

Математика, теория+расчетные 1 семестр
.pdf
|
x2 |
|
y 2 |
|
Каноническое уравнением гиперболы имеет вид |
|
− |
|
=1, гдес2– |
a 2 |
b2 |
|||
а2=b2 .
Свойства гиперболы
1.Гипербола является симметричной кривой относительно осей коорди- нат. Ось симметрии, проходящая через фокусы, называется фокальной осью, а точка пересечения осей симметрии – центром гиперболы.
2.Гипербола пересекает ось Oх в точках А1(-а,0) и А2(а,0).
3.Отрезок А1А2 называется действительной осью гиперболы (фокальная ось).
4.Прямые у=(b/a)x и y=(–b/a)x, содержащие диагонали прямоугольника с вершинами N1(–a,–b), N2(–a,b), N3(a,b), N4(a,–b), являются асимптотами
гиперболы.
5.Величина ε=с/а называется эксцентриситетом гиперболы. Так как для гиперболы справедливо неравенство с>а , то эксцентриситет гиперболы удовлетворяет условию ε>1.
Геометрический смыл эксцентриситета: большему значению ε соот- ветствует гипербола более сжатая вдоль фокальной оси.
Парабола Определение. Параболой (рис. 8)называется геометрическое место
точек плоскости, равноудаленных от данной точки F, называемой фоку- сом, и данной прямой l, называемой директрисой.
44
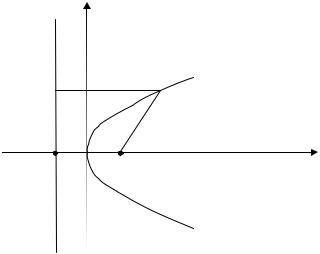
Y
d M(x,y) k 
-p/2 0 |
F(p/2,0) |
X |
l
Рис. 8
Каноническое уравнение параболы имеет вид у2=2рх, где р – рас- стояние от фокуса до директрисы.
Свойства параболы.
1.Парабола не имеет центра симметрии.
2.Парабола симметрична относительно оси 0х.
3.Точка (0,0) пересечения параболы с осями координат называется вершиной параболы.
4.За эксцентриситет параболы принимают отношение расстояний от произвольной точки М параболы до директрисы – d и до фокуса – r, то
есть ε=d/r = 1, т.к. r = d.
Замечание. Эллипс и гипербола имеют центр симметрии и поэто- му называются центральными, а парабола не имеет центра симметрии − нецентральная кривая.
Следует отметить, что указанные кривые могут быть получены как сечения прямой круговой конической поверхности плоскостью (рис. 9):
1.Если секущая плоскость α перпендикулярна оси АВ, то в сечении получим окружность.
2.Если секущая плоскость α составляет с осью АВ угол γ (β;π/2), то в сечении получим эллипс.
3.Если секущая плоскость α параллельна оси АВ и не проходит через вершину O , то в сечении получим гиперболу.
45
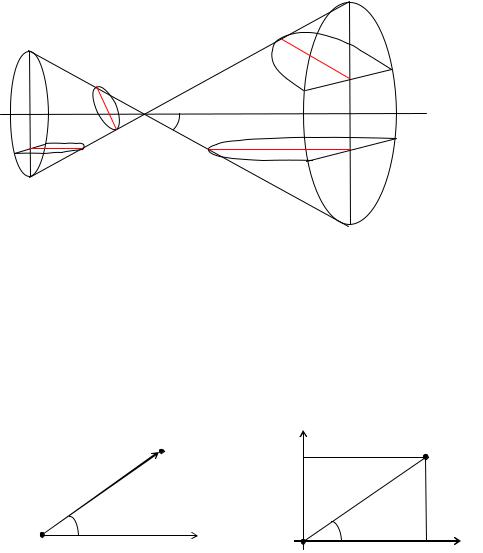
4.Если секущая плоскость α параллельная образующей CD и не про-
|
C |
парабола |
|
|
|
||
|
эллипс |
|
|
A |
O |
B |
|
β |
|||
|
|
||
|
гипербола |
|
D
окружность
Рис. 9
ходит через вершину 0 , то в сечении получим параболу. 4. Полярная система координат
Для введения полярной системы координат на плоскости возьмем точку О плоскости и назовем ее полюсом. Из этой точки О проведем луч Ор, называемый полярной осью.
M(ρ,ϕ) |
Y |
M(ρ,ϕ) |
|
|
ρ |
y |
ρ |
|
|
|
|
||
|
ϕ |
|
ϕ |
|
O |
p |
|
|
|
O |
x |
X |
||
|
a) |
|
б) |
|
Рис. 10
Для произвольной точки М плоскости (рис. 10, а) однозначно опре- деляется длина отрезка ОМ, называемого полярным радиусом точки М, и которая обозначается символом ρ (заметим, что ρ= |ОМ| ≥ 0). Угол ϕ = МOр называется полярным углом точки М. Полярный угол рассматри- вают в пределах одного оборота и, как в тригонометрии, поворот против часовой стрелки считают положительным, а по часовой стрелке – отрица- тельным.
