

6.4.6. Определение передаточной функции регулятора
Асимптотическую ЛАЧХ регулятора определим графически в соответствии с основным соотношением частотного метода синтеза (6.34) в виде
![]()
По
найденной характеристике определим
частоты сопряжения, где происходит
излом
![]() ,
и соответствующие им значения постоянных
времени. Передаточная функция
,
и соответствующие им значения постоянных
времени. Передаточная функция
![]() определяется на основе процедуры,
обратной по отношению к правилу
построения ЛАЧХ объекта. Причем в
окончательную передаточную функцию
регулятора следует добавить коэффициент
усиления
определяется на основе процедуры,
обратной по отношению к правилу
построения ЛАЧХ объекта. Причем в
окончательную передаточную функцию
регулятора следует добавить коэффициент
усиления
![]() ,
рассчитанный по условиям статики, т.
е.
,
рассчитанный по условиям статики, т.
е.
![]() .
.
Реализовать полученную передаточную функцию можно на пассивных или активных элементах. В последнем случае удобно воспользоваться рекомендациями подразд. 3.6 по переходу от передаточной функции к структурным схемам, соответствующим каноническому представлению. Отметим, что в этом методе синтеза для реализации регулятора можно использовать любой из вариантов структурных схем.
Пример 6.6
Для системы, приведенной на рис. 6.8, с передаточной функцией объекта
![]()
и
построенной по заданным требованиям
к динамике и статике логарифмической
характеристикой
![]() (рис. 6.11) необходимо определить
передаточную функцию регулятора.
(рис. 6.11) необходимо определить
передаточную функцию регулятора.
Предварительно
графически найдем
![]() как разность между желаемой характеристикой
как разность между желаемой характеристикой
![]() системы и ЛАЧХ объекта
системы и ЛАЧХ объекта
![]() .
Определим частоты сопряжения
.
Определим частоты сопряжения
![]() ,
которые соответствуют точкам излома
характеристики корректирующего звена
,
которые соответствуют точкам излома
характеристики корректирующего звена
![]() .
Используя правило п. 6.4.3, запишем
передаточную функцию регулятора в виде
.
Используя правило п. 6.4.3, запишем
передаточную функцию регулятора в виде
![]() ,
,
где
![]() .
.
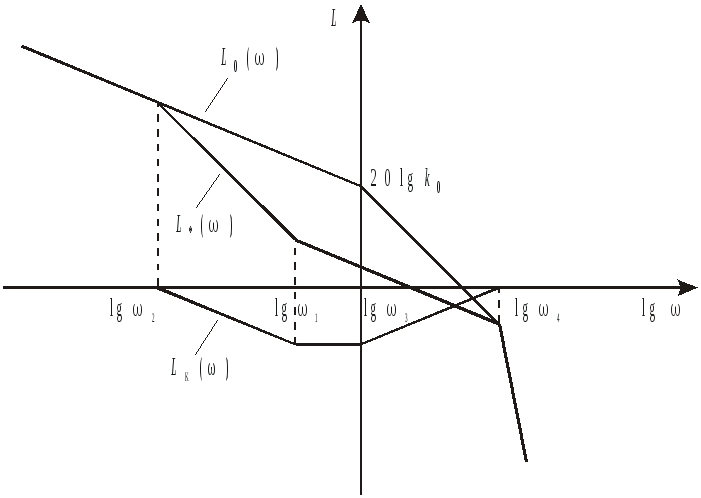
Рис. 6.11. Иллюстрация частотного метода синтеза
Схематично полученную передаточную функцию можно представить в виде цепочки последовательно соединенных интеграторов с прямыми и обратными связями, используя приемы, описанные в подразд. 3.6. Такое представление позволяет легко перейти к реализации корректирующего звена на активных элементах.
6.4.7. Влияние возмущения и помехи измерения на свойства замкнутой системы
Обсудим теперь влияние возмущения и помехозащищенность системы (рис. 6.12), рассчитанной частотным методом, для чего вернемся к ее исходной структуре (см. рис. 6.8).

