

Лекции по обыкновенным дифференциальным уравнениям Ржавинская Белякова Жаркова
.pdfПодставляем Y в систему (4.32)
|
|
|
|
(2 + i)a e(2+i)t |
= a e(2+i)t |
+ a |
2 |
e(2+i)t ; |
|||||
|
|
|
|
1 |
|
|
1 |
|
|
|
|
||
|
|
|
|
(2 + i)a |
2 |
e(2+i)t |
= -2a e(2+i)t + 3a |
e(2+i)t , |
|||||
|
|
|
|
|
|
|
1 |
|
|
|
2 |
|
|
|
что приведет к равенству a2 = (1+ i)a1 . |
|
|
|
|
|
|
|
|||||
|
Пусть |
α1 |
= 1, |
|
|
|
æ |
1 ö |
(2 |
+i)t |
|
- частное решение (4.32). Тогда |
|
|
|
|
|
ç |
÷ |
|
|||||||
|
тогда a2 = (1+ i)a1 , Y = ç |
÷e |
|
|
|
||||||||
|
|
|
|
|
|
|
è1+ iø |
|
|
|
|
|
|
~ |
= ReY |
~ |
= ImY |
тоже решения системы (4.32) (теорема 4.4). |
|||||||||
Y1 |
; Y2 |
||||||||||||
Имеем
æ |
1 ö |
2t |
|
|
|
|
æ |
|
cost + i sin t |
ç |
÷ |
(cost + i sin t) |
= e |
2t ç |
|
|
|||
Y = ç |
÷e |
|
ç |
|
|
||||
è1 |
+ iø |
|
|
|
|
|
ècost + i sin t + i(cost |
||
|
|
|
|
æ cost |
ö |
|
|
æ |
sin t ö |
|
= e |
2t ç |
÷ |
+ ie |
2t ç |
÷ |
|||
|
ç |
÷ |
ç |
÷ . |
|||||
|
|
|
|
ècost - sin t ø |
|
|
èsin t + cost ø |
||
|
|
1442443 |
|
1442443 |
|||||
ö
÷ = + isin t)ø÷
ReY |
ImY |
Таким образом, общее решение системы (4.32)
|
æ cost |
Yобщ = C1e |
2t ç |
ç |
|
|
ècost - sint |
ö |
|
2t |
÷ |
+ C2e |
|
÷ |
|
|
ø |
|
|
æ |
sint |
ö |
ç |
|
÷ . |
ç |
|
÷ |
ècost + sint ø
Случай 3. Среди характеристических корней есть кратные. Пусть характеристический корень k = k1 имеет кратность r. Частные решения, входящие в фундаментальную систему решений и соответствующие корню k1, ищем в виде
|
|
æC(0) |
ö |
|
|
|
|
æC(1) |
ö |
|
|
|
|
|
|
|
|
|
æC(r−1) |
ö |
|
|
|
|
|
||||||
|
|
ç |
1 |
|
÷ |
k1t |
|
|
|
ç |
1 |
|
÷ |
|
|
k1t |
|
|
|
|
|
|
ç |
1 |
÷ |
|
r−1 k1t |
|
|||
Y1 |
= |
ç |
... |
÷ |
; Y2 = |
ç |
... |
|
÷ |
|
|
, ..., |
Yk |
= |
ç |
... |
÷ |
|
. |
||||||||||||
ç |
e |
|
ç |
|
te |
|
ç |
t |
|
e |
|
||||||||||||||||||||
|
|
|
|
÷ |
|
|
|
|
|
|
÷ |
|
|
|
|
|
|
1 |
|
|
|
÷ |
|
|
|
|
|
||||
|
|
çC(0) |
÷ |
|
|
|
|
çC(1) |
÷ |
|
|
|
|
|
|
|
|
|
çC(r−1) |
÷ |
|
|
|
|
|
||||||
|
|
è |
n |
|
ø |
|
|
|
|
è |
n |
|
ø |
|
|
|
|
|
|
|
|
|
è |
n |
ø |
|
|
|
|
|
|
Тогда общее решение системы уравнений (4.25) следующее: |
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
æC(0) |
ö |
|
|
|
|
æC(1) |
ö |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
ç |
1 |
|
÷ |
|
k1t |
|
ç |
1 |
÷ |
|
