

2) пронормируем l величиной lо , для чего умножим и разделим правую часть
уравнения на lо . Путем соответствующего группирования членов перейдем к относительным управляющим воздействиям:
j
éæ |
¶M |
c |
ö |
|
æ |
¶M |
д |
ö |
|
ù |
êç |
|
÷ |
|
- ç |
|
÷ |
|
ú |
||
|
|
|
|
|
||||||
¶w |
|
ç |
¶w |
÷ |
|
|||||
è |
ø |
0 |
è |
ø |
|
ú |
||||
ê |
|
|
|
|
|
0 |
||||
ë |
|
|
|
|
|
|
|
|
û |
|
Введем обозначения:
x(t) = Dw ; wо
æ |
Dwö |
|
|
|
|
|
|
|
|
|
æ ¶M |
|
ö |
|
|
l |
о |
|
|
|
|
|
|
||||||||
ç |
|
÷ |
|
|
|
|
|
|
|
|
|
|
ç |
|
|
|
д |
÷ |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
dç |
|
÷ |
|
|
|
Dw |
|
|
|
|
|
ç |
|
¶l |
|
÷ |
|
|
wо |
|
|
|
|
Dl |
|
||||||
è wо |
ø |
|
+ |
= |
|
|
|
è |
|
|
ø0 |
|
|
|
|
|
|
||||||||||||||
|
dt |
|
|
|
wо |
|
éæ |
¶M |
c |
ö |
|
|
|
|
æ |
|
¶M |
д |
ö ù lо |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
êç |
|
|
÷ |
|
- ç |
|
|
|
|
÷ |
|
ú |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
¶w |
|
|
|
|
ç |
|
|
¶w |
÷ |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
êè |
ø0 |
|
|
|
è |
|
|
ø |
0 |
ú |
|
(1.7) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
ë |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
û . |
|||
T = |
|
|
|
|
|
|
|
|
|
j |
|
|
|
|
|
|
|
|
|
; |
|
|
|
|
|
|
|
||||
éæ |
¶M |
c |
ö |
|
|
|
æ ¶M |
д |
|
ö ù |
|
|
|
|
|
|
|
||||||||||||||
|
|
êç |
|
|
÷ |
|
|
- ç |
|
|
|
÷ |
|
|
ú |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
¶w |
|
|
|
ç |
¶w |
÷ |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
è |
|
ø |
0 |
|
è |
ø |
|
|
ú |
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
ê |
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
ë |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
û |
|
|
|
|
|
|
|
|
|
|
||||
|
|
æ ¶M |
ö |
|
l |
о |
|
|
|
|
|
|
|||
|
|
ç |
|
|
д |
÷ |
|
|
|
|
|
|
|
|
|
|
|
|
¶l |
|
|
w |
|
|
|
|
|
|
|||
|
|
ç |
|
÷ |
|
|
|
|
|
Dl |
|
||||
k = |
|
è |
|
|
ø0 |
|
|
о |
|
|
|
|
; |
||
éæ |
¶M |
c |
ö |
æ |
¶M |
д |
ö |
|
ù |
lо |
|||||
êç |
|
÷ |
- ç |
|
|
|
÷ |
|
ú |
|
|
||||
|
|
|
|
|
|
|
|
||||||||
¶w |
ç |
|
¶w |
÷ |
|
|
|
||||||||
êè |
ø0 |
è |
|
ø |
0 |
ú |
|
|
|||||||
ë |
|
|
|
|
|
|
|
|
|
|
û |
|
|
||
Вычислим производную x'(t) :
z(t) = Dl . lо
|
|
|
|
æ |
Dw |
ö |
|
|
|
|
|
|
ç |
÷ |
|
|
|
¢ |
d[x(t)] |
|
dç |
|
÷ |
|
|
|
|
è wо |
ø |
|
|
||||
x (t) = |
|
|
= |
|
|
|
|
|
dt |
|
dt |
. |
(1.9) |
||||
|
|
|
||||||
Подставив (1.8) и (1.9) в (1.7), получим дифференциальное линеаризованное уравнение в относительных величинах, связывающее относительные угловую скорость
двигателя x(t) и изменение управляющего воздействия z(t) : |
|
′ |
(1.10) |
Tx (t) + x(t) = kz(t) . |
Коэффициент T называется постоянной времени двигателя (объекта регулирования) и имеет размерность времени (с). Он определяет быстродействие двигателя, т.е. как быстро устанавливается заданная угловая скорость при изменении управляющего воздействия.
