

46.Скорости и ускорения точек вращающегося тела.
1. Скорости точек тела. Рассмотрим какую-нибудь точку М твердого тела, находящуюся на расстоянии h от оси вращения (см. рис.9). При вращении тела точка М будет описывать окружность радиуса h, плоскость которой перпендикулярна оси вращения, а центр С лежит на самой оси. Если за время dt происходит элементарный поворот тела на угол dφ, то точка М при этом совершает вдоль своей траектории элементарное перемещение ds=hdφ. Тогда числовое значение скорости точки будет равно отношению ds к dt, т.е
![]()
Скорость ![]() в
отличие от угловой скорости тела называют
иногда еще линейной
или окружной скоростью точки М.
в
отличие от угловой скорости тела называют
иногда еще линейной
или окружной скоростью точки М.
Таким образом, числовое значение скорости точки вращающегося твердого тела равно произведению угловой скорости тела на расстояние от этой точки до оси вращения.
Направлена скорость по касательной к описываемой точкой окружности или перпендикулярно плоскости, проходящей через ось вращения и точку М.
Так
как для всех точек тела ![]() имеет
в данный момент времени одно и то же
значение, то скорости точек вращающегося
тела пропорциональны их расстояниям
от оси вращения.
имеет
в данный момент времени одно и то же
значение, то скорости точек вращающегося
тела пропорциональны их расстояниям
от оси вращения.
Скорость и ускорение точки вращающегося тела
Следовательно, линейная скорость любой точки вращающегося тела равна произведению угловой скорости на расстояние от данной точки до оси вращения. Направлена эта скорость всегда по касательной к окружности, которую описывает данная точка при своем движении.
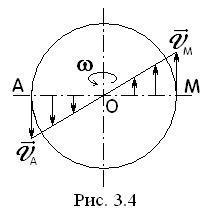 В
каждый данный момент времени угловые
скорости точек вращающегося тела равны.
Поэтому линейные скорости точек тела
пропорциональны их расстоянию до оси
(рис.3.4), т.е. скорость изменяется
полинейному закону.
В
каждый данный момент времени угловые
скорости точек вращающегося тела равны.
Поэтому линейные скорости точек тела
пропорциональны их расстоянию до оси
(рис.3.4), т.е. скорость изменяется
полинейному закону.
Т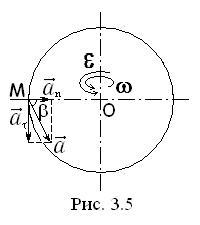 ак
как точки тела совершают криволинейное
движение (траектории точек - окружности),
то полное ускорение слагается из
нормального и касательного ускорений
ак
как точки тела совершают криволинейное
движение (траектории точек - окружности),
то полное ускорение слагается из
нормального и касательного ускорений![]() ,
которыеопределяются
,
которыеопределяются ![]() ,
,
![]()
![]() ,
,
![]() (3.14)
(3.14)
Таким
образом полное ускорение точки
будет ![]()
 (3.15) Из
формул (3.15) следует, что полное ускорение
точки вращающегося тела пропорционально
ее расстоянию до оси вращения.
(3.15) Из
формул (3.15) следует, что полное ускорение
точки вращающегося тела пропорционально
ее расстоянию до оси вращения.
При
вращательном движении тела вокруг оси
нормальное ускорение ![]() называют
еще центростремительным
называют
еще центростремительным ![]() (вектор
направлен по радиусу к центру
кривизны), касательное
ускорение
(вектор
направлен по радиусу к центру
кривизны), касательное
ускорение ![]() называют
и иначе – вращательным ускорением
называют
и иначе – вращательным ускорением ![]() (вектор
ускорения направлен по касательной).
(вектор
ускорения направлен по касательной).
47.Скорость и ускорение точки при векторном способе заданиядвижения
С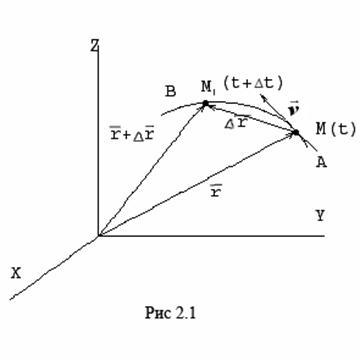 корость
точки – это величина, характеризующая
как быстро и в каком направлении меняется
положение точки в пространстве. Поскольку
она определяет направление перемещения
точки, скорость является величиной
векторной. Пусть за время Δt радиус-вектор
точки М изменился на величину Δ
корость
точки – это величина, характеризующая
как быстро и в каком направлении меняется
положение точки в пространстве. Поскольку
она определяет направление перемещения
точки, скорость является величиной
векторной. Пусть за время Δt радиус-вектор
точки М изменился на величину Δ![]() . Тогда
средней скоростью называется векторная
величина
. Тогда
средней скоростью называется векторная
величина ![]() (2.1)
(2.1)
Этот
вектор направлен так же, как и ![]() .
Предельное значение
.
Предельное значение ![]() ,
при стремящемся к нулю
,
при стремящемся к нулю ![]() ,
определит мгновенное значение скорости
в данный момент времени
,
определит мгновенное значение скорости
в данный момент времени
![]() (2.2)
(2.2)
При
стремлении ![]() к
нулю хорда ММ1,
а значит и вектор
к
нулю хорда ММ1,
а значит и вектор ![]() поворачивается
вокруг точки М, приближаясь к касательной
к траектории в точке М и в пределе,
совпадая с ней. Поэтому вектор
поворачивается
вокруг точки М, приближаясь к касательной
к траектории в точке М и в пределе,
совпадая с ней. Поэтому вектор ![]() направлен
по касательной к траектории точки в
сторону движения.
направлен
по касательной к траектории точки в
сторону движения.
В
общем случае криволинейного движения
вектор скорости изменяется по величине
и направлению в функции времени.
Следовательно, за время ![]() вектор
вектор ![]() можно
представить в виде
можно
представить в виде ![]() . Ускорение точки
в криволинейном движении характеризует
быстроту изменения вектора
. Ускорение точки
в криволинейном движении характеризует
быстроту изменения вектора ![]() по
величине и направлению. Тогда средняя
величина ускорения определится
по
величине и направлению. Тогда средняя
величина ускорения определится ![]() ,
а мгновенное значение
,
а мгновенное значение ![]() ,
или
,
или
![]() (2.3)
(2.3)