Рис. 6.12. Расчетная структурная схема системы для частотного
метода синтеза
Рассмотрим
сначала случай, когда помеха измерения
пренебрежимо мала (![]() ).
Запишем выражение для выходной переменной
системы
).
Запишем выражение для выходной переменной
системы
![]() .
(6.39)
.
(6.39)
В соответствии с постановкой задачи синтеза необходимо, чтобы выходная переменная y повторяла входной сигнал v независимо от влияния возмущения M. Обсудим, как система справляется с этой задачей, для чего исследуем ее поведение на различных частотах.
В
области низких частот в соответствии
с (6.30) справедливо условие
![]() поэтому вторая составляющая выражения
(6.39) при замене p
на
поэтому вторая составляющая выражения
(6.39) при замене p
на
![]() обращается в нуль, а
обращается в нуль, а
![]() .
Таким образом, система на низких частотах
достаточно хорошо выполняет свою
функцию.
.
Таким образом, система на низких частотах
достаточно хорошо выполняет свою
функцию.
Вблизи
частоты среза (в области средних частот)
согласно (6.32) справедливо соотношение
![]() а составляющие выхода следующие:
а составляющие выхода следующие:
![]() и
и
![]() Очевидно, что в такой ситуации система
плохо воспроизводит вход и плохо
подавляет возмущение, т. е. работает
«частично».
Очевидно, что в такой ситуации система
плохо воспроизводит вход и плохо
подавляет возмущение, т. е. работает
«частично».
В
области высоких частот для частотных
характеристик справедливо соотношение
(6.31), поэтому вместо выражения (6.39)
получим
![]() и
и
![]() .
Как видим, в этом случае система не
справляется с поставленной задачей.
.
Как видим, в этом случае система не
справляется с поставленной задачей.
Следовательно,
чем шире полоса пропускания (чем больше
![]() ),
тем лучше в условиях действия возмущений
система выполняет свое назначение. При
построении желаемой логарифмической
характеристики разомкнутой системы
необходимо учитывать этот факт и
стремиться по возможности увеличивать
),
тем лучше в условиях действия возмущений
система выполняет свое назначение. При
построении желаемой логарифмической
характеристики разомкнутой системы
необходимо учитывать этот факт и
стремиться по возможности увеличивать
![]() .
.
Обсудим теперь влияние помехи h, полагая входное воздействие v и возмущение М равными нулю. Поскольку объект, как правило, имеет ограниченную полосу пропускания и в этом случае выступает в роли фильтра, то высокочастотная помеха не будет проходить на выход системы. В основном помеха оказывает влияние на управляющее воздействие, для которого операторное выражение имеет вид
![]() .
(6.40)
.
(6.40)
Рассмотрим соответствующую частотную характеристику и запишем приближенные выражения для управления (6.40) на различных частотах.
В
области низких частот, когда
![]() получим
получим
![]()
Как видим, влияние помехи будет тем меньше, чем больше коэффициент усиления объекта.
Для
области средних частот справедливо
условие
![]() при этом
при этом
![]()
т. е. влияние помехи повышается по сравнению с предыдущим случаем.
В области высоких частот при выполнении соотношения (6.31) составляющую управления, порожденную помехой, приближенно можно оценить следующим образом:
![]() .
.
Таким образом, в этом случае влияние помехи полностью определяется свойствами корректирующего звена.
Следовательно,
для уменьшения влияния помехи на низких
и средних частотах нужно применять
«качественный» датчик, а на высоких
частотах
![]() можно парировать путем использования
регулятора, обладающего интегрирующими
свойствами. Подобный эффект будет
наблюдаться, если степень полинома
числителя передаточной функции
можно парировать путем использования
регулятора, обладающего интегрирующими
свойствами. Подобный эффект будет
наблюдаться, если степень полинома
числителя передаточной функции
![]() меньше степени полинома ее знаменателя.
В случае, когда степени полиномов
меньше степени полинома ее знаменателя.
В случае, когда степени полиномов
![]() и
и
![]() равны, в регулятор рекомендуется
добавить апериодическое звено с малой
постоянной времени.
равны, в регулятор рекомендуется
добавить апериодическое звено с малой
постоянной времени.