

61. Сложение скоростей при сложном движении точки.
При сложном движении материальной точки её абсолютная скорость равна сумме относительной и переносной скоростей.
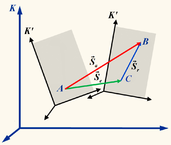
Движение точки можно рассматривать, как состоящее из двух движений: первое — движение относительно движущейся системы отсчёта, второе — движение вместе с движущейся системой относительно неподвижной. Такое движение точки называют сложным или составным.
Пусть
материальная точка в некоторый момент
времени находилась в точке А, а через
промежуток времени ![]() оказалась
в точке В (см. рис.). Тогда её перемещение
относительно системы К (абсолютное
перемещение) будет равно
оказалась
в точке В (см. рис.). Тогда её перемещение
относительно системы К (абсолютное
перемещение) будет равно ![]() .
Точка А подвижной системы K' за время
переместилась вместе с K' и оказалась в
точке С, совершив перемещение относительно
системы К (переносное перемещение),
изображённое на рисунке вектором
.
Точка А подвижной системы K' за время
переместилась вместе с K' и оказалась в
точке С, совершив перемещение относительно
системы К (переносное перемещение),
изображённое на рисунке вектором ![]() .
С точки зрения наблюдателя, связанного
с системой K', точка С является той точкой,
в которой МТ находилась первоначально,
поэтому вектор
.
С точки зрения наблюдателя, связанного
с системой K', точка С является той точкой,
в которой МТ находилась первоначально,
поэтому вектор ![]() представляет
собой перемещение МТ относительно
подвижной системы K', то есть относительное
перемещение. Из сказанного и векторной
диаграммы на рисунке следует
представляет
собой перемещение МТ относительно
подвижной системы K', то есть относительное
перемещение. Из сказанного и векторной
диаграммы на рисунке следует
![]()
Деля
данное равенство на промежуток времени ![]() ,
а затем устремляя его к нулю, в пределе
получаем
,
а затем устремляя его к нулю, в пределе
получаем
![]()
где ![]() —
абсолютная,
—
абсолютная, ![]() —
переносная, а
—
переносная, а ![]() —
относительная скорость движения МТ.
—
относительная скорость движения МТ.
Полученное равенство является математическим выражением теоремы о сложении скоростей, которая формулируется так:
При сложном движении абсолютная скорость материальной точки равна геометрической сумме переносной и относительной скоростей.
62,63,64
Когда_равна_нулю Для определения направления кориолисова ускорения нужно спроецировать вектор относительной скорости в плоскость, перпендикулярную вектору переносной угловой скорости и полученную проекцию повернуть на в сторону переносного вращения (рисунок 3.4).
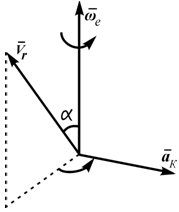
Рисунок 3.4
Из формулы (3.5) видно, что кориолисово ускорение равно нулю, если
- равна нулю относительная скорость;
- переносное движение - поступательное (ωe=0 );
- угол между ωe и Vr равен 0o или 180o (вектор Vr параллелен оси переносного вращения).
Определение_направления_и_модуля . Определение модуля и направления кориолисова ускорения
![]() (24)
(24)
Известно, что модуль векторного произведения двух векторов равен
![]() (25)
(25)
Если![]() то
то
![]() (26)
(26)
Для определения
направления вектора кориолисоваускорения
![]() надоспроектировать
вектор
надоспроектировать
вектор![]() относительной скорости точки
относительной скорости точки![]() на
плоскость,перпендикулярную вектору
на
плоскость,перпендикулярную вектору![]() (оси
переносного вращения), и полученную
проекциюповернуть в сторону этого
вращения на
(оси
переносного вращения), и полученную
проекциюповернуть в сторону этого
вращения на![]() .Полученное
таким образомнаправление совпадает с
направлением вектора
.Полученное
таким образомнаправление совпадает с
направлением вектора![]() (рис.
2, 3 и 4).Если точка
(рис.
