

Список рекомендуемой литературы:
Савельев И.В. Курс общей физики. – М., т.1, 1962, с. 128-133.
Матвеев А.Н. Механика и теория относительности. - М., 1976, с. 323.
Стрелков С.П. Механика. - М., 1965, с. 214-238.
Хайкин С.Э. Физические основы механики. - М., 1971, с. 446-459.
Краткая теория вопроса:
В основе всей теории гироскопа лежит закон сохранения и изменения момента импульса (момента количества движения).
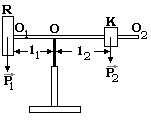
Рассмотрим гироскоп, состоящий из ротора R, который может вращаться вокруг горизонтальной оси O1O2 (рис. 1) и противовеса K . Ось гироскопа шарнирно закреплена в точке O вертикальной подставки. Если противовес К расположен таким образом, что точка O является центром тяжести, т.е. P1l1 = P2l2,
|
|
|
Рис. 1 |
Пусть диск
вращается с угловой скоростью
![]() .
В этом случае он обладает моментов
количества движения
.
В этом случае он обладает моментов
количества движения
![]() ,
где J - момент инерции
ротора относительно оси вращения.
Так как на основании II
закона динамики для вращательного
движения:
,
где J - момент инерции
ротора относительно оси вращения.
Так как на основании II
закона динамики для вращательного
движения:
![]() или:
или:
 , (1)
, (1)
при
![]() :
:
![]() ,
то есть
,
то есть
![]() .
Это значит, что в этом случае
.
Это значит, что в этом случае
![]() остается постоянным как по величине,
так и по направлению, а, следовательно,
ось O1O2,
вдоль которой направлен вектор
остается постоянным как по величине,
так и по направлению, а, следовательно,
ось O1O2,
вдоль которой направлен вектор
![]() ,
будет сохранять свое положение в
пространстве неизменным.
,
будет сохранять свое положение в
пространстве неизменным.
Если переместить теперь противовес К
вправо, то центр тяжести переместится
в точку O` (рис.2), в результате на систему
начнет действовать момент сил
![]() .
В этом случае
.
В этом случае
![]() .(2)
.(2)
-

Рис. 2
Величина
момента
![]() а, следовательно, и
а, следовательно, и
![]() зависит как от суммарной
зависит как от суммарной
![]() силы тяжести, действующей на систему,
так и от расстояния между точкой
закрепления O
и новым центром тяжести O`.
Это расстояние определяется радиус-вектором
силы тяжести, действующей на систему,
так и от расстояния между точкой
закрепления O
и новым центром тяжести O`.
Это расстояние определяется радиус-вектором
![]() ,
проведенным из точки O
в O`.
Согласно уравнению (2), направление
вектора
,
проведенным из точки O
в O`.
Согласно уравнению (2), направление
вектора
![]() и вектора
и вектора
![]() должны совпадать. Т.к. в этом случае
вектор
должны совпадать. Т.к. в этом случае
вектор![]() ,
а, следовательно, и оси вращения
гироскопа, и тогда вектор
,
а, следовательно, и оси вращения
гироскопа, и тогда вектор
![]() начнет, не меняя своей величины,
поворачиваться. При этом его конец
будет двигаться в направлении
начнет, не меняя своей величины,
поворачиваться. При этом его конец
будет двигаться в направлении
![]() .
.
В связи с тем, что вектор
![]() будет при этом все время оставаться
перпендикулярным оси ОО`, эта ось будет
все время поворачиваться, описывая
конус вокруг вертикальной оси СС1.
Скорость этого вращения называется
угловой скоростью прецессии
будет при этом все время оставаться
перпендикулярным оси ОО`, эта ось будет
все время поворачиваться, описывая
конус вокруг вертикальной оси СС1.
Скорость этого вращения называется
угловой скоростью прецессии
![]() ,
где
,
где
![]() - угол поворота оси гироскопа вокруг
СС1, за время
- угол поворота оси гироскопа вокруг
СС1, за время
![]() .
.
Величина момента внешних сил (см. рис.2)
![]() равна
равна
![]() или
или
![]() (3).
(3).
Он приложен к точке О, и перпендикулярен плоскости, преходящей через оси ОО` и СС1.
Найдём величину скорости прецессии
![]() .
Из формул (2) и (3) получим
.
Из формул (2) и (3) получим![]() ,
но dL (см. рис.2) равна
,
но dL (см. рис.2) равна
![]() ,
тогда
,
тогда
![]() ,
откуда
,
откуда
![]() или
или
![]() .
.
Из последнего уравнения видно, что
скорость прецессии зависит как от r
, так и от скорости вращения волчка .
Если = const,
то отношение
![]() должно оставаться неизменным при
всех значениях r и равным
J.
Отсюда, зная можно
найти момент инерции ротора гироскопа.
должно оставаться неизменным при
всех значениях r и равным
J.
Отсюда, зная можно
найти момент инерции ротора гироскопа.
Доказать самостоятельно, что r*(P1 + P2) = S*P2 , где S - величина смещения груза Р2 из равновесного положения, или S = l2.
В
этом случае
![]() .
.