46

Если точка М имеет полярный радиус ρ и полярный угол ϕ, то это записывается в виде М(ρ,ϕ).
Определение. Упорядоченная пара действительных чисел
(ρ,ϕ) называется полярными координатами точки М. Полярной системой координат на плоскости называется полюс и полярный луч вместе с по- нятием полярных координат любой точки плоскости.
Замечание. Полярные координаты однозначно определяют поло- жение любой точки на плоскости, за единственным исключением – само- го полюса. Чтобы восстановить однозначность для любой точки плоскости полагают полярные координаты полюса равными нулю: О(0,0).
Определение. Говорят, что прямоугольная декартова система ко- ординат на плоскости Оху стандартным образом совмещена с полярной системой координат этой же плоскости, если полюс полярной системы ко- ординат совпадает с началом координат ПДСК, а полярный луч совпа- дает с положительным направлением оси абсцисс (рис. 10, б).
Теорема. Пусть прямоугольная декартова система координат на плоскости Оху стандартным образом совмещена с полярной системой ко- ординат на этой же плоскости. Тогда декартовые координаты (х,у) любой точки плоскости связаны с её полярными координатами (ρ, ϕ ) следую-
щими соотношениями: |
или |
|
|
|
х = ρ cos ϕ |
ρ = x2 + y2 |
|||
y = ρ sin ϕ |
|
ϕ = arctg |
y |
|
|
|
|||
|
|
x |
||
|
|
|
||
Приведем некоторые уравнения в полярной системе координат, описывающие известные геометрические места плоскости:
ρ = R0 |
уравнение окружности радиуса R0 c центром в полю- |
|
се; |
ρ sin ϕ = a уравнение прямой линии, отстоящей от поляры на
|
|
расстояние равное а ; |
ϕ = |
π |
уравнение биссектрисы первого и третьего коорди- |
4 |
натных углов. |
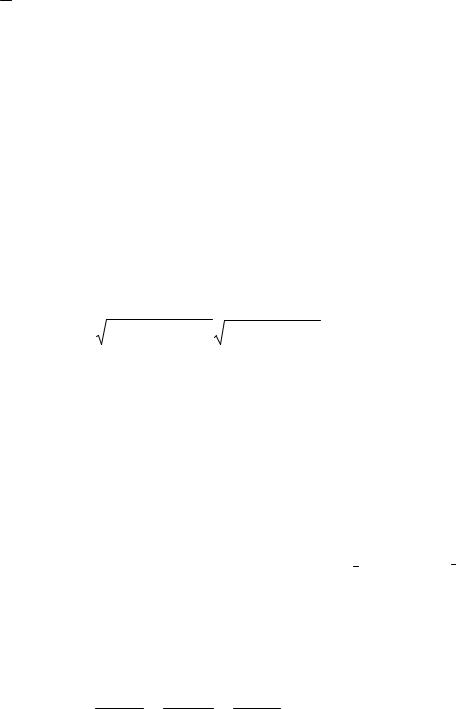
Пример. Построить кривую ρ = a cos 2ϕ. Решение.
47

Будем давать значения полярному углу ϕ от ϕ=0 до ϕ=2π через про- межуток α = 8π и вычислим соответствующие значения ρ. Найденные
значения поместим в табл.1. Примем произвольный отрезок за единицу масштаба, которой будем пользоваться при построении ρ. По значениям ρ и ϕ из таблицы построим точки, соответствующие каждой паре чисел ρ и ϕ, и соединим их плавной кривой.
Таблица 1
ϕ |
2ϕ |
ρ = a cos 2ϕ |
|
|
ϕ |
2ϕ |
ρ = a cos 2ϕ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
a |
|
|
9π⁄8 |
9π⁄4 |
a√2⁄2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
π⁄8 |
π⁄4 |
a√2⁄2 |
|
|
5π⁄4 |
5π⁄2 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
π⁄4 |
π⁄2 |
0 |
|
|
11π⁄8 |
11π⁄4 |
-a√2⁄2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3π⁄8 |
3π⁄4 |
-a√2⁄2 |
|
|
3π⁄2 |
3π |
- a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
π⁄2 |
π |
- a |
|
|
13π⁄8 |
13π⁄4 |
-a√2⁄2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5π⁄8 |
5π⁄4 |
-a√2⁄2 |
|
|
7π⁄4 |
7π⁄2 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3π⁄4 |
3π⁄2 |
0 |
|
|
15π⁄8 |
15π⁄4 |
a√2⁄2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7π⁄8 |
7π⁄4 |
a√2⁄2 |
|
|
2π |
4π |
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
π |
2π |
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Построение кривой показано рисунке. Полученная кривая называ- ется четырехлепестковой розой (рис. 11).
