

4. Общий способ определения коэф-ов и свободных членов системы канонич. Ур-ий метода перемещений.
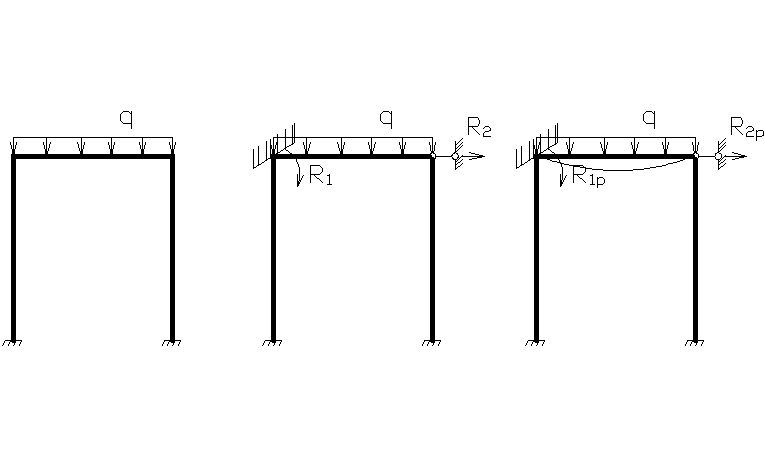
Основная система метода перемещений получается путем введения дополнительных связей и появлению реактивных моментов во введенных заделках и реактивных сил в дополнительных стержнях. Эти дополн реак силы и моменты можно обратить в 0, если заделку повернуть на углы, равные действит углам поворота узлов рамы и сместить узлы рамы, так чтобы лин перемещ так же были равны действит смещ. После этого деформ основ сист и усилия в ней будут равны деформ и усилиям зад сист. Отрицание реак М и усилий во введен заделках и стержнях основ сист лежит в основе уравн метода перемещ. Уравнения метода перемещ – уравн равновесия.
![]()
![]()
![]()
Определение коэф при неизвестных: 2 способа : 1) статический 2) общий (основанный на применении теорема о взаимности работ)
Выбор основной системы метода перемещ.
Построение эпюр изгиб моментов в основ системе метода перемещ от единичн смещений и от внеш нагрузки.
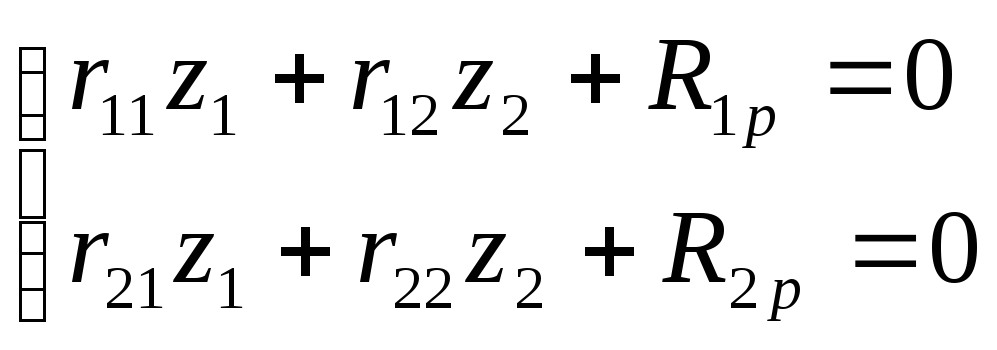
Поскольку коэф свобод членов канон ур-ний явл реакциями связей основ системы, то они опред из уравн-ий равновесия.
Коэф представ реактив момент во введ заделках опредл из уравн равновес вырезанного узла. Коэф представл реактив усилия в дополн стержнях опред из условия равновес всех факторов действ на отсечен часть рамы
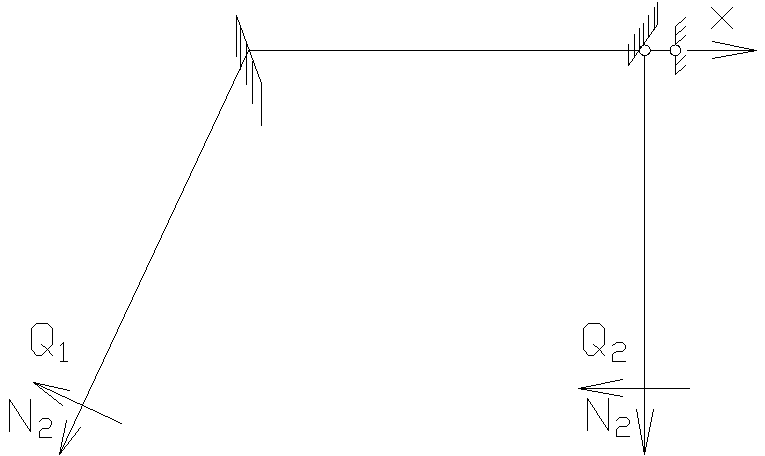
Общий способ применим к любой системе и позвол путем перемнож эпюрполучить формулы для реакций в общем виде.