2, 3 и 4).Если точка![]() движется в плоскости, перпендикулярной
оси переносного вращения (вектору
движется в плоскости, перпендикулярной
оси переносного вращения (вектору![]() ,
то
,
то![]() и формула (26) становится такой
и формула (26) становится такой
![]() (27)
(27)

Рис. 3. К определению направления вектор кориолисоваускорения при движении точки в пространстве
Кориолисово ускорение обращается в нуль, если:
1. ![]() -
переносное движение поступательно или
когда в данный момент
-
переносное движение поступательно или
когда в данный момент![]()
2. ![]() - относительная скорость в данный момент
равна нулю.
- относительная скорость в данный момент
равна нулю.
3. Когда ![]() или
или![]() ,
то есть когда вектор
,
то есть когда вектор![]() параллелен вектору
параллелен вектору![]() .
.
А теперь рассмотрим
фазы движения материальной точки вдоль
горизонтально вращающегося стержня и
покажем, что при совпадении вектров![]() и
и![]() кориолисово
ускорение выполняет функции ускорения,
а когда эти векторы противоположны, то
оно выполняет функции замедления
кориолисово
ускорение выполняет функции ускорения,
а когда эти векторы противоположны, то
оно выполняет функции замедления![]() (рис.
4). Вариации возможных сочетаний
направления вектров переносной
(рис.
4). Вариации возможных сочетаний
направления вектров переносной![]() и
относительной скоростей
и
относительной скоростей![]() материальной точки, движущейся вдоль
вращающегося стержня, представлены на
рис. 4.
материальной точки, движущейся вдоль
вращающегося стержня, представлены на
рис. 4.
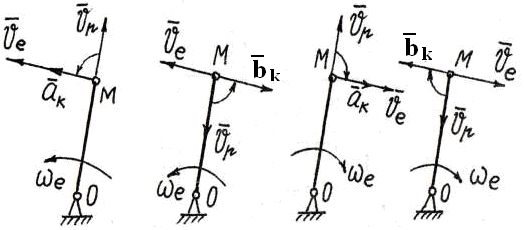
Рис. 4. Примеры
определения направления векторов![]() и
и![]() для
точки
для
точки![]()
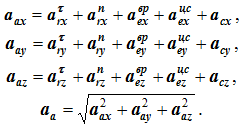
Абсолютное ускорение точки в сложном движении в общем случае определяется геометрической суммой пяти слагаемых
![]()
Для определения величины абсолютного ускорения удобнее пользоваться аналитическим методом сложения векторов:
Ускорение кориолиса
Ускорение
Кориолиса ![]() можно
получить, спроецировав вектор относительной
скорости точки
можно
получить, спроецировав вектор относительной
скорости точки ![]() на
плоскость, перпендикулярную вектору
переносной угловой скорости
на
плоскость, перпендикулярную вектору
переносной угловой скорости ![]() ,
увеличив полученную проекцию в
,
увеличив полученную проекцию в ![]() раз
и повернув её на 90 градусов в направлении
переносного вращения.
раз
и повернув её на 90 градусов в направлении
переносного вращения.
Способы вычисления ускорения Кориолиса:
1. По правилу векторного произведения (рис. 3)
 .
.
Теорема_кориолиса
Пусть
точка совершает сложное
движение: движется
относительно неинерциальной системы
отсчёта ![]() со скоростью
со скоростью ![]() ;
система
;
система ![]() при этом сама движется относительно
инерциальной системы координат
при этом сама движется относительно
инерциальной системы координат ![]() ,
причём линейная скорость движущегося
вместе с ней полюса
,
причём линейная скорость движущегося
вместе с ней полюса ![]() равна
равна ![]() ,
а угловая скорость системы
,
а угловая скорость системы ![]() равна
равна ![]() .
.
Тогда абсолютная скорость рассматриваемой точки (то есть её линейная скорость в инерциальной системе координат) будет такой:
![]() ,
причём
,
причём ![]() ,
,
где ![]() —
радиус-вектор точки относительно
полюса
—
радиус-вектор точки относительно
полюса ![]() .