48
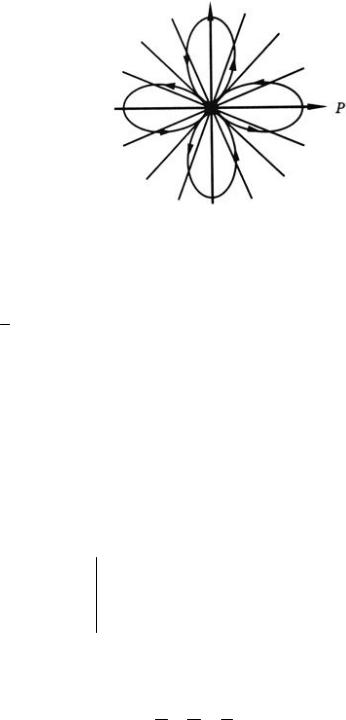
Рис. 11
5. Плоскость в пространстве. Уравнения плоскости
Теорема. Уравнение плоскости П, проходящей через заданную точку M 0 (x0 , y0 , z0 ) Π и имеющей заданный вектор нормали
n = ( A, B,C) (≠ 0) , имеет вид
A(x − x0 ) + B( y − y0 ) + C(z − z0 ) = 0, A2 + B2 + C 2 ≠ 0 .
Преобразуем уравнение Ax + By +Cz −( Ax + By +Cz ) = 0 .
140 4204430
D
Тогда Ax + By + Cz + D = 0 – общее уравнение плоскости.
Теорема. Уравнением плоскости, проходящей через три точки
M1 (x1, y1, z1 ) , M 2 (x2 , y2 , z2 ) , M 3 (x3 , y3 , z3 ) , не лежащие на одной прямой, имеет вид
x − x1 |
y − y1 |
z − z1 |
|
= 0 . |
|
||||
x2 − x1 |
y2 − y1 |
z2 − z1 |
|
|
x3 − x1 |
y3 − y1 |
z3 − z1 |
|
|
По аналогии с прямой на плоскости, уравнение плоскости, пересе- кающей координатные оси в точках (a,0,0) , (0,b,0) и (0,0,c) , имеет вид
ax + by + cz =1
и называется уравнением плоскости «в отрезках».
49
Обозначим через p расстояние от начала координат до плоскости Π , а через n0 = (cosα,cosβ,cos γ) единичный вектор нормали к этой плос-
кости.
Теорема. Точка M (x, y, z) лежит на плоскости Π тогда и только тогда, когда координаты этой точки удовлетворяют уравнению
x cos α + y cosβ + z cos γ − p = 0 .
Последнее уравнение называется нормальным (нормированным) уравнением плоскости.
Теорема. Пусть уравнения А1х+В1у+С1z+D1=0 и А2х+В2у+С2z+D2=0 определяют две плоскости α и β. Тогда:
1) угол ϕ между плоскостями α и β (линейный угол ϕ двугранного угла,
образованного этими плоскостями, если ϕ≤ |
π ) определяется с помощью |
|||||||||||||
формулы |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
| А1 А2 + В1 В2 + С1С2 | |
|
|
||||||
cos ϕ = |
|
|
|
|
; |
|||||||||
|
A 2 |
+ В 2 |
+ С 2 |
А2 + В2 |
+ С2 |
|||||||||
|
|
|
|
|
|
1 |
|
1 |
1 |
2 |
2 |
2 |
|
|
2) условие перпендикулярности плоскостей α и β : |
||||||||||||||
|
|
|
А1А2+В1В2+С1С2=0; |
и β: |
||||||||||
3) условие параллельности плоскостей α |
||||||||||||||
|
А1 |
= |
В1 |
= |
С1 |
. |
|
|
|
|
|
|||
|
А |
В |
2 |
С |
2 |
|
|
|
|
|
||||
2 |
|
|
|
|
|
|
|
|
|
|
||||
6. Прямая в пространстве
Теорема. Уравнения прямой в пространстве L, проходящей через точку M 0 (x0 , y0 , z0 ) L с направляющим вектором l = (m, n, p) , l ≠ 0 , име-
ют вид |
|
|
|
|
|
|
|
|
|
x − x0 |
= |
y − y0 |
= |
z − z0 |
, m2 |
+ n2 |
+ p2 ≠ 0 . |
|
m |
n |
p |
|||||
|
|
|
|
|
|
|||
Уравнения называются каноническими уравнениями прямой.