Коэффициент k носит название передаточного коэффициента и является безразмерной величиной. Он характеризует зависимость между изменением выходной
величины x(t) и управляющим воздействием z(t) в установившемся режиме. Следует подчеркнуть, что дифференциальное уравнение (1.10) описывает
динамику линеаризованной системы управления двигателем в окрестности рабочей
точки ( wо , lо ). Если в исходной нелинейной системе (1.1) изменится рабочая точка, то
это вызовет изменение коэффициентов T и k .
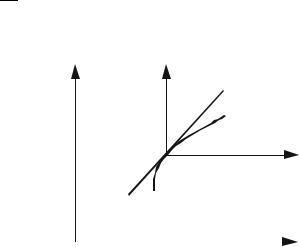
Рассмотрим геометрический смысл линеаризации (рис.1.16). Линеаризация нелинейной зависимости двух переменных означает:
∙замену исходной кривой AB отрезком ее касательной A'B' в точке O′ , соответствующей установившемуся режиму;
∙параллельный перенос начала координат в точку O′ .
1.6. Частотные характеристики линейных динамических систем
22
В дальнейшем будем рассматривать стационарные линейные динамические системы (ЛДС), т.е. системы, которые представляются следующим дифференциальным уравнением:
|
|
an x |
(n) |
(t) + an−1x |
(n−1) |
|
&& |
& |
|
|||||
|
|
|
|
|
|
(t) + ... + a2 x(t) |
+ a1x(t) + ao x(t) = |
|
||||||
|
|
= bm z |
(m) |
(t) + bm−1z |
(m−1) |
t |
& |
(1.11 |
||||||
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
(t) + ... + b2 z(t) + b1z(t) + bo z(t) , |
||||||||
где x(t) и z(t) - соответственно выходной и входной сигналы, причем |
|
|||||||||||||
выполняется условие физической реализуемости n ³ m . |
|
|||||||||||||
В операторной форме дифференциальное уравнение (1.11) имеет вид: |
|
|||||||||||||
A( p)x(t) = B( p)z(t) , |
|
|
|
|
|
|
|
|
|
|
||||
где A( p) , B( p) - дифференциальные операторы левой и правой частей |
|
|||||||||||||
уравнения; |
|
pn + ...a p + a |
|
B( p) = b pm + ...b p + b |
|
|||||||||
A( p) = a |
n |
о ; |
|
|||||||||||
|
1 |
|
|
|
|
|
|
n |
1 |
о ; |
|
|||
p = dpd - оператор дифференцирования.
Mc Mc
B 
B
O Δω
Δω
A A
A
0 |
|
|
ω |
||
Рис.1.16.Графическая интерпретация процесса
линеаризации динамической системы
Для математического описания ЛДС широко используются частотные характеристики, позволяющие судить о реакции системы на входные гармонические воздействия различных частот.
Пусть на вход ЛДС поступает гармоническое воздействие в виде бесконечной косинусоиды: z(t) = Z cos(ωt) . Определим x(t) - реакцию системы на этот сигнал.
Известно, что согласно формуле Эйлера |
e+ jωt = cosωt + j sin ωt , поэтому |
|||||||||
cosωt = |
e+ jωt + e− jωt |
|
|
|
|
|
|
|
|
|
2 |
и входное воздействие можно записать в следующем виде: |
|||||||||
|
||||||||||
|
|
z(t) = Z cosωt = |
Z |
e+ jωt + |
Z |
e− jωt = z (t) + z |
2 |
(t) |
||
|
|
|
|
|||||||
|
|
2 |
|
2 |
1 |
. |
||||
|
|
|
|
|
||||||
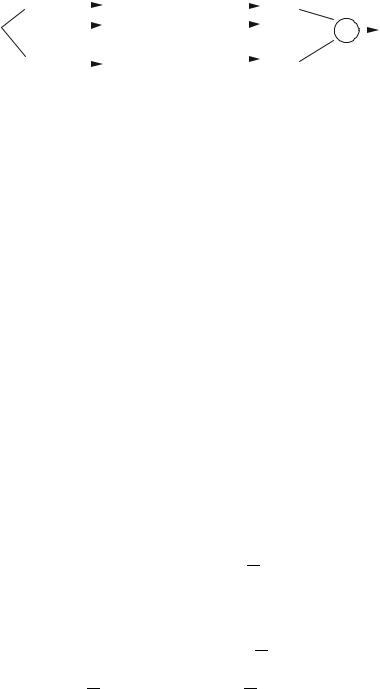
Для всех ЛДС справедлив принцип суперпозиции: реакция системы на
несколько одновременных входных воздействий равна сумме реакций на каждое воздействие (рис.1.17).
