

6.4.8. Процедура синтеза регулятора частотным методом
Обобщая рассмотренные этапы частотного метода синтеза, можно предложить следующую процедуру расчета регулятора.
-
Определяется коэффициент усиления разомкнутой системы
 из условия заданной статической ошибки
из условия заданной статической ошибки
 по соотношению (6.36), а затем вычисляется
коэффициент усиления регулятора
(корректирующего звена)
по соотношению (6.36), а затем вычисляется
коэффициент усиления регулятора
(корректирующего звена)
 .
. -
Строится асимптотическая логарифмическая амплитудная частотная характеристика объекта с учетом рассчитанного коэффициента усиления регулятора
 ,
т. е.
,
т. е.
 .
. -
На основании требований к качеству процессов в замкнутой системе (
 и
и
 )
формируется желаемая ЛАЧХ разомкнутой
системы
)
формируется желаемая ЛАЧХ разомкнутой
системы
 .
. -
Графически вычисляется логарифмическая амплитудная частотная характеристика регулятора согласно соотношению

-
В соответствии с правилом п. 6.4.3 на основе
 восстанавливается передаточная функция
восстанавливается передаточная функция
 ,
а затем записывается передаточная
функция регулятора
,
а затем записывается передаточная
функция регулятора
 .
. -
Анализируется влияние возмущения M(t) и в случае необходимости увеличивается частота среза
 ,
для которой повторяются пп. 3–5 процедуры
расчета регулятора.
,
для которой повторяются пп. 3–5 процедуры
расчета регулятора. -
С целью уменьшения влияния помехи измерения к рассчитанной передаточной функции
 корректирующего звена добавляется
передаточная функция апериодического
звена с малой постоянной времени.
корректирующего звена добавляется
передаточная функция апериодического
звена с малой постоянной времени. -
Предлагается схемная реализация регулятора на активных или пассивных элементах.
Пример 6.7
Для
следящей системы управления одним из
звеньев руки робота из примера 5.2 (рис.
6.13) рассчитать регулятор, который
обеспечивал бы следующее качество
процессов: время установления
![]() ,
перерегулирование
,
перерегулирование
![]() ,
скоростная ошибка
,
скоростная ошибка
![]() .
.
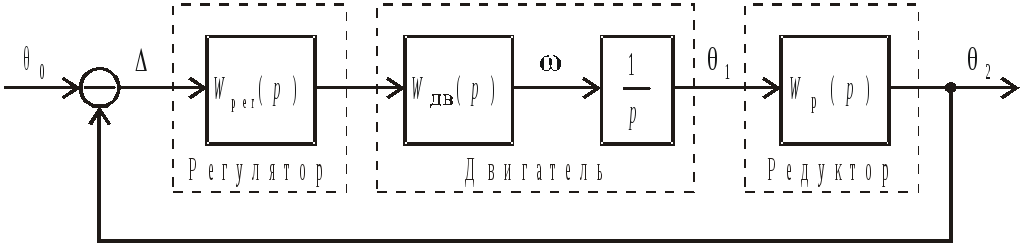
Рис. 6.13. Структурная схема системы управления одним из звеньев руки робота
Здесь
![]() и
и
![]() –
передаточные функции двигателя и
редуктора;
–
передаточные функции двигателя и
редуктора;
![]() – передаточная функция регулятора,
который включает в себя корректирующее
звено