k1t |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
Yобщ. = |
ç |
... |
|
÷ |
|
+ |
ç |
|
÷ |
|
+...+ |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
ç |
|
÷e |
|
|
ç ... |
÷te |
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
çC(0) |
÷ |
|
|
|
|
çC(1) |
÷ |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
è |
n |
|
ø |
|
|
|
|
è |
n |
ø |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
æC(r −1) |
ö |
|
|
|
|
æC |
(r) |
ö |
|
|
|
|
|
æC(n−r) |
ö |
|
|
|
|
|
|||||||
|
|
|
|
ç |
1 |
|
|
÷ |
r−1 |
|
k1t |
|
ç |
1 |
÷ |
k2t |
|
|
|
|
ç |
1 |
÷ |
|
|
kn−r t |
|
|
|||
|
|
|
+ |
ç |
... |
|
÷ |
|
+ |
ç |
... |
÷ |
+ |
...+ |
ç |
... |
÷ |
e |
. |
|
|||||||||||
|
|
|
ç |
|
t |
e |
|
ç |
e |
ç |
÷ |
|
|
||||||||||||||||||
|
|
|
|
|
|
|
÷ |
|
|
|
|
|
(r) |
÷ |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
çC(r −1) |
÷ |
|
|
|
|
çC |
÷ |
|
|
|
|
|
çC(n−r) |
÷ |
|
|
|
|
|
||||||||
|
|
|
|
è |
n |
|
|
ø |
|
|
|
|
è |
|
n |
ø |
|
|
|
|
|
è |
n |
ø |
|
|
|
|
|
||
Последние n – r слагаемых соответствуют остальным характеристическим корням k2, …, kn – r.
93
PDF created with pdfFactory Pro trial version www.pdffactory.com
Пример 4.6. Проинтегрировать систему дифференциальных уравнений
ìx& = 2x - y, íîy& = x.
Решение. Составляем характеристическое уравнение для (4.33)
|
2 - k |
-1 |
|
= 0 |
|
|
|||
|
1 |
- k |
|
|
или k2 – 2k + 1 = 0, его корни k1,2 = 1. Решение системы (4.33) ищем в виде
x(t) = C1et + C2tet ;
y(t) = C3et + C4tet .
Подставляем (4.34) в систему (4.33)
ì |
|
t |
+ C |
e |
t |
+ C |
te |
t |
= 2C e |
t |
+ 2C |
te |
t |
- C e |
t |
- C |
t |
, |
|
ïC e |
|
|
|
|
|
|
te |
||||||||||||
í |
1 |
|
2 |
|
|
2 |
|
|
1 |
|
|
2 |
|
|
3 |
|
4 |
|
|
ïC et + C |
et + C |
tet = C et |
+ C |
tet . |
|
|
|
|
|
|
|||||||||
î |
3 |
|
4 |
|
|
4 |
|
|
1 |
|
2 |
|
|
|
|
|
|
|
|
(4.33)
(4.34)
Делим обе части на et и приравниваем коэффициенты при одинаковых степенях t
C3 = C1 - C2; C4 = C2.
Итак, решением системы (4.33) является пара функций
x(t) = C1et + C2tet; y(t) = (C1 – C2)et + C2tet
или вектор-функция
Y(t) = C |
æet ö |
+ C |
æ |
|
tet |
ö |
||
ç |
÷ |
ç |
|
t |
|
÷ . |
||
1ç |
t ÷ |
|
2 ç |
- e |
+ te |
t ÷ |
||
|
èe |
ø |
|
è |
|
ø |
||
Описанный метод нахождения решения системы линейных однородных дифференциальных уравнений (4.25) носит название метода собственных векторов.
