

619_Sidel'nikov_G._M._Statisticheskaja_teorija_radiotekhnicheskikh_
.pdfзначение x1 , а в момент времени t2 принимает значение x2 |
и т.д. Соответству- |
ющая интегральная функция распределения имеет вид: |
|
F(x1t1; x2t2 ;...xktk ) или Fk (x,t) |
(2.1) |
Полное описание даёт многомерная функция распределения при k→ ∞. Однако на практике мы имеем дело с сигналами, ограниченными по спектру, тогда k T t , где t – интервал по Котельникову.
t , где t – интервал по Котельникову.
t |
1 |
|
|
2Fс и, следовательно, k– конечно. |
|||
Известно, что |
|||
Если ФПВ найти затруднительно или не нужно, то используются числовые характеристики:
—математическое ожидание
mx (t) x w1(x,t)dx - для непрерывных сигналов,
k
mx pi xi - для дискретных сигналов;
i 1
—дисперсия
|
|
|
|
|
|
|
|
|
|
|
|
Dx (t) x2 (t) (x mx (t))2 w1(x,t)dx [x mx (t)]2 |
; |
|
|||||||
|
|
|
|
|
|
|
|
|
||
— |
функция корреляции |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
Bx (t1 |
,t2 ) [x1 |
mx (t1)] [x2 mx (t2 )] w(x1t1, x2t2 )dx1dx2 |
|
||||||
|
|
|
|
|
|
|
|
|
|
(2.2) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
[x1 |
mx (t1)] [x2 |
mx (t2 )]. |
|
|
|
|
||||
|
|
rx t1,t2 |
|
|
Bx t1,t2 |
- нормированная корреляционная функция. |
||||
|
|
x t1 x t2 |
||||||||
|
|
|
|
|
|
|
||||
|
|
В качестве математических моделей случайных сигналов и помех в боль- |
||||||||
шинстве случаев используются гауссовские и марковские случайные процессы . Гауссовский процесс имеет одномерную функцию плотности вероятностей
вида [1,4]:
|
|
|
|
|
|
1 |
|
|
[ x mx (t )]2 |
|
|
|
|
|
|
|
|
|
|
2 |
|
||
|
|
|
|
w (x,t) |
|
|
|
|
e |
2 x (t ) |
(2.3) |
|
|
|
|
|
|
|
|
||||
|
|
|
|
1 |
|
2 x |
(t) |
|
|
||
|
|
|
|
|
|
|
|
||||
где |
m (t) m , |
2 |
(t) 2 |
|
|
|
|
|
|
||
x |
x |
x |
x для стационарных процессов. |
|
|||||||
Двумерная функция плотности вероятностей стационарного гауссовского процесса может быть записана в виде[5]:
11

|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
||
w2 |
(x,t) |
|
|
|
|
exp |
|
|
|
|
|
||||
2 2 |
1 r2 |
||||||
|
|
|
|
||||
|
|
x |
|
x |
|
|
|
1 |
|
|
(x1 mx ) |
2 |
2rx (x1 mx )(x2 mx ) (x2 mx ) |
2 |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
2 |
|
|
|
2 |
|
||
2(1 rx |
) |
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
Марковский случайный процесс (непрерывный или дискретный) используется для математического описания случайных процессов с памятью, причём состояние процесса в данный момент времени полностью определяется его состоянием в предшествующий момент времени. Следовательно, его математическим описанием может быть одномерная плотность вероятностей ( например, w1(x,t) ) и условная плотность вероятностей w1(x,t / x0 ,t0 ) (вероятности перехо-
да для дискретного процесса p(x,t / x0 ,t0 ) ), где x0 (t0 ) – состояние процесса в предшествующий момент времени t0 .
Дискретные марковские процессы или дискретные марковские последовательности обычно называются цепями Маркова.