Если обозначить x −mx0 = y −ny0 = z −pz0 = t , то получим
50
x = x0 + mt,
y = y0 + nt, t R – параметрические уравнения прямой.
z = z0 + pt,
Теорема. Пусть заданы две плоскости Π1 : A1x + B1 y + C1z + D1 = 0 ,
Π2 : A2 x + B2 y + C2 z + D2 = 0 . Если нормальные векторы n1 = ( A1, B1,C1 ) и n2 = ( A2 , B2 ,C2 ) неколлинеарны, тогда система уравнений
A1x + B1 y + C1z + D1 = 0,A2 x + B2 y + C2 z + D2 = 0
определяет прямую, по которой они пересекаются.
7. Взаимное расположение прямой и плоскости Теорема. Пусть задана плоскость α: Ax + By + Cz + D = 0 и прямая
линия l, каноническое уравнение которой имеет вид х−mх0 = y −n y0 = z −pz0 .
Тогда:
1) угол ϕ между прямой l и плоскостью α (это угол, образованный прямой l и ее проекцией l ′ на эту плоскость) определяется с помощью формулы
sin ϕ= |
| Am + Bn +Cp | |
; |
A2 + B2 +C2 m2 + n2 + p2 |
2)условие параллельности прямой l и плоскости α: Am + Bn +Cp = 0 ;
3)условие перпендикулярности прямой l и плоскости α имеет вид
mA = Bn = Cp .
8. Поверхности второго порядка
Понятие поверхности.
Поверхностью второго порядка будем называть поверхность, опреде- ляемую в декартовой системе координат уравнением второго порядка
а11х2+2а12ху+2а13хz+2a14x+a22y2+2a23yz+2a24y+a33z2+2a34z+a44=0.
51

Все поверхности второго порядка разделяются на пять классов:
1.Эллипсоиды.
2.Гиперболоиды.
3.Параболоиды.
4.Цилиндры.
5.Конусы.
Следует отметить, что уравнения поверхностей, приведенные далее, записаны в специально выбранных декартовых координатах, которые называются каноническими.
Уравнения некоторых поверхностей.
1. Эллипсоид
x2 |
+ |
y 2 |
+ |
z 2 |
=1 |
|
a 2 |
b2 |
c2 |
||||
|
|
. |
Замечание. Если a=b=c=R, то в этом случае эллипсоид называется сферой радиуса R с центром в начале координат.
2. Однополостный гиперболоид
x2 |
+ |
y 2 |
− |
z2 |
=1 |
|
a2 |
b2 |
c2 |
||||
|
|
. |
3. Двуполостный гиперболоид
x2 |
+ |
y 2 |
− |
z2 |
= −1 |
|
a 2 |
b2 |
c2 |
||||
|
|
. |
4. Эллиптический параболоид
х2 |
y 2 |
p+ q = 2z , pq>0.
5.Гиперболический параболоид
52
|
х2 |
|
− |
y 2 |
|
= 2z , pq>0. |
|
|
|
|
|||
|
p |
|
q |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||
6. Конус |
|
|
|
|
|
|
|||||||
|
x 2 |
|
+ |
|
y 2 |
|
− |
z 2 |
= 0 |
|
|
|
|
|
a 2 |
|
|
b2 |
|
c2 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|||
7. Цилиндры: |
|
|
|
|
|||||||||
|
x2 |
+ |
|
y 2 |
|
= 1 – эллиптический, |
x2 |
− |
y 2 |
= 1 – гиперболический, у2=2рх – |
|||
|
a 2 |
|
b2 |
|
|
||||||||
|
|
|
a 2 |
b2 |
|||||||||
|
|
|
|
|
|
|
|
|
|
||||
параболический.
При исследовании поверхностей второго порядка важным является построение некоторых сечений: х=Const, y=Const, z=Const. По виду этих сечений возможно установить свойства указанных поверхностей.
9. Элементарная теория линейных операторов
Линейный оператор и его матрица.
Определение. Если каждому элементу x из линейного простран- ства L ставится в соответствие единственный элемент y из линейного
пространства M, то говорят, что задан оператор, действующий из про- странства L в пространство M. Результат действия оператора A на эле- мент x обозначают y = A(x) .
Если элементы x и y связаны соотношением y = A(x) , то y назы-
вают образом x ; а x – прообразом y .
Определение. Множество элементов пространства L, для которых определено действие оператора A, называют областью определения опе- ратора A и обозначают D(A).
Определение. Множество элементов пространства M, которые яв- ляются образами элементов из области определения D(A) оператора A, называют образом оператора A и обозначают Im(A). Если y = A(x) , то
x D(A), y Im(A) .
53