4.5. Метод вариации произвольных постоянных для систем дифференциальных уравнений
Пусть дана система линейных неоднородных дифференциальных уравнений
dyi (t) |
n |
|
|
= åaij (t)y j + fi (t), i =1,...,n |
(4.35) |
||
dt |
|||
j=1 |
|
||
|
|
94
PDF created with pdfFactory Pro trial version www.pdffactory.com
или в краткой записи
dY |
= A(t)Y + F , |
(4.36) |
dt |
|
|
где
æ y (t) ö |
|
||
ç |
1 |
÷ |
, |
Y (t) = ç |
L |
÷ |
|
ç |
|
÷ |
|
è yn (t)ø |
|
||
dY dt
çdy1(t)
çdt
=ç L
çdyn (t)
çè dtæ
ö |
æ |
f (t) ö |
|
|
÷ |
|
|||
÷÷ , |
ç |
1 |
÷ |
; A = ||ai j (t)||, i, j =1,K,n . |
F = ç |
L |
÷ |
||
÷ |
ç |
|
÷ |
|
÷ |
è |
fn (t)ø |
|
|
ø |
|
|
|
|
Система соответствующих однородных уравнений
dY |
= A(t)Y . |
(4.37) |
dt |
|
|
Пусть Y1(t), …, Yn(t) - фундаментальная система решений системы (4.37). Тогда (теорема
4.5)
Yобщ. одн = C1Y1(t) + … + CnYn(t),
где C1, …, Cn - произвольные действительные числа.
Метод вариации для систем заключается в том, что решение системы (4.35) ищется в виде
Yобщ. неодн = C1(t) Y1(t) + … + Cn(t) Yn(t),
где C1(t), …, Cn(t) - некоторые неизвестные функции. Имеем
|
æ y(1) |
(t)ö |
|
æ y(n) (t)ö |
||||
|
ç |
1 |
|
÷ |
|
ç |
1 |
÷ |
Y (t) = ç |
L |
÷ |
,…, Y (t) = ç |
L |
÷ ; |
|||
1 |
ç |
|
|
÷ |
n |
ç |
|
÷ |
|
ç y(1) |
(t)÷ |
|
ç y(n) (t)÷ |
||||
|
è |
n |
|
ø |
|
è |
n |
ø |
|
æ y(1) |
(t)ö |
|
|
|
æ y(n) (t)ö |
|
||||
|
ç |
1 |
÷ |
|
|
|
ç |
1 |
|
÷ |
|
Y(t) = C (t)ç |
L ÷ |
+K+ C (t)ç |
L |
÷ |
= |
||||||
1 |
ç |
|
÷ |
|
|
n |
ç |
|
|
÷ |
|
|
ç y(1) |
(t)÷ |
|
|
|
ç y(n) (t)÷ |
|
||||
|
è |
n |
ø |
|
|
|
è |
n |
|
ø |
|
æC (t)y(1) |
(t) +LC |
n |
(t) y(n) |
(t)ö |
|
|
|
||||
ç |
1 |
1 |
|
|
|
1 |
÷ |
; |
|
|
|
=ç |
|
|
|
L |
|
|
|
÷ |
|
|
|
ç |
|
|
(t) +LC |
|
(t) y(n) |
÷ |
|
|
|
||
çC (t)y(1) |
n |
(t)÷ |
|
|
|
||||||
è |
1 |
n |
|
|
|
n |
ø |
|
|
|
|
|
æ |
|
(t)y1(1) |
(t) + C1(t)(y1(1) |
¢ |
+K+ Cn¢(t)y1(n) (t) + Cn (t)(y1(n) |
||
dY |
çC1¢ |
(t)) |
||||||
ç |
|
|
|
|
L |
|
|
|
dt |
=ç |
¢ |
(1) |
(1) |
¢ |
(n) |
(n) |
|
ç |
¢ |
|||||||
|
çC1 |
(t)yn |
(t) + C1(t)(yn |
(t)) |
+K+ Cn |
(t)yn |
(t) + Cn (t)(yn |
|
|
è |
|
|
|
|
|
|
|
(4.38)
(t) ÷
)¢ ö
÷ .