Простая цепь Маркова образует пуассоновский процесс, расстояние между событиями которого определяются показательным законом вида:
w (t) e t , 0; |
(2.4) |
1 |
|
где λ – интенсивность потока событий, а появление k событий на интервале времени T определяется законом Пуассона
p (T ) e T |
( T )k |
|
|
(2.5) |
|
|
||
k |
k! |
|
|
||
Вероятностная модель случайного процесса x(t) позволяет определить вероятности любых событий, связанных с этим процессом (рисунок 2.1).
x(t)
h
t
t1 |
t2 |
ti |
tn |
Рис. 2.1. Набор реализаций случайного процесса, образующих ансамбль случайного процесса
Например:
вероятность события A x t1 T h равна
12

|
|
|
|
|
|
|
P A w1 x,t1 T dx ; |
|
|
|
|
|
|
h |
|
|
|
|
|
|
|
n |
|
t |
|
|
|
вероятность события |
B |
x |
равна |
|||
|
i 1 |
|
i |
|
|
|
|
|
|
|
|
|
|
P B ... w x1...xn ;t1...tn dx1,dx2...dxn ; |
|
|||||
n |
|
t h}, |
|
|
||
вероятность события |
C P{x |
t1 |
t t1 T равна |
|||
P C F x1 h, x2 h,..., xn h;t0 ,t1,...,tn |
|
|||||
2.1.2. Помехи и их классификация
Помехи– это стороннее воздействие на сигнал, препятствующее правильному приёму сигнала (правильному решению о значении измеряемого параметра сигнала) [1,3,5].
По источникам происхождения помехи разделяются.
1.Космические шумы, представляющие собой радиоизлучения звёзд и галактик (в большей степени проявляются на УКВ).
2.Атмосферные помехи – помехи электрического происхождения при атмосферных явлениях.
3.Промышленные помехи – помехи связанные с промышленными, электрическими установками.
4.Внутренние шумы аппаратуры, источником которых являются электрические компоненты передающей и приёмной частей системы передачи информации.
5.Шумы нелинейных переходов в линии передачи и элементах приёмника.
6.Шумы соседних каналов и радиостанций из-за слабой избирательности входных цепей приёмника.
7.Преднамеренные шумы от других радиостанций.
8.Эхо-сигналы и сигналы, поступающие на вход приёмника в результате отражений и рассеивания от различных объектов в процессе распространения в линии передачи (замирания, многолучёвость и пр.).
По характеру воздействия на сигнал помехи разделяются.
1.Аддитивная помеха суммируется с сигналом
x(t) S(t) n(t), |
(2.6) |
где n(t) – помеха; |
|
2. Мультипликативная помеха умножатся на сигнал |
|
x(t) (t) S(t), |
(2.7) |
где μ(t) – помеха.
13

В общем случае на сигнал может воздействовать множество как аддитивных, так и мультипликативных помех. В результате сигнал на входе приёмника принимает вид:
n |
|
x(t) [ i S(t i ) ni (t)] |
(2.8) |
i 1
Аддитивные помехи по статистической структуре разделяются на:
1.флуктуационные;
2.импульсные;
3.сосредоточенные.
1. Флуктуационные – это такие помехи, при которых расстояние между отдельными импульсами помех много меньше длительности переходных процессов в канале. Поэтому флюктуационная помеха в любой момент времени представляет собой сумму реакций канала на большое число предшествующих импульсов помех и в соответствии с предельной теоремой теории вероятностей имеет вид гауссовского шума, одномерная функция плотности вероятностей которого имеет вид
|
1 |
|
|
n2 |
|
|||
|
|
2 |
|
|||||
|
|
|
|
|||||
w(n) |
|
|
|
|
|
e 2 n |
, |
|
|
|
|
|
|
||||
|
|
2 |
n |
|
|
|||
где 2 |
N |
0 |
F , N0 |
- односторонняя спектральная плотность мощности |
||||
n |
|
|
k |
|
|
|||
белого шума.
Плотность распределения вероятностей огибащей En флуктуационной помехи определяется релеевским законом:
|
|
|
E2 |
|
|
En |
n |
|
|
w(E ) |
e |
2 n2 |
(2.9) |
|
2 |
|
|||
n |
|
|
|
|
|
n |
|
|
|
2. Импульсные помехи отличаются от флуктуационных тем, что расстояние между импульсами помех больше длительности переходных процессов в канале связи.
Форма eu (t) соответствует g(t) – импульсная характеристика канала. Спектральная плотность импульсных помех практически равномерна в по-
лосе частот канала. При этом уровень спектральной плотности G является случайной величиной, функция плотности вероятностей которой обычно имеет вид показательной функции:
w(G) e G , 0. |
(2.10) |
Сосредоточенными помехи называются потому, что ширина их спектра много уже полосы пропускания канала.
Мультипликативные помехи характеризуются замираниями, то есть уменьшением амплитуды принимаемого сигнала. Изменение амплитуды сигнала может носить различный характер от степени рассеяния энергии сигнала по
14

времени и частоте. Рассеяние энергии сигнала по частоте связано с движением в пространстве приемника, а по времени – с многолучевым распространением.