23
|
|
z1(t) |
|
|
|
|
|
x1(t) |
|
|
|
|
|
|
|
|
|
Линейная |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
z(t) |
|
z2(t) |
|
|
|
|
|
x2(t) |
|
|
|
|
|
|
x(t) |
|
|
|
|
динамическая |
|
|
|
|
|
|
|
||||||
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
... |
|
|
|
|
система |
... |
|
|
|
|
|
|
|
||
|
|
zn(t) |
|
|
|
|
|
xn(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
||||||||
Рис.1.17. К пояснению принципа суперпозиции
Отсюда следует практический вывод: если на вход ЛДС поступает сложный сигнал, который можно представить в виде совокупности нескольких простых сигналов
zi (t) , то результирующим сигналом на выходе системы будет сумма реакций этой системы на каждую составляющую xi (t) .
|
|
|
N |
|
Другими словами, если на вход ЛДС подается сигнал |
z(t) = å zi (t) |
, то на ее |
||
i=1 |
||||
|
N |
|
|
|
|
x(t) = å x (t) |
|
|
|
выходе будет сигнал |
i=1 i |
, где N - количество компонентов, на которые |
||
раскладывается входной сигнал z(t) . Для частного случая, когда входной сигнал имеет
вид z(t) = z1(t) + z2 (t) , выходной сигнал вычисляется по формуле: xi (t) = x1(t) + x2 (t) . Определим эффекты, создаваемые каждым из двух экспоненциальных воздействий, на которые разложен исходный входной сигнал.
Для ЛДС справедливо следующее правило: реакцию системы на входное
воздействие можно вычислить путем умножения этого сигнала на функцию параметров системы:
x1(t) = z1(t)W ,
где W - некоторая функция параметров системы. Например, для радиоэлектронной системы функция W зависит от номиналов резисторов, конденсаторов, индуктивностей, составляющих данную систему. При этом для стационарной системы W не является функцией времени (W ¹ W(t)).
Продифференцируем m раз входной сигнал
x (t) = |
Z |
e+ jwtW |
|
|
|
|
|
|
|
2 |
, в результате получим: |
||||||||
сигнал 1 |
|
||||||||
|
|
|
& |
(t) = |
Z |
( jω)e |
+ jwt |
; |
|
|
|
|
|
|
|||||
|
|
|
z1 |
2 |
|
||||
|
|
|
|
|
|
|
|
||
&z&1(t) = Z2 ( jω)2 e+ jwt ;
….
z (t) = Z e+ jwt |
|
|
1 |
2 |
и n раз выходной |
|
||
x&1(t) = Z2 ( jω)e+ jwtW ; &x&1(t) = Z2 ( jω)2 e+ jwtW;
….
z (m) |
(t) = |
Z |
( jω)m e+ jwt ; x(n) (t) = |
Z |
( jω)n e+ jwtW. |
|
|
||||
1 |
2 |
1 |
2 |
|
|
|
|
|
|||
После подстановки выражений для входного и выходного сигналов и их производных в дифференциальное уравнение (1.11) получим:
[a |
n |
( jω)n + a |
n-1 |
( jω)n-1 +... + a |
2 |
( jω)2 + a ( jω) + a |
0 |
] |
Z |
e+ jwt |
× W = |
|||||||||||||||||
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
2 |
|
|
|
|
|
|
|
|||||||
= |
[b |
( jω)m + b |
|
|
|
( jω)m-1 |
+ ...+ b ( jω)2 |
+ b ( jω) + b |
|
] |
Z |
e+ jwt . |
|
|||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||||
Откуда |
|
m |
|
|
m-1 |
|
|
|
|
|
|
2 |
|
1 |
|
0 |
2 |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W =W ( jω) = |
b |
|
|
( jω)m + b |
|
|
( jω)m-1 +...+ b ( jω)2 + b ( jω) + b |
, |
||||||||||||||||||||
m |
|
|
m-1 |
|
|
|
|
2 |
|
|
|
1 |
|
|
0 |
|||||||||||||
|
( jω)n + a |
|
|
|
|
|
|
+ a ( jω) + a |
|
|||||||||||||||||||
|
|
|
|
|
a |
n |
n-1 |
( jω)n-1 +...+ a |
2 |
( jω)2 |
0 |
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|||||||||
24

причем для реальных динамических систем m ≤ n .
