

КМ - Maple
.pdfv1[’x’] := V_отн*cos(phi(1/8)): v1[’y’] := V_отн*sin(phi(1/8)):
> display(pos(phi(1/8), S(1/8), 3/16), plottools[arrow]([x, y],
vector([v1[’x’],v1[’y’]]),
.15, .6, .13, color=green), textplot([x+v1[’x’]+dxy, y+v1[’y’]+dxy,
‘относительная скорость‘], color=green),
scaling=constrained);
Стрелка-направление указывает на относительную скорость. Переносная скорость — это скорость той точки подвижного про-
странства (тела D ), с которой совпадает движущая точка. Значит, чтобы найти переносную скорость, необходимо «заморозить» относительное движение, тогда
Vпер = ωh,
где ω — угловая скорость вращения тела D , h — расстояние до оси вращения.
>omega := unapply(diff(phi(t), t), t);
ω:= t −→ 4 + 3.2t
>V_пер := omega(1/8)*S(1/8)/V_размер:
>v2[’x’] := V_пер(1/8)*cos(Pi/2+phi(1/8)): v2[’y’] := V_пер(1/8)*sin(Pi/2+phi(1/8)):
>display(pos(phi(1/8), S(1/8), 3/16), plottools[arrow]([x, y],
vector([v2[’x’], v2[’y’]]),
.15, .6, .1, color=blue), textplot([x+v2[’x’]+dxy, y+v2[’y’]+dxy,
‘переносная скорость‘], color=blue), scaling=constrained);
101
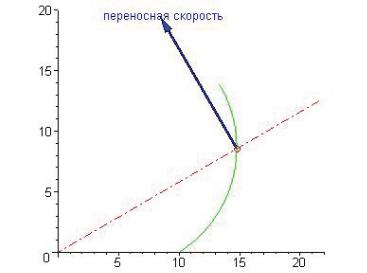
Стрелка-направление указывает на переносную скорость.
Сумма переносной и относительной скоростей есть скорость точки в абсолютном движении. Эта скорость направлена по касательной к траектории.
> display(pos(phi(1/8), S(1/8), 3/16), plottools[arrow]([x, y],
vector([v2[’x’], v2[’y’]]),
.15, .6, .1, color=blue), textplot([x+v2[’x’]+dxy, y+v2[’y’]+dxy,
‘переносная скорость‘], color=blue), plottools[arrow]([x, y],
vector([v1[’x’], v1[’y’]]),
.15, .6, .1, color=green), textplot([x+v1[’x’]+dxy, y+v1[’y’]+dxy,
‘относительная скорость‘], color=green),
plottools[arrow]([x, y], vector([v1[’x’]+v2[’x’],
v1[’y’] + v2[’y’]]),
.15, .6, .1, color=red), textplot([x+v1[’x’]+v2[’x’]+dxy,
y+v1[’y’]+v2[’y’]+dxy, ‘Абсолютная скорость‘], color=red),
scaling=constrained);
102
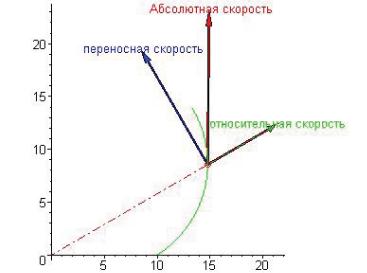
Центральная стрелка указывает на абсолютную скорость. Ближе к оси ординат расположена переносная скорость, а к оси абсцисс — относительная.
>V_абс[’x’] := V_размер*evalf(v1[’x’]+v2[’x’]): V_абс[’y’] := V_размер*evalf(v1[’y’]+v2[’y’]): V_abs := sqrt(V_абс[’x’]^2+V_абс[’y’]^2);
V _abs := 87.26877071
Направляющие косинусы найдем по формулам:
cos(Ox, V ) = |
V _absx |
|
cos(Oy, V ) = |
V _absy |
|
|
, |
|
. |
||
V _abs |
V _abs |
||||
>alpha := V_абс[’x’]/V_abc:
>beta := V_абс[’y’]/V_abc:
Абсолютное ускорение точки есть векторная сумма трех ускорений: относительного, переносного и Кориолиса:
¯ = ¯ + ¯ + ¯
Wабс Wот Wпер Wкор.
