

26. Момент силы относительно оси. Аналитическое выражение момента силы относительно оси.
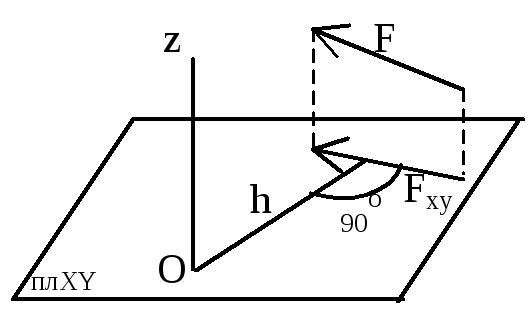
Моментом силы относительно осиназывается момент проекции силы на плоскость, перпендикулярную оси, относительно точки пересечения оси с этой плоскостью
![]()
Момент относительно оси положителен, если сила стремится вращать плоскость перпендикулярную оси против часовой стрелки, если смотреть навстречу оси.
Момент силы относительно оси равен 0 в двух случаях:
Если сила параллельна оси
Если сила пересекает ось
Если линия действия и ось лежат в одной плоскости, то момент силы относительно оси равен 0.
27. Связь между моментом силы относительно оси и векторным моментом силы относительно точки.
Mz(F)=Mo(F)*cosαМомент силы, относительно оси равен прекции вектора момента сил, относительно точки оси на эту ось.
28. Основная теорема статики о приведении системы сил к заданному центру (теорема Пуансо). Главный вектор и главный момент системы сил.
Всякую пространственную систему сил в общем случае можно заменить эквивалентной системой, состоящей из одной силы, приложенной в какой-либо точке тела (центре приведения) и равной главному вектору данной системы сил, и одной пары сил, момент которой равен главному моменту всех сил относительно выбранного центра приведения.
Главным вектором системы сил называется вектор R, равный векторной сумме этих сил:
R = F1 + F2 +
... + Fn = ![]() Fi.
Fi.
Для плоской системы сил ее главный вектор лежит в плоскости действия этих сил.
Главным моментом системы сил относительно центра O называется вектор LO, равный сумме векторных моментов этих сил относительно точки О:
LO = MO(F1)
+ MO(F2)
+ ... + MO(Fn)
= ![]() MO(Fi).
MO(Fi).
Вектор R не зависит от выбора центра О, а вектор LO при изменении положения центра О может в общем случае изменяться.
Теорема Пуансо: Произвольную пространственную систему сил можно заменить одной силой главным вектором системы сил и парой сил с главным моментом не нарушая состояния твердого тела. Главный вектор представляет собой геометрическую сумму всех сил действующих на твердое тело и расположен в плоскости действия сил. Главный вектор рассматривается через его проекции на оси координат.
Чтобы привести силы к заданному центру приложенному в некоторой точке твердого тела необходимо: 1) перенести параллельно силу самой себе к заданному центру не изменяя модуля силы; 2) в заданном центре приложить пару сил, векторный момент которой равен векторному моменту перенесенной силы относительного нового центра, эту пару называют присоединенной парой.
Зависимость главного момента от выбора центра приведения. Главный момент относительно нового центра приведения равен геометрической сумме главного момента относительно старого центра приведения и векторного произведения радиуса-вектора, соединяющего новый центр приведения со старым, на главный вектор.
29 Частные случаи приведения пространственной системы сил
|
№ |
Значения главного вектора и главного момента |
Результат приведения |
|
1 |
|
Система сил
приводится к паре сил, момент которой
равен главному моменту |
|
2 |
|
Система сил
приводится к равнодействующей,
равной |
|
3 |
|
Система сил
приводится к равнодействующей |
|
4 |
|
Система сил
приводится к динаме (силовому винту)
– совокупности силы |
|
5 |
|
Система сил, приложенных к твердому телу, является уравновешивающейся. |
30. Приведение к
динаме.Динамой в механике
называют такую совокупность силы![]() и
пары сил (
и
пары сил (![]() ) действующих
на твердое тело, у которой сила
перпендикулярна плоскости действия
пары сил. Используя векторный момент
) действующих
на твердое тело, у которой сила
перпендикулярна плоскости действия
пары сил. Используя векторный момент![]() пары
сил
пары
сил![]() , можно
также определить динаму как совокупность
силы и пары, у которы сила параллельна
векторному моменту пары сил.
, можно
также определить динаму как совокупность
силы и пары, у которы сила параллельна
векторному моменту пары сил.
 Уравнение
центральной винтовой осиПредположим,
что в центре приведения, принятом за
начало координат, получены главный
вектор
Уравнение
центральной винтовой осиПредположим,
что в центре приведения, принятом за
начало координат, получены главный
вектор ![]() с
проекциями на оси координат
с
проекциями на оси координат ![]() и
главный момент
и
главный момент ![]() с
проекциями
с
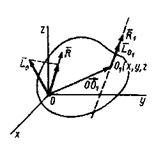
проекциями ![]() При
приведении системы сил к центру
приведения О1 (рис.
30) получается динама с главным вектором
При
приведении системы сил к центру
приведения О1 (рис.
30) получается динама с главным вектором ![]() и
главным моментом
и
главным моментом ![]() ,
Векторы
,
Векторы ![]() и
и ![]() как
образующие линаму. параллельны и поэтому
могут отличаться только скалярным
множителем k0. Имеем,, так
как
как
образующие линаму. параллельны и поэтому
могут отличаться только скалярным
множителем k0. Имеем,, так
как ![]() .Главные
моменты и
.Главные
моменты и ![]() , удовлетворяют
соотношению
, удовлетворяют
соотношению
![]()
![]()
Подставляя ![]() ,
получим
,
получим
![]()
Координаты
точки О1 в
которой получена динама, обозначим
х, у, z.
Тогда проекции вектора ![]() на
оси координат равны координатам х,
у, z.
Учитывая это, (*) можно выразить в форме
на
оси координат равны координатам х,
у, z.
Учитывая это, (*) можно выразить в форме
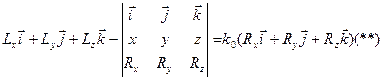
где i.
j ,k - единичные
векторы осей координат, а векторное
произведение ![]() *
*![]() представлено
определителем. Векторное уравнение
(**) эквивалентно трем скалярным, которые
после отбрасывания
представлено
определителем. Векторное уравнение
(**) эквивалентно трем скалярным, которые
после отбрасывания ![]() можно
представить в виде
можно
представить в виде
![]()
Полученные линейные уравнения для координат х, у, z являются уравнениями прямой линии - центральной винтовой оси. Следовательно, существует прямая, в точках которой система сил приводится к динаме.