10 Динамический расчет системы
Этот расчет можно производить используя как МС так и МП
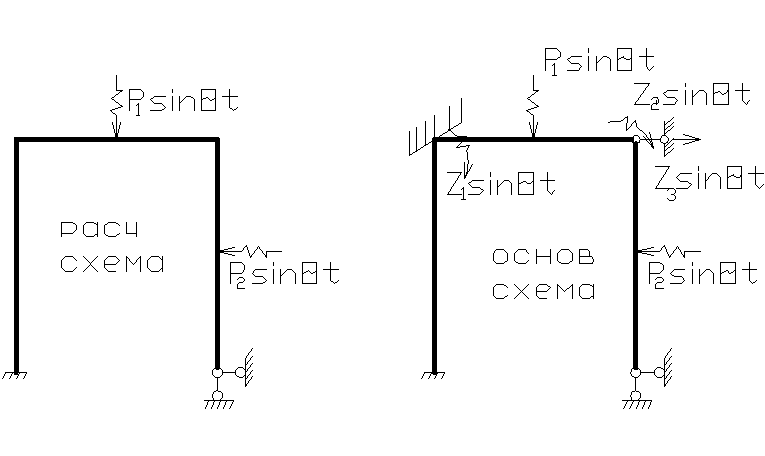
Основ сист задается путем наложения связей с одноврем динам неизвестн перемещ.
![]()
Канонич уравн-я
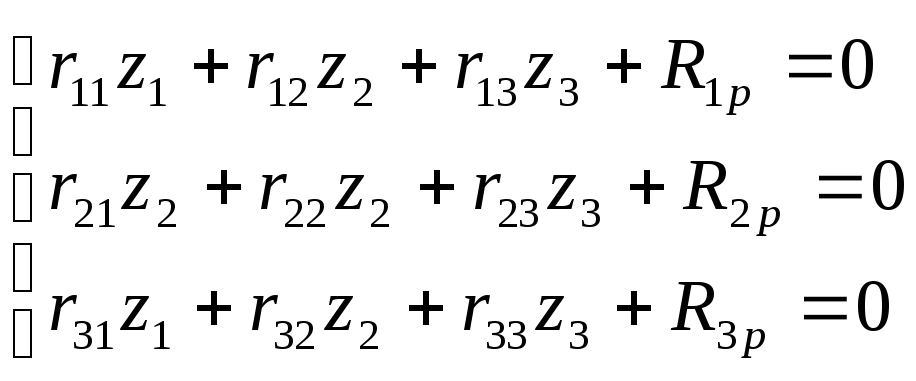
Неизвестные z1,
z2,
z3
– амплитуды вибрац перемещ. Коэф
неизвестн-х – это амплитудные реакции
связей от вибрационной нагрузки(т е
при их определении учит силы инерции
сосредоточенных или равномернораспред
масс, стержней рамы). Для решения таких
задач использ спец значения таких
функций зависят от аргумента u
![]()
Где l
– длина стержня,
![]() -
погонная масса стержня,EI-
жесткость стержня,
-
погонная масса стержня,EI-
жесткость стержня,
![]() -
пол. жест. стер.
- частота вынужденных колебаний=частоте
возмущ сил. При рассм собств колеб в
формулу 1 вместо
(частота собственных колеб) В канон
уравн свобод члены равны 0. Для получения
Ур-я частот заставляют, прирав к 0 и
раскрыв-ся определитель, сост-ий из
клэф-ов при неизвестных канон уравн-ий.
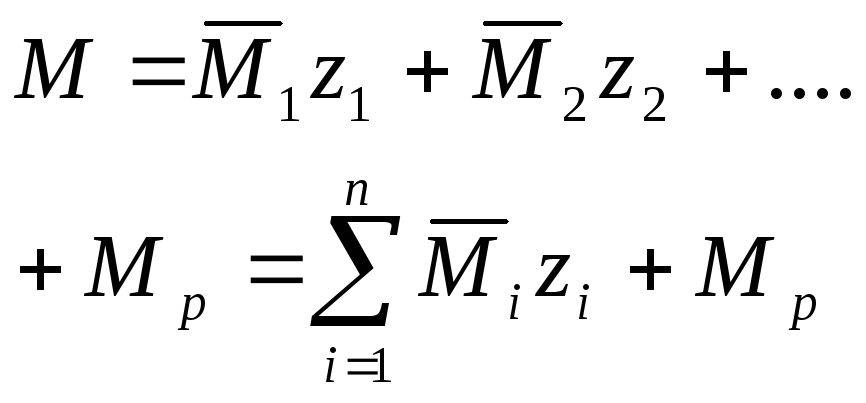
Окончат эпюра строиться по формуле
-
пол. жест. стер.