(t))¢ ÷÷÷
ø
95
PDF created with pdfFactory Pro trial version www.pdffactory.com
Подставим (4.38) в (4.35) и получим
æçC1¢(t)
ç
ç ¢
çèC1 (t)
|
(1) |
(t) +...+ Cn |
|
(n) |
¢ |
ö |
|
|
y1 |
(t)(y1 |
(t)) |
÷ |
|
||||
|
|
... |
|
|
|
|
÷ |
= |
y |
(1) |
(t) +...+ C |
|
(t)(y |
(n) |
¢ |
÷ |
|
n |
n |
n |
(t)) |
÷ |
|
|||
|
|
|
|
ø |
(4.39) |
|||
|
|
|
|
|
|
|
|
|
|
æC (t) y(1) |
(t) + ... + C |
n |
(t)y(n) (t)ö |
|
|||
|
ç |
1 |
1 |
|
1 |
÷ |
|
|
= A |
ç |
|
|
... |
|
|
÷ |
+ F |
ç |
|
|
|
|
÷ |
|||
|
çC (t) y(1) |
(t) + ... + C |
n |
(t)y(n) (t)÷ |
|
|||
|
è |
1 |
n |
|
n |
ø |
|
|
Вектор-функции Y1(t), …, Yn(t) - решения системы (4.37), поэтому
|
æ |
(y1(1) |
|
′ |
ö |
|
æ y1(1) |
(t)ö |
|
æ |
(y(n) |
|
′ |
ö |
|
|
æ y1(n) |
(t)ö |
||
|
ç |
(t)) |
÷ |
|
|
ç |
(t)) |
÷ |
|
|
||||||||||
C (t)ç ... |
|
÷ |
|
ç |
|
÷ |
|
(t)ç |
1 |
|
|
÷ |
= = |
|
ç |
|
÷ |
|||
|
= AC (t)ç |
... ÷ ,…, C |
n |
... |
|
AC (t)ç |
... ÷ . |
|||||||||||||
1 |
ç |
(1) |
|
¢ |
÷ |
1 |
ç |
(1) |
÷ |
ç |
|
|
¢ |
÷ |
|
n |
ç |
(n) |
÷ |
|
|
ç |
|
÷ |
|
|
ç |
(n) |
|
÷ |
|
|
|||||||||
|
(t)) |
|
ç |
÷ |
|
(t)) |
|
|
ç |
÷ |
||||||||||
|
ç |
(yn |
÷ |
|
è yn |
(t)ø |
|
ç |
(yn |
÷ |
|
|
è yn |
(t)ø |
||||||
|
è |
|
|
|
ø |
|
|
|
|
|
è |
|
|
|
ø |
|
|
|
|
|
Равенство (4.39) примет вид
æC ¢ |
(t) y(1) |
(t) |
|
ç |
1 |
1 |
|
ç |
|
... |
|
ç |
|
(t) y(1) |
(t) |
çC ¢ |
|||
è |
1 |
n |
|
ö |
æC |
¢ |
(t) y |
(n) |
÷ |
ç |
n |
1 |
|
÷ |
+ ...+ ç |
|
... |
|
÷ |
ç |
¢ |
(t) y |
(n) |
÷ |
çC |
n |
n |
|
ø |
è |
|
||
(t)ö÷
÷÷ = F
(t)÷
ø
или
ìïC1¢(t)y1(1) (t)
í
ïïîC1¢(t)yn(1) (t)
+ ... + Cn¢(t)y1(n) (t) = f1(t)
... . (4.40)
+ ... + Cn¢(t)yn(n) (t) = f2 (t).
Система (4.40) - система линейных алгебраических уравнений относительно неизвест-
ных функций C1′(t),...,Cn′(t) с определителем
|
y(1) (t) |
y(2) (t) |
L y(n) (t) |
|
|
D = |
1 |
1 |
|
1 |
¹ 0 . |
L |
L |
L |
L |
||
|
yn(1) (t) |
yn(2) (t) |
L |
yn(n) (t) |
|
(Допустим, = 0. Обозначим через A матрицу, для которой = |A|. Если = 0, то rang(A) < n Þ столбцы A линейно зависимы. Это противоречит тому, что Y1(t), …, Yn(t) - фундаментальная система решений системы (4.37), следовательно, ≠ 0.)