– передаточная функция регулятора,
который включает в себя корректирующее
звено
![]() и усилитель мощности с передаточной
функцией
и усилитель мощности с передаточной
функцией
![]() .
.
При
расчете
![]() коэффициент усиления усилителя мощности
коэффициент усиления усилителя мощности
![]() добавим к передаточной функции объекта,
т. е. будем рас-сматривать
добавим к передаточной функции объекта,
т. е. будем рас-сматривать
![]() .
.
В соответствии с процедурой синтеза определим коэффициент усиления корректирующего звена из условия заданной скоростной ошибки (см. пример 5.2),
![]() .
.
С
учетом численных значений получим
![]() и
и
![]() .
Выберем отсюда
.
Выберем отсюда
![]() .
.
Для
построения асимптотической ЛАЧХ
![]() запишем
запишем
![]() в виде
в виде
![]()
и
определим следующие характерные точки:
![]() =33
дБ;
=33
дБ;
![]() В логарифмическом масштабе
В логарифмическом масштабе
![]() 0,7
дек. Асимптотическая ЛАЧХ
0,7
дек. Асимптотическая ЛАЧХ
![]() приведена на рис. 6.14.
приведена на рис. 6.14.
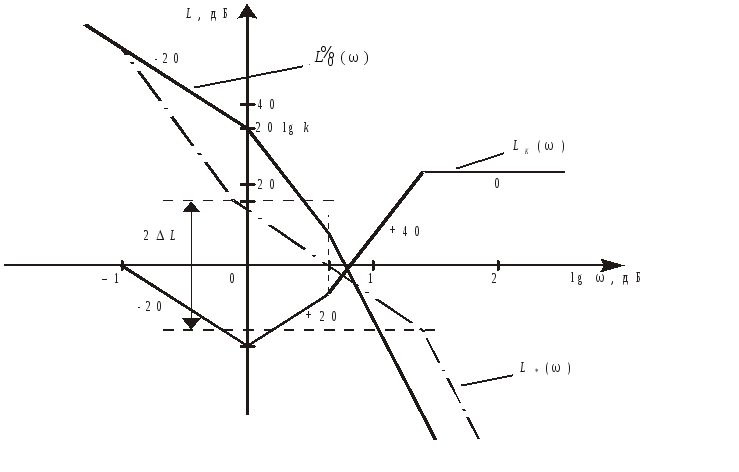
Рис. 6.14. Логарифмические амплитудно-частотные характеристики к примеру 6.7
Построим
теперь желаемую ЛАЧХ, среднечастотный
участок которой имеет наклон –20 дБ/дек.
Исходя из заданного перерегулирования
![]() ,
по номограммам [2] (рис. 6.15) определим
,
по номограммам [2] (рис. 6.15) определим
![]() и
и
![]() .
Частоту
среза обычно находят по соотношению
.
Частоту
среза обычно находят по соотношению
![]() ,
поэтому выберем
,
поэтому выберем
![]() .
В этом случае
.
В этом случае
![]() дек. Запас устойчивости по модулю,
ограничивающий среднечастотный участок
ЛАЧХ, также определим по номограмме,
дек. Запас устойчивости по модулю,
ограничивающий среднечастотный участок
ЛАЧХ, также определим по номограмме,
![]() .
В результате получим
.
В результате получим
![]() ,
которая приведена на рис. 6.14.
,
которая приведена на рис. 6.14.
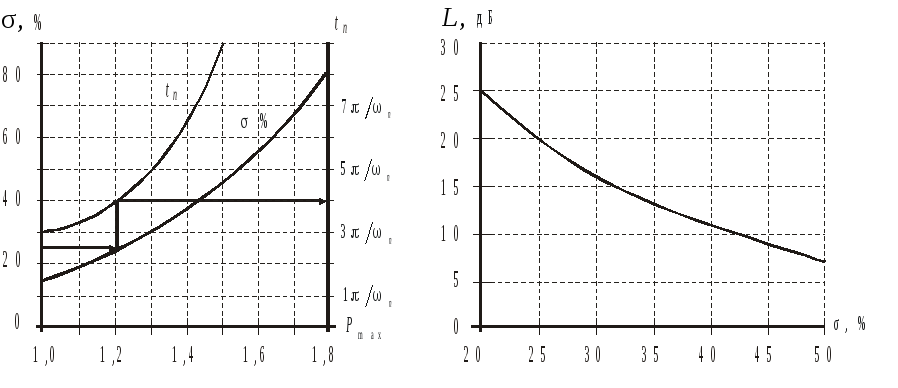
Рис. 6.15. Номограммы для определения параметров желаемой ЛАЧХ
Определим
теперь
![]() и запишем
и запишем
![]() ,
,
где
![]()
![]()
![]()
![]() .
Отсюда следует, что
.
Отсюда следует, что
![]()
![]()
![]()
![]() .
Окончательно запишем
.
Окончательно запишем
![]()
или
![]() .
.

Рис. 6.16. Пример схемной реализации регулятора
Схемная реализация полученной передаточной функции корректирующего звена, соответствующая второму каноническому представлению (см. п. 3.6.2), приведена на рис. 6.16.