Относительное ускорение — это ускорение, возникающее при относительном движении, т.е. при движении точки вдоль тела. Так как точка движется вдоль тела по прямой, то и относительное ускорение направлено вдоль этой прямой.
¯ |
d2 |
|
Wотн = |
2 |
S(t). |
|
dt |
|
> W := unapply(diff(S(t), t, t), t);
W := t −→ −40 sin 2πt · π2
103
>W_размер := 20:
>W_отн := W(1/8)/W_размер: w1[’x’] := W_отн*cos(phi(1/8)): w1[’y’] := W_отн*sin(phi(1/8)):
>display(pos(phi(1/8), S(1/8), 3/16), plottools[arrow]([x, y],
vector([w1[’x’], w1[’y’]]),
.15, .6, .1, color=green), textplot([x+w1[’x’]+dxy, y+w1[’y’]+dxy,
‘относительное ускорение‘], color=green),
scaling=constrained);
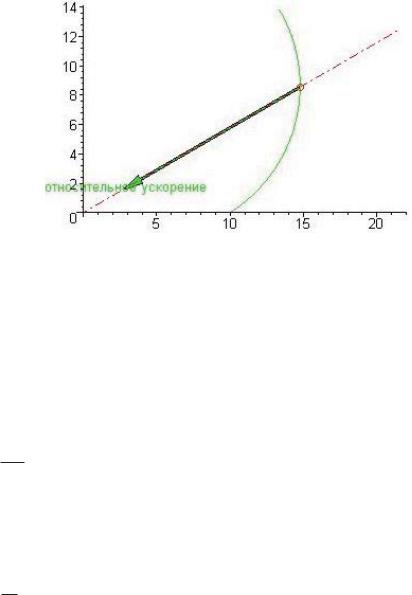
Стрелка-направление указывает на относительное ускорение. Переносное ускорение — это ускорение того места подвижного про-
странства, с которым совпадает движущаяся точка. Следовательно, «замораживаем» относительное движение, а поскольку переносное движение — это вращение тела D по закону ϕ(t) = 4t + 1.6t2 , то переносное ускорение складывается из вращательного и центростремительного.
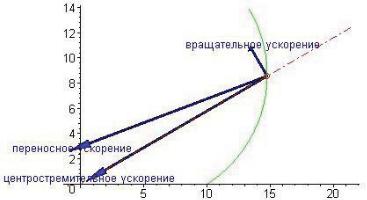
Wвр = εh,
d2
где: ε = dt2 ϕ(t) — угловое ускорение в данный момент времени, а h =
= S(t) — расстояние до оси вращения в данный момент времени. Направлено вращательное ускорение перпендикулярно OM (туда,
куда «укажет» ε ):
Wц = ω2h,
d
где: ω = dtϕ(t) — угловая скорость вращения тела в данный момент. Направлено центростремительное ускорение к оси вращения.
104
>epsilon := unapply(diff(phi(t), t, t), t);
ε= 3.2
>W[‘вр‘] := epsilon(1/8)*S(1/8)/W_размер: W[‘ц‘] := omega(1/8)^2*S(1/8)/W_размер:
>w21[’x’] := W[’вр’]*cos(phi(1/8)+Pi/2): w21[’y’] := W[’вр’]*sin(phi(1/8)+Pi/2): w22[’x’] := W[’ц’]*cos(phi(1/8)+Pi): w22[’y’] := W[’ц’]*sin(phi(1/8)+Pi): w2[’x’] := w21[’x’]+w22[’x’]:
w2[’y’] := w21[’y’]+w22[’y’]:
>display(pos(phi(1/8), S(1/8), 3/16), plottools[arrow]([x, y],
vector([w21[’x’], w21[’y’]]),
.15, .6, .1, color=blue), textplot([x+w21[’x’]+dxy, y+w21[’y’]+dxy,
‘вращательное ускорение‘], color=blue),
plottools[arrow]([x, y],
vector([w22[’x’], w22[’y’]]),
.15, .6, .1, color=blue), plottools[arrow]([x, y],
vector([w2[’x’], w2[’y’]]),
.15, .6, .1, color=blue), textplot([x+w2[’x’]+dxy, y+w2[’y’]+dxy,
‘переносное ускорение‘], color=blue), textplot([x+w22[’x’]+dxy, y+w22[’y’]+dxy,
‘центростремительное ускорение‘], color=blue),
scaling=constrained);
105
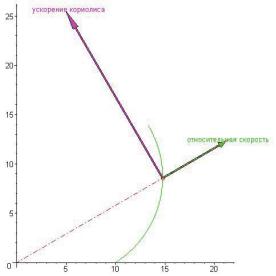
Кориолисово ускорение возникает, когда есть вращательное движение подвижной системы координат, и при этом вектор угловой скорости не коллинеарен вектору скорости относительной.