Итак, ≠ 0, и система (4.40) имеет единственное решение
C1′(t),...,Cn′(t) .
96
PDF created with pdfFactory Pro trial version www.pdffactory.com
Это решение интегрируем, находим функции C1(t), …, Cn(t) и записываем решение системы дифференциальных неоднородных уравнений (4.35) в виде (4.38).
Пример 4.7. Проинтегрировать методом вариации постоянных систему
ì |
|
1 |
|
|
ïx& |
= y + |
|
|
|
sin t . |
||||
í |
= -x |
|||
ïy& |
|
|
||
î |
|
|
|
|
Общее решение соответствующей однородной системы уравнений
ìx& = y íîy& = -x
имеет вид
x(t) = C1 cos t + C2 sin t, y(t) = –C1 sin t + C2 cos t
(см. пример 4.3).
Варьируем постоянные. Сразу запишем систему уравнений (4.40) для данного случая
|
|
|
|
ì |
|
¢ |
|
|
|
|
|
¢ |
|
|
|
1 |
|
|
|
|
|
|
|
ïC |
|
(t)cost |
+ C |
|
(t)sin t = |
|
|
|
|
||||||
|
|
|
|
|
|
sin t , |
|
|
|||||||||||
|
|
|
|
í |
1 |
|
|
|
|
|
2 |
|
|
|
|
|
|||
|
|
|
|
ï- C ¢ |
(t)sin t + C |
|
¢(t)sin t = 0 |
|
|
||||||||||
|
|
|
|
î |
|
|
1 |
|
|
|
|
|
2 |
|
|
|
|
|
|
откуда находим C |
′ |
(t) = 1 и C |
2 |
(t) = t + C |
3 |
; C ¢ |
(t) = |
cost |
и C (t) = ln | sin t | + C |
4 |
, и окончательно |
||||||||
|
|||||||||||||||||||
|
2 |
|
|
|
|
|
1 |
|
|
|
sin t |
1 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
получаем
x(t) = (ln | sin t | + C4 ) cost + (t + C3 )sin t; y(t) = (ln | sin t | + C4 )(-sin t) + (t + C3) cost,
где C3 и C4 - произвольные действительные числа. В векторной форме
Y |
= (ln | sin t | + C |
|
æ |
cost ö |
|
æ sint ö |
|
4 |
)ç |
÷ |
+ (t + C )ç |
÷ . |
|||
общ |
|
ç |
÷ |
3 |
ç |
÷ |
|
|
|
|
è |
- sin t ø |
|
ècost ø |
|
4.6. Устойчивость по Ляпунову. Классификация точек покоя
Пусть некоторый процесс описывается системой дифференциальных уравнений
dyi |
= f |
(t, y (t),K, y |
n |
(t)), i =1,2,K,n |
(4.41) |
|
|||||
dt |
i |
1 |
|
|
|
|
|
|
|
|
с начальными условиями y1(t0) = y10, …, yn(t0) = yn0.
97
PDF created with pdfFactory Pro trial version www.pdffactory.com
Начальные условия обычно определяются из опыта и, следовательно, неизбежно содержат некоторые погрешности.
Если бы малые изменения начальных условий сильно влияли на решение, то решение, найденное по начальным условиям, не представляло бы никакого интереса, так как даже приближенно не описывало бы изучаемый процесс.
Для прикладных задач важным является вопрос: при каких условиях достаточно малые изменения начальных значений вызывают сколь угодно малые изменения решения?
