

Тема 2. Связи и их реакции
Тело, которое может совершать из данного положения любые перемещения в пространстве, называется свободным.
Тело, перемещениям которого препятствуют какие-нибудь другие, скрепленные или соприкасающиеся с ним тела, называется несвободным. Все то, что ограничивает перемещение данного тела, называют связью.
Сила, с которой данная связь действует на тело, препятствующая тем или иным его перемещениям, называется реакцией связи. Реакция связи направлена в сторону противоположную той, куда связь не дает перемещаться телу.
Принцип освобождаемости от связей: несвободное твердое тело можно рассматривать как свободное, если его мысленно освободить от связей, заменив их действие реакциями. В статике этот принцип позволяет рассматривать равновесие несвободного твердого тела как свободного под действием активных(заданных)сил и реакций связей.
Рассмотрим наиболее часто встречающиеся типы связей на плоскости и направления их реакций.
1. Гладкая плоскость (поверхность) или опора
Реакция N гладкой плоскости (поверхности) или опоры направлена по общей нормали к поверхностям соприкасающихся тел в точке их касания и приложена к этой точке.
2. Гибкая нить (провода, канаты, цепи, ремни)
Реакция Т направлена вдоль нити к точке подвеса.
3. Невесомый стержень с шарнирами
Реакция N невесомого стержня направлена вдоль стержня. Обычно реакция Nизображается от тела по стержню, в предположении, что в равновесии стержень растянут.
4. Неподвижный цилиндрический шарнир илиподшипник
Реакция RAцилиндрического шарнира может иметь любое направление в плоскости, перпендикулярной оси вращения, т. е. в плоскостиАху. Обычно ее раскладывают на две составляющие ХАи YAпо двум взаимноперпендикулярным направлениям.
5. Шарнирно-подвижная опора (опора на катках)
Реакция R проходит через ось шарнира и направлена перпендикулярно к опорной плоскости.
6. Жесткая заделка
Нахождение реакции жесткой заделки сводится к определению составляющих ХАи YAпрепятствующих линейному перемещению балки в плоскости действия сил, и алгебраической величине момента mA, препятствующего вращению балки под действием приложенных к ней сил.
Аксиома связей (принцип освобождения от связей) — одна из аксиом теоретической механики. Может быть сформулирована следующим образом:
Всякое несвободное тело можно рассматривать как свободное, если отбросить связи и заменить их действие реакциями этих связей.
При этом под связью понимается всё то, что ограничивает движение тела.
Простейший пример применения аксиомы связей: если на горизонтальной поверхности (например, на столе) в поле тяжести Земли (то есть, в "обычных" земных условиях) лежит тело, то мы можем мысленно отбросить горизонтальную поверхность и заменить её действие силой реакции этой поверхности.
5. План решения задач(Рассмотреть на примере)
Приступая к решению задания, необходимо разобраться в условии задачи и рисунке, а затем:
1. Составить расчетную схему, которая включает:
- объект равновесия,
- активные (заданные) силы,
- силы реакции, заменяющие действия отброшенных связей.
2. Определить вид полученной системы сил и выбрать, соответствующие ей, уравнения равновесия;
3. Выяснить, является ли задача статически определимой;
4. Составить уравнения равновесия и определить из них силы реакции;
5. Сделать проверку полученных результатов.
При замене связей (опор) силами реакций помнить:
- если связь препятствует перемещению тела только в одном каком-нибудь направлении, то направление ее реакции противоположно этому направлению;
-
если же связь препятствует перемещению
тела по многим направлениям, то силу
реакции такой связи изображают ее
составляющими, показывая их параллельно
выбранным координатным осям ![]() и
и ![]() .
.
Решение уравнений равновесия будет тем проще, чем меньшее число неизвестных будет входить в каждое из них. Поэтому, при составлении уравнений равновесия следует:
1)
координатные оси ![]() и
и ![]() располагать
так, чтобы одна из осей была перпендикулярна
к линии действия хотя бы одной из
неизвестных сил, в этом случае
проекция неизвестной
силы исключается из соответствующего
уравнения равновесия;
располагать
так, чтобы одна из осей была перпендикулярна
к линии действия хотя бы одной из
неизвестных сил, в этом случае
проекция неизвестной
силы исключается из соответствующего
уравнения равновесия;
2) за центр моментов выбирать точку, в которой пересекаются линии действия наибольшего числа неизвестных сил реакций, тогда моменты этих сил не войдут в уравнение моментов.
