6. Определение параметров функциональных зависимостей по их графикам
По линейным графикам часто определяется угловой коэффициент изображаемой зависимости. На рис. 5 изображена такая зависимость координаты l от времени t и показано, как определяется её угловой коэффициент l/t, имеющий размерность скорости.
Также по графикам можно находить производную y' нелинейной функции y(х). Этот способ определения производной называется методом графического дифференцирования. Метод графического дифференцирования основан на том, что производная равна отношению бесконечно малого приращения функции (dy) к бесконечно малому приращению аргумента (dх):
|
|
(15) |
Численное значение производной равно угловому коэффициенту касательной к графику зависимости y(x). Касательная проводится к той точке графика, в которой нужно определить производную (см. рис. 2). Очевидно, что единица измерения производной будет равна отношению единиц измерения величин y и x. На рис. 6 представлен экспериментальный график зависимости температуры Т остывающего нагретого тела от времени t, прошедшего от начала охлаждения. Скорость уменьшения температуры – скорость охлаждения – найдена на графике при температуре 180 С, до которой охладилось тело за 60 секунд. Производная здесь, конечно, отрицательна, поскольку функция (температура) убывающая. Модуль скорости охлаждения при этой температуре (см. рис. 6) равен 1,12 С/с.
Контрольные вопросы
Чем определяется точность числовых данных в таблице наблюдений?
С какой точностью следует производить расчёты?
Как определяется число значащих цифр?
Как определяются абсолютная и относительная погрешности прямых измерений?
До скольких значащих цифр следует округлять значения средних погрешностей измерений?
Как проводится кривая (прямая) на графике?
Каким требованиям должен отвечать масштаб, нанесенный на осях координат при графической обработке данных?
С какой точностью указываются координаты катетов при определении углового коэффициента? В каких единицах измеряется угловой коэффициент?
Как изменяется скорость охлаждения (см. рис. 6) при остывании тела?
Работа № 1. Изучение законов сохранения при соударении тел
Цель работы: исследовать поведение тел при ударе, проверить законы сохранения импульса и энергии.
Оборудование: лабораторная установка, набор тел, линейка, транспортир.
Теория метода и описание установки
Напомним некоторые основные понятия.
Механическая система – это совокупность материальных тел, которые рассматриваются как единое целое. Замкнутой (или изолированной) называют механическую систему, на которую не действуют внешние силы. В дальнейшем будем полагать, что система состоит из материальных точек, тогда можно не учитывать собственное вращение тел и связанные с ним энергию и момент импульса.
Импульс системы тел равен векторной сумме импульсов тел, образующих систему:
|
|
(1.1) |
где N – число тел, входящих в систему; mi, i – масса и скорость тела с номером i.
Кинетическая энергия системы равна сумме кинетических энергий тел, входящих в систему. Для системы, состоящей из материальных точек,
|
|
(1.2) |
Полная механическая энергия системы равна сумме кинетических энергий (1.2) и суммарной потенциальной энергии Wp взаимодействия тел:
|
Wмех = Wk + Wp . |
(1.3) |
Если тела системы не взаимодействуют между собой, то второе слагаемое здесь обращается в 0 и полная механическая энергия системы равна её кинетической энергии (1.2).
Законы сохранения формулируют для замкнутой системы тел.
Закон сохранения импульса (ЗСИ). Импульс замкнутой системы тел не изменяется при любых преобразованиях внутри системы:
|
|
(1.4) |
Так как импульс системы – векторная величина, то сохраняются и модуль, и направление суммарного импульса.
Закон сохранения механической энергии (ЗСМЭ). Полная механическая энергия системы не изменяется, если между телами системы действуют только консервативные силы:
|
|
(1.5) |
Удар – это кратковременное взаимодействие тел, в результате которого происходит перераспределение их кинетической энергии. В физике под ударом понимают такой тип взаимодействия движущихся тел, при котором временем взаимодействия можно пренебречь.
При ударе выполняются закон сохранения импульса (ЗСИ) и закон сохранения момента импульса, но обычно не выполняется закон сохранения механической энергии, часть которой обычно уходит на нагрев тел. Отношение кинетической энергии (Wk)кон системы после удара к кинетической энергии (Wk)нач этой системы до удара называют коэффициентом восстановления кинетической энергии:
|
|
(1.6) |
Коэффициент K является характеристикой упругих свойств материала, из которого изготовлены соударяющиеся тела.