Если рассматриваемые значения t Î[t0,+¥) , то этим вопросом занимается теория устой-
чивости.
|
æ j (t) ö |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Решение |
ç 1 |
÷ |
системы |
(4.41) называется |
устойчивым по Ляпунову, если |
||||||||||||||||||||||
Φ(t) = ç ... |
÷ |
||||||||||||||||||||||||||
|
ç |
÷ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
èjn (t)ø |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
æY (t) ö |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
ε > 0 δ = δ(ε) такое, что "Y (t) = |
ç |
1 |
÷ |
- решение (4.41) "t > t0 |
справедливо |
||||||||||||||||||||||
ç |
... |
÷ |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
çY (t)÷ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
è |
n |
ø |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
æ |
|
|
|
y (t |
|
) - j (t |
|
) |
|
|
|
< d |
|
y (t) - j (t) |
|
|
|
< e ö |
||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
ç |
|
|
|
1 |
0 |
|
1 |
|
0 |
|
|
|
|
|
|
|
|
1 |
1 |
|
|
|
|
÷ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
ç |
|
|
|
|
|
|
... |
|
|
Þ |
|
|
|
|
... |
|
|
|
|
÷ . |
||||
|
|
|
ç |
|
yn (t0 ) - jn (t0 ) |
|
|
|
|
|
yn (t) - jn (t) |
|
|
÷ |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
è |
|
|
< d |
|
|
|
|
< eø |
||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||||
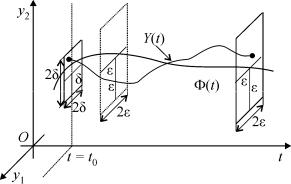
Геометрически в случае n = 2 устойчивость по Ляпунову означает, что все решения, мало отличающиеся в начальный момент времени t = t0 от Φ(t), не выйдут за пределы “трубы” около Φ(t) с квадратным сечением в любой следующий момент времени t > t0
(рис.4.3).
|
|
|
|
|
|
|
|
|
Рис.4.3. |
|
|
|
Если |
решение |
Φ(t) |
системы |
(4.41) |
устойчиво |
по |
Ляпунову |
|||||
и lim |
|
y (t) - j |
(t) |
|
= 0, i =1,2,K, n , |
то решение Φ(t) называется асимптотически устой- |
||||||
|
|
|||||||||||
t→+∞ |
|
i |
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
чивым.
98
PDF created with pdfFactory Pro trial version www.pdffactory.com

Пример 4.8. Исходя из определения, выяснить, устойчиво ли решение системы
ìdx = 4y,
ï dt
íï dy = -x
î dt
с начальными условиями x(0) = 0, y(0) = 0 .
Решение. Записываем соответствующее характеристическое уравнение
-k 4 = 0
-1 - k
или
k2 + 4 = 0 Þ k1, 2 = ±2i.
Решение системы ищем в виде
x(t) = α1 cos 2t + α2 sin 2t, y(t) = β1 cos 2t + β2 sin 2t.
Подставляя функции x(t) и y(t) в одно из уравнений системы, например, в первое, получаем:
–2α1 sin 2t + 2α2 cos 2t = 4β1 cos 2t + 4β2 sin 2t.
Отсюда
x(t) = a1 cos2t + a2 sin2t ; y(t) = a22 cos2t - a21 sin2t .
В векторной форме
|
æ |
|
cos2t ö |
|
æ sin |
2t ö |
|||
y(t) = a |
ç |
|
sin2t |
÷ |
+ a |
ç cos2t |
÷. |
||
1ç |
- |
|
÷ |
|
2ç |
|
|
÷ |
|
|
è |
|
2 |
ø |
|
è |
2 |
|
ø |
Подставляем начальные условия
x(0) = a1 = 0 ; y(0) = a22 = 0 .
æ0ö
Таким образом, на устойчивость предлагается исследовать решение Φ(t) = ç ÷ .