Если в числителе и знаменателе раскрыть скобки, то получим:
W ( jω) = A(ω) + jB(ω) C(ω) + jD(ω) ,
где A(ω) = bо − b2 ω2 + b4 ω4 − b6 ω6 + ...; B(ω) = b1ω − b3ω3 + b5ω5...; C(ω) = aо − a2ω2 + a4ω4 − a6ω6 + ...; D(ω) = a1ω − a3ω3 + a5ω5...,
причем A(ω) и C(ω) - четные функции; B(ω) и D(ω) - нечетные.
W ( jω) носит название амплитудно-фазовой частотной характеристики или просто амплитудно-фазовой характеристики (АФХ), иногда ее называют комплексной
частотной характеристикой (КЧХ). Неправильно называть W ( jω) передаточной функцией, так как данный термин закреплен в ТАУ за другим важным понятием.
С целью упрощения записи формул введем обозначения: A = A(ω) ; B = В(ω) ; C = C(ω) ; D = D(ω). Тогда имеем:
W ( jω) = |
A + jB |
= |
(A + jB)(C − jD) |
= |
||
C + jD |
(C + jD)(C − jD) |
|||||
|
|
|
||||
= AC + BD |
+ j BC − AD = U (ω) + jV (ω) = H (ω)e jϕ(ω) , |
|||||
C2 + D2 |
C2 + D2 |
|
||||
где U (ω) = Re[W ( jω)] - вещественная частотная характеристика ЛДС; V (ω) = Im[W ( jω)] - мнимая частотная характеристика.
Функция U (ω) является четной в силу того, что
U (−ω) = Re[W (− jω)]= Re[W ( jω)]= U (ω) .
Здесь используются следующие соотношения:
∙произведение двух четных функций является четной функцией;
∙произведение двух нечетных функций является четной функцией;
∙произведение нечетной и четной функции дает нечетную функцию.
Функция V (ω) - нечетная, так как
V (−ω) = Im[W (− jω)]= − Im[W ( jω)]= −V (ω) .
В полярных координатах на комплексной плоскости АФХ имеет:
W ( jω) = H (ω)e jϕ(ω).
Величина H (ω) называется амплитудно-частотной характеристикой (АЧХ) и
|
|
|
|
определяется по формуле: H (ω) = |
|
U 2 (ω) + V 2 (ω) . Так как H (ω) = H (−ω) , то АЧХ |
|
является четной. |
|
|
|
Функция ϕ(ω) называется фазово-частотной характеристикой (ФЧХ) |
|||
|
ϕ(ω) = arctg V (ω) |
||
динамической системы. При этом |
|
U (ω) , если U (ω) > 0 (первый и четвертый |
|
квадранты). Формулы для вычисления ϕ(ω) для различных квадрантов представлены на рис.1.18.
25
|
jV(ω) |
|
|
|
|
||
|
II |
I |
|
ϕ(ω) = π + arctg[V(ω)/U(ω)] |
ϕ(ω) = arctg[V(ω)/U(ω)] |
||
|
|
|
|
0 |
U(ω) |
||
ϕ(ω) = −π + arctg[V(ω)/U(ω)] |
ϕ(ω) = arctg[V(ω)/U(ω)] |
||
|
III |
IV |
|
Рис.1.18. К определению ФЧХ в зависимости от номера
квадранта
Функция ϕ(ω) является нечетной, так как ϕ(ω) = −ϕ(−ω) .
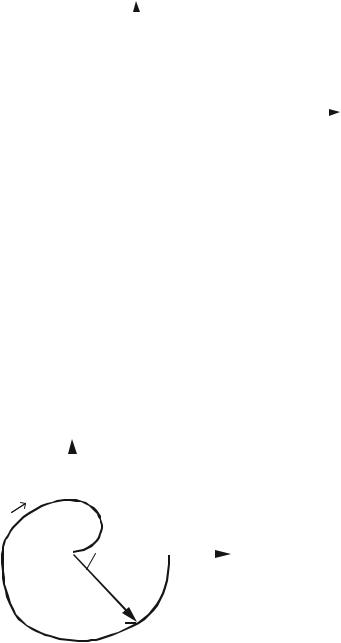
На комплексной плоскости АФХ определяет вектор, модуль которого равен
аргумент ϕ(ω) - угол, образованный этим вектором с действительной положительной полуосью.