Таким образом, при рассеянии энергии принимаемого сигнала по времени или по частоте замирания будут селективными. При рассеянии энергии в среде распространения замирания называются гладкими. При гладких замираниях спектр сигнала не претерпевает изменений, то есть он характеризуется сильной корреляцией частотных составляющих сигнала. При селективных замираниях, корреляция слабая.
Замирания в общем виде описываются передаточной функцией K(t, f). Учитывая, что коэффициент передачи величина случайная, то для различных условий распространения она характеризуется различными законами распределения вероятностей. Как правило, достаточно рассматривать два закона, распределение Релея и Райса. Если при многолучевом распространении, суммарный сигнал образуется в результате сложения большого числа слабо коррелированных величин с ограниченными дисперсиями, то одномерное распределение вероятностей │k│ является рэлеевским:
|
|
|
2 |
|
|
W(k) |
= |
|
exp( − |
|
) , k ≥ 0 |
2 |
2 2 |
||||
W(k) |
= 0, |
|
|
k< 0 |
|
Во многих каналах замирания отличаются от рэлеевских. Иногда в одном из подлучей коэффициент передачи ki значительно больше, чем в других, и можно считать, что помимо диффузно отраженных подлучей в место приема приходит и регулярный (незамирающий) луч. В этом случае коэффициент подчиняется обобщенному распределению Рэлея-Райса:
W(k) = 2 exp( − 22+2 2 ) Io( 2) ,
где 2 – мощность флуктуирующей составлящей сигнала, а 2 – мощность регулярной составляющийй.
2.2.Методы цифровой модуляции сигналов.
Модулятор является последним элементом передающего тракта и, строго говоря, не выполняет никаких операций собственно цифровой обработки сигналов. Его задача состоит в переносе информации цифрового сигнала с выхода кодера канала на несущую частоту, т.е. в модуляции высокочастотной несущей низкочастотным цифровым видеосигналом. Модулированный высокочастотный сигнал с выхода модулятора через антенный коммутатор и излучается в
15
эфир, чтобы затем быть принятым антенной станции-получателя информации. Соответственно демодулятор – первый элемент приемного тракта, и его задача заключается в выделении из принятого из принятого модулированного радиосигнала информационного видеосигнала, который подвергается цифровой обработке в последующей части приемного тракта.
Как известно, существуют три основных вида модуляции: это амплитудная модуляция – АМ (английский термин AmplitudeModulation – AM) , частотная модуляция – ЧМ (Frequency Modulation – FM) и фазовая модуляция – ФМ (Phase Modulation – PM). В цифровых системах связи применяются квадратурная фазовая манипуляция (Quadrature Phase Shift Keying – QPSK), минимальная манипуляция (Minimum Shift Keying – MSK), квадратурная амплитудная моду-
ляция (Quadrature Amplitude Modulation – QAM). Переход от простых видов модуляции к сложным связан с требованиями цифровых систем связи с высокой спектральной эффективностью, низким уровнем помех по смежным частотным каналам, низкой вероятностью ошибки, с эффективным использованием энергии источника питания, что особенно актуально для подвижной станции, простоту реализации.
Рассмотрим дифференциальную квадратурную фазовую манипуляцию со сдвигом π/4 (π/4 Differential Quadrature Phase Keying–π/4 DQPSK), используе-
мой в стандарте D-AMPS). По сути это – дискретная фазовая модуляция, с основным дискретом коммутации фазы π/2 ( как при обычной квадратурной фазовой манипуляции), но с дополнительным сдвигом по фазе на π/4 при переходе от символа к символу входной модулирующей последовательности импульсов. Слово дифференциальная в названии метода означает, что очередное изменение фазы отсчитывается не по отношению к фазе некоторого опорного сигнала, а по отношению к фазе предыдущего дискрета.
В этом методе все импульсы входной информационной последовательности bkмодулятора разбиваются на пары – на 2 битовые символы, и при переходе от символа к символу начальная фаза высокочастотного сигнала изменяется на величину Δφ, которая определяется битами символа в соответствии с алгоритмом, приведенным в таблице 2.1.