çè0÷ø
Составляем разность Y(t) − Φ(t). При произвольном t она имеет вид
|
æ |
a cos 2t + a |
2 |
sin 2t |
ö |
|
||||
Y (t) - Φ(t) = |
ç |
1 |
|
|
|
|
÷ |
, |
||
ç |
- |
a1 |
sin 2t + |
a2 |
cos 2t ÷ |
|||||
|
|
|
|
|||||||
|
è |
2 |
|
|
2 |
|
|
ø |
|
|
99
PDF created with pdfFactory Pro trial version www.pdffactory.com
|
|
|
|
|
|
|
|
|
|
æ a |
ö |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
при t = 0 обращается в вектор Y (t) - |
|
ç |
1 |
÷ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Φ(t) = ç a2 ÷ . |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
è |
2 ø |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a2 |
|
|||||||
Необходимо выяснить, каким нужно взять δ, чтобы из неравенств | a |<d; |
<d при |
||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2 |
|
|||||||
произвольном t следовала справедливость неравенств |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
a cos2t + a |
2 |
sin 2t |
|
< e ; |
|
- a1 sin 2t + |
a2 |
|
cos2t |
|
< e . |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
2 |
2 |
|
|
|
|
|
|
||||||||
Полагаем d = |
e |
. Тогда имеем при любом t > 0 |
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
a1 cos2t + a2 sin 2t |
|
£ | a1 | + | a2 |<e ; |
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
- a1 sin 2t + |
a2 |
|
cos2t |
|
£ | a1 |
| + | |
a2 |
|<e |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
2 |
|
2 |
|
|
|
|
2 |
2 |
|
|
|
|
|
|
||||||||||||
æ0ö
и решение Φ(t) = ç ÷ устойчиво по Ляпунову.
çè0÷ø
Следует отметить, что оно не является асимптотически устойчивым, так как, например,
lim |
|
a cos2t + a |
|
sin 2t |
|
не существует. |
|
|
|
||||
t→∞ |
|
1 |
2 |
|
|
|
|
|
|
|
æç j1(t) ö÷
Исследование на устойчивость решения системы (4.41) Φ(t) = ç ... ÷ можно свести к
çèjn (t)÷ø
исследованию тривиального решения - “точки покоя”.
В самом деле, пусть xi = yi – φi(t). Тогда
dxi |
= - |
dji (t) |
+ f |
(t, y - j (t),K, y |
i |
- j (t)) . |
(4.42) |
|
|
||||||
dt |
|
dt |
i |
1 1 |
i |
|
|
|
|
|
|
|
|
Исследовать на устойчивость решение yi = φi(t), i = 1, 2, …, n, системы (4.41) означает исследовать решение xi ≡ 0, i = 1, 2, …, n, системы (4.42).
Перефразируем применительно к (4.42) определение устойчивости решения по Ляпунову.
Точка покоя xi = 0, i = 1, 2, …, n, системы (4.42) называется устойчивой по Ляпунову, если
ε > 0 δ = δ(ε) такое, что "xi (t), "t >t0
(| xi (t0 ) |< d Þ | xi (t) |< e, i =1,2,..., n ).
Иными словами:
100
PDF created with pdfFactory Pro trial version www.pdffactory.com
|
|
|
|
æ x (t) |
ö |
|
$d1 |
= d1 |
ç 1 |
÷ |
|
"e > 0 |
(e) , что "x(t) = ç ... |
÷, "t >t0 |
|||
|
|
|
|
ç |
÷ |
|
|
|
|
è xn (t) |
ø |
|
æ |
n |
|
n |
ö |
|
çç |
åxi2 (t0 ) < d12 Þ åxi2 (t) < e2 |
÷÷ . |
||
|
è i=1 |
|
i=1 |
ø |
|
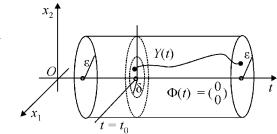
Для n = 2 (рис.4.4).
Рис.4.4.