Кориолисово ускорение равно удвоенному векторному произведению вектора угловой скорости вращения тела и вектора относительной скорости, поэтому величину ускорения Кориолиса определим по формуле
Wкор = 2ωVотн sin γ,
а направление по правилу Жуковского: «Вектор ускорения Кориолиса будет направлен в ту сторону, куда "укажет" вектор относительной скорости, если его повернуть на прямой угол градусов по ходу вращения, показанного угловой скоростью».
>W[‘кор‘] := 2*omega(1/8)*V_отн/W_размер*V_размер:
>w3[’x’] := W[‘кор‘]*cos(phi(1/8)+Pi/2): w3[’y’] := W[‘кор‘]*sin(phi(1/8)+Pi/2):
>display(pos(phi(1/8), S(1/8), 3/16), plottools[arrow]([x, y],
vector([w3[’x’], w3[’y’]]),
.15, .6, .1, color=magenta), textplot([x+w3[’x’]+dxy, y+w3[’y’]+dxy,
‘ускорение кориолиса‘], color=magenta),
plottools[arrow]([x, y],
vector([v1[’x’], v1[’y’]]),
.15, .6, .1, color=green), textplot([x+v1[’x’]+dxy, y+v1[’y’]+dxy,
‘относительная скорость‘], color=green),
scaling=constrained);
106
Ближе к оси OY — ускорение Кориолиса. Вторая стрелка-направ- ление — относительная скорость.
>w_абс[’x’] := evalf(w1[’x’]+w2[’x’]+w3[’x’]): w_абс[’y’] := evalf(w1[’y’]+w2[’y’]+w3[’y’]): w_abs := sqrt(w_абс[’x’]^2+w_абс[’y’]^2);
w_abs := 37.75692035
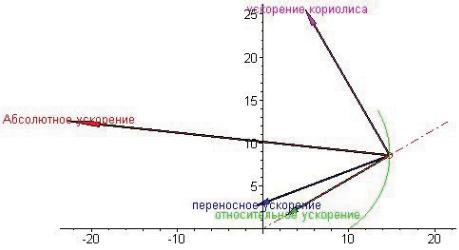
Изобразим три вектора ускорения (относительное переносное и Кориолиса) и их сумму, которая есть ускорение точки в абсолютном движении.