Если
сила ![]() в
плоскости
в
плоскости ![]() имеет
две составляющие ее силы
имеет
две составляющие ее силы ![]() и
и ![]() ,
то при вычислении момента силы
,
то при вычислении момента силы ![]() вокруг
некоторой точки О,
полезно применить теорему Вариньона,
вычислив сумму моментов составляющих
ее сил относительно этой точки (см. рис.
4).
вокруг
некоторой точки О,
полезно применить теорему Вариньона,
вычислив сумму моментов составляющих
ее сил относительно этой точки (см. рис.
4).
Если к телу в числе других сил приложена пара сил, то ее действие учитывается только в уравнении моментов сил, куда вносится момент этой пары, с соответствующим, знаком.
Пример
1. Шар веса ![]() опирается
в точке
опирается
в точке ![]() на
наклонную плоскость, образующую с
вертикалью угол
на
наклонную плоскость, образующую с
вертикалью угол ![]() ,
и привязан к стене веревкой, которая
образует с вертикалью угол
,
и привязан к стене веревкой, которая
образует с вертикалью угол ![]() (рис.13а).
Определить реакцию плоскости в точке
(рис.13а).
Определить реакцию плоскости в точке ![]() и
натяжение веревки.
и
натяжение веревки.
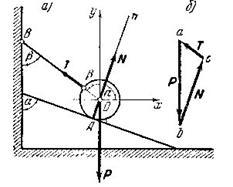
Рис.13
Решение: Обозначим
искомую реакцию плоскости, направленную
по нормали ![]() к
этой плоскости, через
к
этой плоскости, через ![]() ,
а натяжение веревки – через
,
а натяжение веревки – через ![]() .
Линия действия всех трех сил
.
Линия действия всех трех сил ![]() и
и ![]() пересекаются
в центре шара
пересекаются
в центре шара ![]() .
Примем вертикаль и горизонталь в
точке
.
Примем вертикаль и горизонталь в
точке ![]() за
координатные оси и найдем проекции
сил
за
координатные оси и найдем проекции
сил ![]() и
и ![]() на
эти оси:
на
эти оси:
![]() ,
, ![]() ,
, ![]() ,
,
![]() ,
, ![]() ,
, ![]() .
.
Так как данная система сходящихся сил является плоской, то условия равновесия (4) имеют вид
1) ![]()
2) ![]()
Умножив
первое уравнение на ![]() ,
а второе на
,
а второе на ![]() и
сложив их, получим
и
сложив их, получим
![]() .
.
Затем из первого уравнения находим
![]() .
.
В
случае, когда веревка, удерживающая
шар, параллельна наклонной плоскости ![]() ,
получим
,
получим ![]() ,
, ![]() .
.
Для
решения этой же задачи графическим
способом, необходимо построить замкнутый
силовой многоугольник. Построение
силового многоугольника всегда нужно
начинать с известных, заданных сил. Из
произвольной точки ![]() (рис.13б)
проведем вектор
(рис.13б)
проведем вектор ![]() ,
параллельный данной силе
,
параллельный данной силе ![]() ,
длина которого в выбранном масштабе
изображает модуль этой силы. Затем через
точки
,
длина которого в выбранном масштабе
изображает модуль этой силы. Затем через
точки ![]() и
и ![]() проводим
прямые, параллельные линиям действия
искомых сил
проводим
прямые, параллельные линиям действия
искомых сил ![]() и
и ![]() ,
которые пересекутся в точке
,
которые пересекутся в точке ![]() .
Векторы
.
Векторы ![]() и
и ![]() определяют
искомые силы
определяют
искомые силы ![]() и
и ![]() .Чтобы
найти направление искомых сил на силовом
треугольнике , нужно обойти этот
треугольник по его периметру, причем
направление этого обхода определяется
направлением данной силы
.Чтобы
найти направление искомых сил на силовом
треугольнике , нужно обойти этот
треугольник по его периметру, причем
направление этого обхода определяется
направлением данной силы ![]() .
Измерив длину сторон
.
Измерив длину сторон ![]() и
и ![]() и
зная масштаб, в котором построена сила
и
зная масштаб, в котором построена сила ![]() ,
найдем численные значения сил
,
найдем численные значения сил ![]() и
и ![]() .
.