесу при керуванні ЛА.
Однак при керуванні ЛА канали автопілоту не є автономними й між ними необхідно здійснювати зв'язки, які називаються перехресними. Це обумовлено аеродинамічними властивостями ЛА.
Так, наприклад, при крені ЛА вертикальна складова піднімальної сили Y (рис. 4) не буде врівноважувати масу ЛА, тому що θ = Y >Y'. Щоб ЛА при крені не губив висоту, необхідно відхилити догори кермо висоти, тобто в канал автопілоту, керуючий кутом тангажу, необхідно подати сигнал по куті крену. При цьому як при позитивному (вправо), так і при негативному (уліво) крені кермо висоти варто відхиляти догори, а це значить, що сигнал крену Кγв|γ| потрібно подавати завжди позитивним (по модулю).
Окрім того, при крені ЛА прагне до ковзання убік опущеного крила. Усунути ковзання можна подачею сигналу Кγвγ по куті крену в канал руля напрямку.
При відхиленні руля повороту в плоскому розвороті ЛА через більшу швидкість зовнішнього напівкрила на ньому з'являється приріст піднімальної сили, що викликає момент, що кренить, якому необхідно парирувати за рахунок сигналу Кфеф, що подається із каналу напрямку в канал крену.
Якщо автопілот виконує функцію стабілізації висоти польоту, а це властиво практично всім сучасним автопілотам, то в канал тангажу подається сигнал відхилення від заданої висоти КΔНвН.
Крім зазначених сигналів у кожен канал льотчиком або якою-небудь автоматичною системою (навігаційної, командної й ін.) можуть бути введені сигнали заданих параметрів польоту υз, αз, γз, Hз.
З урахуванням зроблених зауважень закони керування для трьох каналів автопілоту приймають наступний вигляд:
δВ = Кυвυ + Кωz вωz + Кγв|γ| + КΔНвН - Кυзвυз - канал тангажу;
δе = Кγеγ + Кωx eωx + Кфе ψ - Кγзвγз - канал крену;
δH = К ψ H ψ + Кωy Hωy + КγHγ - К ψ H ψ H - канал напрямку.
Однак наведені закони керування не є обов'язковими для всіх автопілотів і режимів польоту ЛА. У законах керування можуть бути відсутні деякі сигнали й можуть бути введені й не зазначені вище сигнали: по інтегралу від відхилення якого-небудь кутового або лінійного параметра, що визначає положення ЛА; по перевантаженню; по відкриттю створок бомболюка й по інших параметрах.
Якщо не потрібно стабілізувати кутове положення ЛА, а є завдання ліквідувати його коливання, то закони керування можуть містити тільки сигнали по кутових швидкостях обертання ЛА щодо його осей ωх, ωу, і ωz. Подібні закони керування мають спеціальні пристрої автоматичного демпфірування коливань ЛА, називані демпферами, або в режимі демпфера може працювати автопілот.