Кривая, которую прочерчивает конец вектора W ( jω) при изменении ω от 0 до +∞ (иногда от –∞ до +∞), называется годографом, или АФХ системы (рис.1.19).
jV(ω)
|
ω |
∞ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ui |
ω = 0 |
||||
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
W(jω) |
Vi |
|
|
ϕ(ω) |
|
|
U(ω) |
|||||
|
|
|
|
|||||||||
|
|
|
|
|||||||||
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
W(jωi) |
|
|
|||||
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|||
Рис.1.19. Годограф динамической системы
Ранее было показано, что вещественная частотная характеристика является четной функцией, а мнимая частотная характеристика - нечетной функцией частоты. В
силу этого годограф, построенный для положительных значений ω , является зеркальным
отображением годографа, построенного для отрицательных значений ω .
Таким образом, ЛДС могут представлять пять частотных характеристик, между которыми существуют следующие очевидные зависимости:
1) АФХ или КЧХ
W ( jω) = H (ω)e jϕ(ω)
= U (ω) + jV (ω) ;
2) вещественная частотная характеристика
U (ω) = H (ω)cosϕ(ω) ; 3) мнимая частотная характеристика
26

|
4) |
АЧХ |
|
|
|
V (ω) = H (ω)sin ϕ(ω) ; |
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
H (ω) = |
|
W ( jω) |
|
= U 2 (ω) +V |
2 (ω) |
; |
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
5) |
ФЧХ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
ϕ(ω) = argW ( jω) = arg V (ω) |
при U (ω) > 0 . |
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U (ω) |
|
|
|
|
||||||||||
|
Частотные свойства ЛДС будут полностью определены, если известна функция |
|||||||||||||||||||||||||||
W ( jω) или соответствующие пары характеристик: U (ω) , V (ω) |
|
или H (ω) , |
ϕ(ω) . |
|||||||||||||||||||||||||
|
Наиболее часто используются АФХ, а также АЧХ и ФЧХ, так как эти |
|||||||||||||||||||||||||||
характеристики имеют ярковыраженный физический смысл. |
|
|
|
|
|
|
||||||||||||||||||||||
|
Еще раз подчеркнем, что введенные частотные характеристики относятся к |
|||||||||||||||||||||||||||
стационарной ЛДС и не зависят от времени. |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
Зная, что W = W ( jω) = H (ω)e jϕ(ω) , определим реакцию ЛДС на сигнал |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z (t) = |
Z |
e jωt |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
z(t) = Z cosωt . Ранее было показано, что z(t) = z1(t) + z2 (t) , причем 1 |
2 |
|
и |
|||||||||||||||||||||||||
z2 (t) = |
Z |
e |
− jωt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
. Вычислим соответствующие составляющие выходного сигнала x1(t) и |
|||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||
x2 (t) линейной динамической системы: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
x (t) = z (t)W = |
Z |
e jωt H (ω)e jϕ(ω) |
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
1 |
|
|
|
|
1 |
2 |
|
|
|
|
|
|
|
; |
|
|
|
|
|
||||||
|
|
|
|
|
Z |
|
|
|
|
|
|
|
|
Z |
|
|
|
|
|
|
|
|||||||
|
|
|
x2 (t) = z2 (t)W = |
|
e |
− jωt |
H (−ω)e |
jϕ(−ω) |
= |
e |
− jωt |
H (ω)e |
− jϕ(ω) |
|
||||||||||||||
|
|
|
2 |
|
|
|
|
2 |
|
|
|
|
|
, |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
здесь учитывается, что H (−ω) = H (ω) , ϕ(−ω) = −ϕ(ω) . |
|
|
|
|
|
|
|
||||||||||||||||||||
|
Применив принцип суперпозиции, получим общий (суммарный) выходной |
|||||||||||||||||||||||||||
сигнал линейной динамической системы: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
x(t) = x (t) + x |
2 |
(t) = ZH (ω) e jωt e jϕ(ω) + e− jωt e− jϕ(ω) |
= |
|
|
|
|||||||||||||||||||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
||||
= ZH (ω) e j[ωt +ϕ(ω)] + e− j[ωt +ϕ(ω)] = ZH (ω) cos[ωt + ϕ(t)]. 2
Можно сделать следующий вывод: если на вход ЛДС подать гармонический сигнал определенной частоты и определенной амплитуды, то на выходе также получим
гармонический сигнал той же частоты, но его амплитуда изменится в H (ω) раз и выходной сигнал сдвинется по фазе на угол ϕ(ω) .
Графики входного z(t) и выходного x(t) сигналов представлены на рис.1.20.
27