

15.Приведение плоской системы сил к центру
Т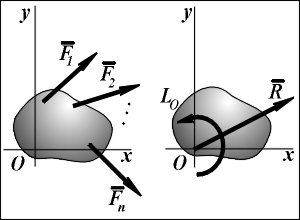 еорема
о приведении системы сил:
еорема
о приведении системы сил:
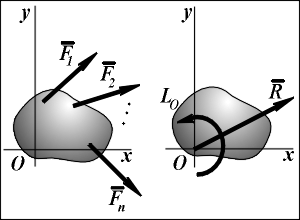
Любая система сил, действующих на абсолютно твердое тело, может быть заменена одной силой R, равной главному вектору этой системы сил и приложенной к произвольно выбранному центру О, и одной парой сил с моментом LO, равным главному моменту системы сил относительно центра О.
Такая эквивалентная замена данной системы сил силой R и парой сил с моментом LO называютприведением системы сил к центу О.
Рассмотрим здесь частный случай приведения плоской системы сил к центру О, лежащему в той же плоскости. В этом случае система сил заменяется одной силой и одной парой сил, лежащих в плоскости действия сил системы. Момент этой пары сил можно рассматривать как алгебраическую величину LO и изображать на рисунках дуговой стрелкой ( алгебраический главный момент плоской системы сил ).
В результате приведения плоской системы сил к центру возможны следующие случаи:
если R = 0, LO = 0, то заданная система является равновесной;
если хотя бы одна из величин R или LO не равна нулю, то система сил не находится в равновесии. При этом:
Eсли R = 0 и LO
 0,
то система сил приводится к одной паре
сил с моментом LO,
причем в этом случае величина
момента LO не
зависит от выбора центра О.
0,
то система сил приводится к одной паре
сил с моментом LO,
причем в этом случае величина
момента LO не
зависит от выбора центра О.Eсли R
 0,
то при любом значении LO система
сил приводится к равнодействующей
силе.
0,
то при любом значении LO система
сил приводится к равнодействующей
силе.
16 Вопрос. Уравнение равновесия
Для равновесия твердрго тела, находящегося под действием плоской системы сил,необходимо и достаточно, чтобы главный вектор этой системы сил и ее алгебраический главный момент были равны нулю, то есть R = 0, LO = 0, где О - любой центр, расположенный в плоскости действия сил системы.
Вытекающие отсюда аналитические условия равновесия (уравнения равновесия) плоской системы сил можно сформулировать в следующих трех формах:
Основная форма уравнений равновесия:
для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы суммы проекций всех сил на каждую из координатных осей и сумма их алгебраических моментов относительно любого центра, лежащего в плоскости действия сил, были равны нулю:
![]() Fix =
0;
Fix =
0; ![]() Fiy =
0;
Fiy =
0; ![]() MO(Fi)
= 0. (I)
MO(Fi)
= 0. (I)
Вторая форма уравнений равновесия:
для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы суммы алгебраических моментов всех сил относительно двух центров А и В и сумма их проекций на ось Ox, не перпендикулярную оси Ox, были равны нулю:
![]() Fix =
0;
Fix =
0; ![]() MА(Fi)
= 0;
MА(Fi)
= 0; ![]() MВ(Fi)
= 0. (II)
MВ(Fi)
= 0. (II)
Третья форма уравнений равновесия (уравнения трех моментов):
для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы суммы алгебраических моментов всех сил относительно любых трех центров А,В и С, не лежащих на одной прямой, были равны нулю:
![]() MА(Fi)
= 0;
MА(Fi)
= 0; ![]() MВ(Fi)
= 0;
MВ(Fi)
= 0; ![]() MС(Fi)
= 0. (III)
MС(Fi)
= 0. (III)
Уравнения равновесия в форме (I) считаются основными, так как при их использовании нет никаких ограничений на выбор координатных осей и центра моментов.
17 Вопрос
Теорема Вариньона. Если рассматриваемая плоская система сил приводится к равнодействующей, то момент этой равнодействующей относительно какой-либо точки равен алгебраической сумме моментов всех сил данной системы относительно той оке самой точки.Предположим, что система сил приводится к равнодействующей R, проходящей через точку О. Возьмем теперь в качестве центра приведения другую точку O1. Главный момент (5.5) относительно этой точки равен сумме моментов всех сил: MO1Z=åMo1z(Fk) (5.11). С другой стороны, имеем MO1Z=MOlz(R), (5.12) так как главный момент для центра приведения О равен нулю (MOz=0). Сравнивая соотношения (5.11) и (5.12), получаем MO1z(R)=åMOlZ(Fk); (5.13) ч.т.д. При помощи теоремы Вариньона можно найти уравнение линии действия равнодействующей. Пусть равнодействующая R1 приложена в какой-либо точке О1 с координатами х и у (рис. 5.5) и известны главный вектор Fo и главный момент МОя при центре приведения в начале координат. Так как R1=Fo, то составляющие равнодействующей по осям х и у равны Rlx=FOx=FOxi и Rly=FOy=Foyj. Согласно теореме Вариньона момент равнодействующей относительно начала координат равен главному моменту при центре приведения в начале координат, т. е. Моz=MOz(R1)=xFOy–yFOx. (5.14). Величины MOz, FOx и Foy при переносе точки приложения равнодействующей вдоль ее линии действия не изменяются, следовательно, на координаты х и ув уравнении (5.14) можно смотреть как на текущие координаты линии действия равнодействующей. Таким образом, уравнение (5.14) есть уравнение линии действия равнодействующей. При Fox≠0 его можно переписать в виде y=(Foy/Fox)x–(Moz/Fox).