> display(pos(phi(1/8), S(1/8), 3/16), plottools[arrow]([x, y],
vector([w2[’x’], w2[’y’]]),
.15, .6, .1, color=blue), textplot([x+w2[’x’]+dxy, y+w2[’y’]+dxy,
‘переносное ускорение‘], color=blue),
plottools[arrow]([x, y],
vector([w1[’x’], w1[’y’]]),
.15, .6, .1, color=green), textplot([x+w1[’x’]+dxy, y+w1[’y’]+dxy,
‘относительное ускорение‘], color=green),
plottools[arrow]([x, y],
vector([w3[’x’], w3[’y’]]),
.15, .6, .1, color=magenta), textplot([x+w3[’x’]+dxy, y+w3[’y’]+dxy,
‘ускорение кориолиса‘], color=magenta),
plottools[arrow]([x, y], vector([w_абс[’x’],
w_абс[’y’]]),
.15, .6, .1, color=red), textplot([x+w_абс[’x’]+dxy, y+w_абс[’y’]+dxy,
‘Абсолютное ускорение‘], color=red), scaling=constrained);
107
Ответ
>‘Положение точки‘; ’S’ = evalf(S(1/8));
’phi’ = evalf(convert(phi(1/8), degrees)); ‘Угловая скорость тела и угловое ускорение тела‘; ’omega’ = omega(1/8);
’epsilon’ = epsilon(1/8); ‘Абсолютная скорость точки‘; V[’абс,x’] = V_абс[’x’]; V[’абс,y’] = V_абс[’y’]; V[’абс’] = V_abs;
‘Абсолютное ускорение точки‘; W[’абс,x’] = W_размер*w_абс[’x’]; W[’абс,y’] = W_размер*w_абс[’y’]; W[’абс’] = W_размер*w_abs;
Положение точки:
S = 17.07106781
ϕ = 30.08028424
Угловая скорость тела и угловое ускорение тела:
ω= 4.400000000
ε= 3.2
Абсолютная скорость точки:
Vабс,x = 0.797868516
Vабс,y = 87.26512332
Vабс = 87.26877071
Абсолютное ускорение точки:
Wабс,x = −750.8861962
Wабс,y = 80.02458420
Wабс = 755.1384070
108
6.3Применение интегралов для функций многих переменных
Пример № 1
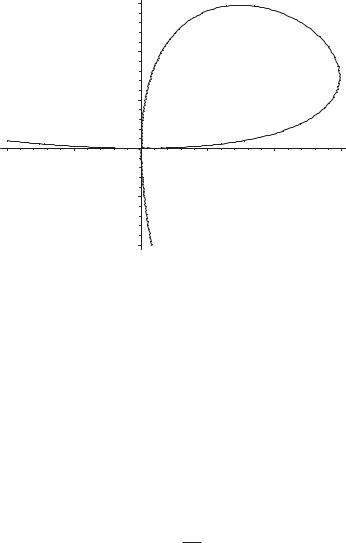
Найти площадь петли кривой (x + y)3 = a xy .
Решение
>restart;
>with(student):
with(plots):
>L := (x+y)^3=a*x*y: a := 10:
implicitplot(L, x=-1..a, y=-1..a, numpoints=100000); a := ’a’:
|
|
1.5 |
|
|
|
|
1 |
|
|
|
|
y |
|
|
|
|
0.5 |
|
|
–1 |
–0.5 |
0.5 |
1 |
1.5 |
|
|
|
x |
|
|
|
–0.5 |
|
|
|
|
–1 |
|
|
>tr := x=rho*cos(phi), y=rho*sin(phi):
eq_rho := collect(subs(tr, L) / rho^2, rho): eq_rho;
rho[0] := factor(solve(eq_rho, rho));
cos φ + ρ sin φ 3ρ = a cos φ sin φ |
||
|
|
|
ρ0 := |
a cos φ sin φ |
|
cos φ + ρ sin φ 3 |
|
|
>with(Student[MultivariateCalculus]):
>S := MultiInt(1, rho=0..rho[0], phi=0..Pi/2,
coordinates=polar[rho,phi]):
’S’ = S;
S =
a2
60
109
Пример № 2
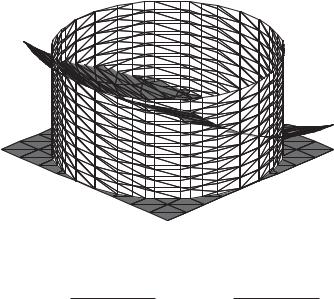
Найти площадь поверхности x2 + y2 = 2ax , если 0 az x2 + y2 , a > 0 .
Решение
>restart;
>with(plots):
>P := x^2+y^2=2*a*x: D := a*z=x^2+y^2:
>a := 1:
F := implicitplot3d(P, x=0..2*a, y=-a..a, z=0..4*a,
color=white):
G := implicitplot3d(z=0, x=0..2*a, y=-a..a, z=0..4*a, color=red):
H := implicitplot3d(D, x=0..2*a, y=-a..a, z=0..4*a, color=red):
display({F, G, H}); a := ’a’:
>Y := solve(P, y): y=Y[1], y=Y[2];
y = −x2 + 2ax, y = − −x2 + 2ax
>Z := solve(subs(y=Y[1], C), z): z=Z;
f := sqrt(1+diff(Y[1],x)^2+diff(Y[1],z)^2):
z = 2x
110