Первые два слагаемых в правой части
равенства представляют собойпереносную
скорость точки, а
последнее — её относительную
скорость.
.
Первые два слагаемых в правой части
равенства представляют собойпереносную
скорость точки, а
последнее — её относительную
скорость.
Продифференцируем это равенство по времени:
![]()
Найдём значение каждого слагаемого в инерциальной системе координат:
![]()

![]()
где ![]() —
линейное ускорение точки относительно
системы
—
линейное ускорение точки относительно
системы![]() ,
, ![]() —
угловое ускорение системы
—
угловое ускорение системы ![]() .
.
Таким образом, имеем:
![]()
Полученное
равенство служит математическим
выражениемтеоремыКориолиса: Абсолютное
ускорение точки в сложном движении
равно геометрической сумме её переносного
ускорения (сумма
первых трёх слагаемых в правой
части),относительного
ускорения (четвёртое
слагаемое) и добавочного кориолисова
ускорения (последнее
слагаемое), равного ![]() .
.
Используя
обозначения ![]() и
и ![]() ,
получим запись теоремы Кориолиса в
более сжатом виде:
,
получим запись теоремы Кориолиса в
более сжатом виде:
![]()
Причиной возникновения кориолисова ускорения является взаимное влияние друг на друга переносного и относительного движений.
Сам Кориолис выражал в 1835 г. свои результаты в иной форме, вводя в рассмотрение переносную и кориолисову силы инерции; общепринятая же ныне чисто кинематическая формулировка теоремы Кориолиса предложена в 1862 г. Анри ЭмеРезалем[12].
Заметим,
что если система ![]() также является неинерциальной и движется
относительно другой системы, а та другая
относительно следующей и т. д., то
величины
также является неинерциальной и движется
относительно другой системы, а та другая
относительно следующей и т. д., то
величины ![]() ,
, ![]() для
системы
для
системы ![]() в последнем уравнении следует считать
полными — то есть как сумму собственных
ускорений (скоростей) всех систем
координат (каждой относительно
предыдущей), начиная с первой подвижной
системы, а
в последнем уравнении следует считать
полными — то есть как сумму собственных
ускорений (скоростей) всех систем
координат (каждой относительно
предыдущей), начиная с первой подвижной
системы, а ![]() —
абсолютным ускорением поступательного
движения
—
абсолютным ускорением поступательного
движения ![]() относительно неподвижной инерциальной
системы координат.
относительно неподвижной инерциальной
системы координат.
Заметим
также, что в частности, чтобы точка
относительно неинерциальной системы
отсчёта двигалась прямолинейно по
радиусу к оси вращения (см. рис.), необходимо
приложить к ней силу, которая будет
противодействующей суммы Кориолисовойсилы ![]() ,
переносной вращательной силы
,
переносной вращательной силы ![]() и
переносной силы инерции поступательного
движения системы отсчёта
и
переносной силы инерции поступательного
движения системы отсчёта ![]() .
Составляющая же ускорения
.
Составляющая же ускорения ![]() не
отклонит тело от этой прямой, так как
являетсяосестремительным
переносным ускорением и
всегда направлена по этой
прямой. Действительно, если рассматривать
уравнение такого движения, то после
компенсации в нём вышеупомянутых сил
получится уравнение
не
отклонит тело от этой прямой, так как
являетсяосестремительным
переносным ускорением и
всегда направлена по этой
прямой. Действительно, если рассматривать
уравнение такого движения, то после
компенсации в нём вышеупомянутых сил
получится уравнение ![]() ,
которое если умножить векторно на
,
которое если умножить векторно на ![]() ,
то с учетом
,
то с учетом ![]() получим
относительно
получим
относительно ![]() дифференциальное
уравнение
дифференциальное
уравнение  ,
имеющее при любых
,
имеющее при любых ![]() и
и ![]() общим
решением
общим
решением ![]() ,
которое и является уравнением такой
прямой —
,
которое и является уравнением такой
прямой — ![]() .
.