- частота вынужденных колебаний=частоте
возмущ сил. При рассм собств колеб в
формулу 1 вместо
(частота собственных колеб) В канон
уравн свобод члены равны 0. Для получения
Ур-я частот заставляют, прирав к 0 и
раскрыв-ся определитель, сост-ий из
клэф-ов при неизвестных канон уравн-ий.
Окончат эпюра строиться по формуле
![]()
Расчет по МС:
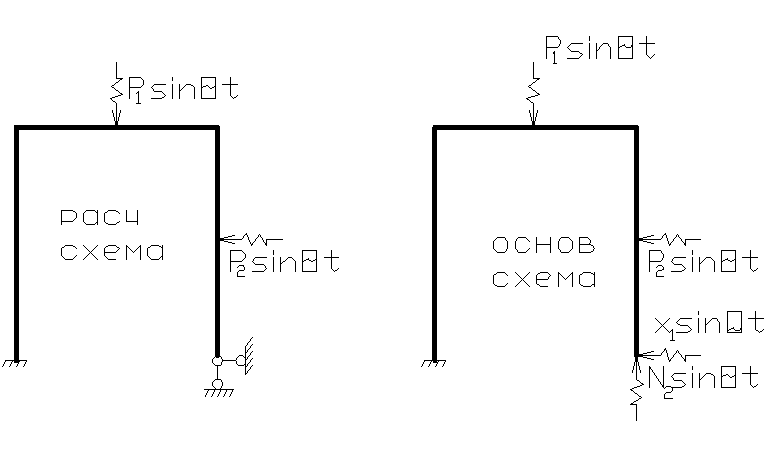
На сист действ вибрац гармонич нагрузки, =const и наход в одной фазе. Заменим отброш связи неизвестн динамич реакциями, к-ые так же будут изменятся по тому же гармон закону к-му следует начальн нагр.
Канонич ур-ие, сокращаем sint
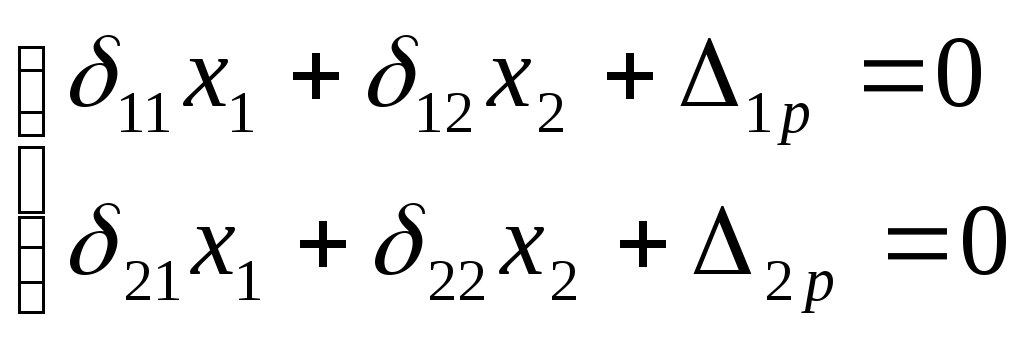
Где
![]() амплитудные значения перемещений по
направл неизвест от динам силы.
амплитудные значения перемещений по
направл неизвест от динам силы.![]()
![]() -
амплитудные перемещпо направл неизвест
сил от динам нагрузки. Коэф при неизвест
и свобод члены канон ур опред по формуле
-
амплитудные перемещпо направл неизвест
сил от динам нагрузки. Коэф при неизвест
и свобод члены канон ур опред по формуле
![]() где
где
![]() -
выражает момент от силы
-
выражает момент от силы![]() ,
,![]() -выраж
изгиб момент, от динам нагрузки с учетом
сил инерции, т к возник трудности с
опред Мизг
от динам нагрузки с учетом сил инерции,
то МС мало эффект для динам рсчета рам.
Для определ частот рсвобод колеб рам
свобод члены канон ур приним =0, а вместо
берется
неизвест частот свобод колеб. Определитель
из коэф системы прирав 0 и раскрывают.
Это последнее уравн трансцендентное
и сложное.Единств способ его нахожд –
подбор.
-выраж
изгиб момент, от динам нагрузки с учетом
сил инерции, т к возник трудности с
опред Мизг
от динам нагрузки с учетом сил инерции,
то МС мало эффект для динам рсчета рам.
Для определ частот рсвобод колеб рам
свобод члены канон ур приним =0, а вместо
берется
неизвест частот свобод колеб. Определитель
из коэф системы прирав 0 и раскрывают.
Это последнее уравн трансцендентное
и сложное.Единств способ его нахожд –
подбор.