Абсолютно упругий удар – модель соударения, при которой полная кинетическая энергия системы сохраняется и, следовательно, k = 1. Хорошей моделью абсолютно упругого удара является столкновение бильярдных шаров или упругих мячиков. ЗСИ для абсолютно упругого удара двух тел
|
|
(1.7) |
Абсолютно неупругий удар – модель соударения, при которой тела после удара движутся как единое целое, т.е. с одной скоростью. При таком ударе механическая энергия не сохраняется, k < 1. Энергия, конечно, никуда не исчезает, а переходит в тепловую. ЗСИ для абсолютно неупругого удара двух тел
|
|
(1.8) |
В
последних формулах
![]() – скорости тел перед ударом;
– скорости тел перед ударом;![]() – скорости тел после удара. Хорошая
модель абсолютно неупругого удара –
сталкивающиеся пластилиновые шарики
(правда, не замороженные).
– скорости тел после удара. Хорошая
модель абсолютно неупругого удара –
сталкивающиеся пластилиновые шарики
(правда, не замороженные).
Установка для проведения лабораторной работы представляет собой горизонтально расположенную прямоугольную пластину, на рабочем поле которой закрепляется миллиметровая бумага (рис. 1.1). Размер рабочего поля соответствует формату А4. За пределами рабочего поля посередине короткой стороны расположен пружинный пистолет, сообщающий телу 1 начальную скорость, которую можно изменять, регулируя степень сжатия пружины. К установке прилагается набор тел одинакового диаметра, но с разными массами.
В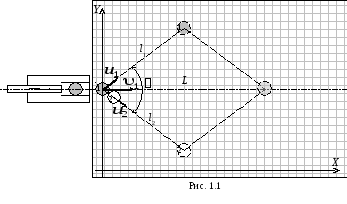 некоторой точке на пути тела 1
экспериментатор располагает неподвижное
тело 2. При ударе тела разлетаются под
углом
с начальными скоростями
некоторой точке на пути тела 1
экспериментатор располагает неподвижное
тело 2. При ударе тела разлетаются под
углом
с начальными скоростями
![]() ,
,![]() и пробегают до остановки отрезки путиl1
и l2
, по длине
которых можно определить значения u1
,
u2
.
и пробегают до остановки отрезки путиl1
и l2
, по длине
которых можно определить значения u1
,
u2
.
При скольжении тела по горизонтальной поверхности сила трения на пути l совершает работу
|
Атр = – mgl, |
(1.9) |
которая равна приращению Wk кинетической энергии тела. Так как конечная скорость тела равна нулю, то
|
Атр
= Wk
=
|
(1.10) |
Отсюда начальная скорость тела, прошедшего до остановки путь l,
|
|
(1.11) |
Для нашего случая начальные скорости тел после удара
|
|
(1.12) |
Скорость 1 первого тела непосредственно перед ударом можно найти по длине L его свободного пробега (см. рис. 1.1):
|
|
(1.13) |
Так как скорость второго тела до удара 2 = 0, то закон сохранения импульса будет иметь вид
|
|
(1.14) |
Обозначим модуль импульса системы до удара Рдо, после удара – Рпосле. В соответствии с законом сохранения импульса Рдо = Рпосле , и их отношение должно быть равно единице. Очевидно, что
|
Pдо
=
|
(1.15) |
Модуль
суммы двух векторов ![]() =Рпосле
найдём по теореме косинусов:
=Рпосле
найдём по теореме косинусов:
|
|
(1.16) |
С учётом (1.12), (1.13), после несложных преобразований
|
|
(1.17) |
 .
.Из формул (1.18), (1.20) получим
|
|
(1.18) |
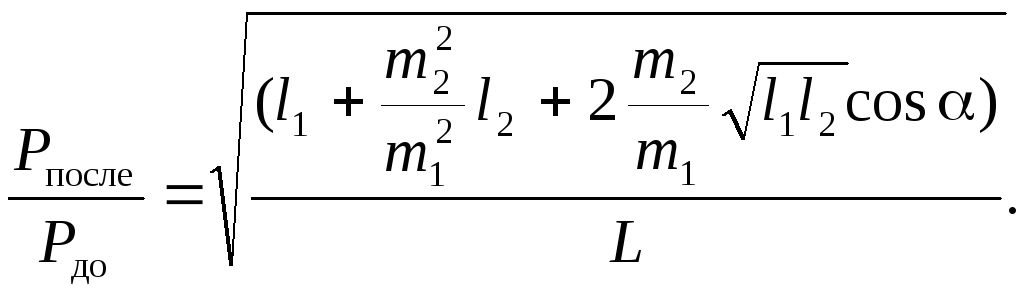
Таким образом, для проверки выполнения ЗСИ в нашем опыте достаточно знать отношение масс соударяющихся тел, пройденные ими расстояния и угол разлёта .
Для определения коэффициента восстановления k выразим кинетические энергии через измеряемые величины. До удара кинетическая энергия системы
|
|
(1.19) |
После удара
|
|
(1.20) |
Коэффициент восстановления кинетической энергии
|
|
(1.21) |