Рассмотрим различные возможности расположения траекторий в окрестности точки
покоя Y0 = |
æ |
0ö |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ç |
÷ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ç |
÷ системы двух линейных однородных дифференциальных уравнений с по- |
|||||||||||||||
|
è |
0ø |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
стоянными коэффициентами |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
ì dx |
= a |
x + a |
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
ï |
|
11 |
12 |
. |
|
|
(4.43) |
|
|
|
|
|
|
|
|
|
í dt |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
ï |
dy |
= a21x + a22 y |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
î dt |
|
|
|
|
|
|
|
|
|
|
a |
a |
|
|
|
|
|
|
æ a |
ö |
kt |
|
||
|
|
|
|
|
|
|
|
|
|
|||||||
Будем считать |
11 |
12 |
|
¹ 0 |
. Решение ищем в виде |
ç 1 |
÷ |
. Характеристическое |
||||||||
a21 |
a22 |
|
Y (t) = ç |
÷e |
|
|||||||||||
|
|
|
|
|
|
|
|
|
èa2 |
ø |
|
|
||||
уравнение: |
|
a11 - k |
a12 |
|
|
= 0 . |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
a21 |
a22 - k |
|
|
|
|
|
|
|
|
|
|
|
|
|
Случай 1. Характеристические корни действительны и различны. Пусть это числа k1 и k2. Тогда общее решение системы уравнений (4.33) имеет вид
æ a |
ö |
k1t |
ç 1 |
÷ |
|
Yобщ = С1ç |
÷e |
|
èa2 |
ø |
|
æb |
ö |
k2t |
|
|
ç 1 |
÷ |
. |
(4.44) |
|
+ С2çb |
÷e |
|
||
è 2 |
ø |
|
|
|
Коэффициенты β1 и β2 линейно выражаются через α1 и α2.
Дальнейшее описание траекторий на фазовой плоскости проводим отдельно для нескольких случаев в зависимости от знаков k1 и k2.
а) Случай k1 < 0, k2 < 0. Пусть для определенности | k1| < | k2|.
101
PDF created with pdfFactory Pro trial version www.pdffactory.com
Тогда при t > 0
| x(t) | = | C1a1ek1t + C2b1ek2t | =
= ek1t | C1a1 + C2b1e(k2 −k1 )t | £ ek1t (| C1a1 | + | C2b1 |) .
Обозначим y(t) = ek1t (| C1a1 | + | C2b1 |) . Функция ψ(t) при t → +∞ бесконечно малая (как
произведение ограниченной функции на бесконечно малую ek1t ), тогда и x(t) тоже бесконечно малая при t → +∞ (теорема сравнения).
Аналогично y(t) при t → +∞ бесконечно малая функция.
Итак, lim |
x(t) = lim y(t) = 0 . |
t →+∞ |
t →+∞ |
Траектории системы двух линейных однородных дифференциальных уравнений с постоянными коэффициентами (4.43) на фазовой плоскости ведут себя следующим образом.
Все точки, находящиеся в начальный момент времени t = t0 в произвольной δ- окрестности начала координат, при достаточно большом t (t > T) переходят в точки, лежащие в сколь угодно малой ε-окрестности начала координат, а при t → +∞ стремятся к началу координат.
Точка покоя устойчива по Ляпунову и асимптотически устойчива. Точка покоя рассмотренного типа называется устойчивым узлом.
Пример 4.9. Исследовать точку покоя системы дифференциальных уравнений и дать чертеж расположения траекторий на плоскости xOy.
|
|
|
|
ìdx |
= -3x + 2y, |
||||
|
|
|
|
ï dt |
|||||
|
|
|
|
í dy |
|
|
|
||
|
|
|
|
ï |
|
= x - 4y. |
|||
|
|
|
|
î dt |
|||||
Решение. Записываем характеристическое уравнение |
|||||||||
|
|
- 3 - k |
2 |
|
|
= 0 или k2 + 7k + 10 = 0. |
|||
|
|
|
|
||||||
|
|
1 |
- 4 - k |
||||||
Его характеристические корни: k1 = –2, k2 = –5, точка покоя - устойчивый узел. |
|||||||||
|
|
|
|
dy |
|
x - 4y |
|||
Переходим от системы к уравнению |
dx = |
|
|
и, чтобы найти те решения, которые |
|||||
|
- 3x + 2y |
||||||||
изображаются прямыми, проходящими через точку O(0,0), подставляем в уравнение |
|||||||||
y = αx. Получаем |
|
|
|
|
|
|
|
||
|
|
x - 4a |
2 |
|
|
2 |
|||
a = |
|
; 2α |
|
– 3α = 1 – 4α; 2α + α – 1 = 0. |
|||||
- 3x + 2a |
|
||||||||
102
PDF created with pdfFactory Pro trial version www.pdffactory.com