Таблица 2.1. Таблица истинности фазовой манипуляции метода π/4DQPSK
Нечетные |
Четные |
Изменение фазы |
(первые биты символа) |
(вторые биты символа) |
Δφk = Δφk(Xk,Yk) |
Xk |
Yk |
|
|
|
|
1 |
1 |
-3π/4 |
0 |
1 |
3π/4 |
0 |
0 |
π/4 |
1 |
0 |
-π/4 |
|
|
|
|
16 |
|
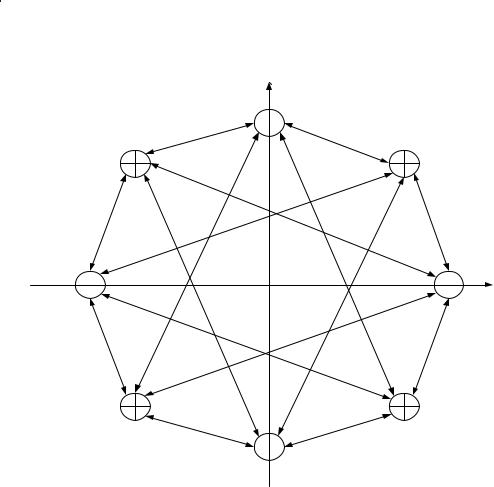
Фазовая диаграмма (созвездие сигналов), соответствующая этому методу, представлена на рис. 2.2. Кружочками обозначены дискретные значения, которые может принимать фаза несущей, отсчитываемая от некоторого начального значения. Стрелками указаны возможные переходы между разрешенными значениями фазы. Оси координат соответствуют синфазной ( Inphase – I) и квадратурной (Quadrature – Q) составляющей сигнала.
Q
I
Рис.2.2. Фазовая диаграмма (фазовое созвездие – phaseconstellaion), соответствующая методу π/4 DQPSK
Эта фазовая диаграмма, состоит из двух диаграмм обычной квадратурной фазовой модуляции, сдвинутых на π/4. При переходе от одного символа к другому, происходит изменение фазы от одного из состояний первой диаграммы к одному из состояний второй, а при переходе к следующему символу – возврат к предыдущей диаграмме, но не к прежнему фазовому состоянию. Результирующий выходной сигнал модулятора, без учета ограниченности полосы пропускания частотно-селективных элементов тракта, может быть представлен в виде:
S(t) = cos( ω0t + φk)
где ω0 – несущая частота, φk = φk-1 + Δφk – начальная фаза на интервале k– го символа.
17

Формирование амплитуд квадратурных составляющих очередного дискрета (символа) модулирующего сигнала происходит в соответствии с алгоритмом:
Ik= cosφk = cos (φk-1 + Δφk) = cosφk-1cosΔφk - sinφk-1sinΔφk =
Ik-1cos[Δφk ( Xk, Yk)] - Qk-1sin[Δφk ( Xk, Yk)] ,
Qk = sinφk =sin(φk-1 + Δφk) = sinφk-1cosΔφk - cosφk-1sinΔφk =
Qk-1cos[Δφk ( Xk, Yk)] - Ik-1sin[Δφk ( Xk, Yk)] ,
где приращение фазы Δφk определяется, как показано в таблице 2.1. Выполнение вычислений упрощается тем, что каждая из величин cosΔφk, sinΔφk, Ik, Qk может принимать значение в соответствии с Рис. 2.2 лишь одно из пяти дис-
кретных значений: 0, ±√2 /2, ±1. Сумма модулированных квадратурных составляющих дает окончательный выходной сигнал:
Ikcosω0t + Qksinω0t =cosφkcosω0t + sinφksinω0t = cos (ω0t + φk) = S(t)
В стандарте GSM используется гауссовская манипуляция с минимальным сдвигом (Gaussion Minimum Shift Keying – GMSK). Этот метод представляет собой частотную манипуляцию, при которой несущая частота дискретно – через интервалы времени, кратные периоду Т битовой модулирующей последовательности, принимает значения :
fн = f0 - F/4 fв = f0 + F/4
гдеf0 – центральная частота используемого частотного канала, а F = 1/F частота битовой последовательности.
Разнос частот Δf = fв - fн = F/2 - минимально возможный, при котором обеспечивается ортогональность сигналов с частотами fв и fн на интервале посылки сигнала Т; при этом за время Т между колебаниями частотfв и fн набегает разность фаз, равная π. Поскольку модулирующая частота в этом случае равна F/2, а девиация частоты F/4, индекс частотной модуляции m = (F/4)/(F/2) = 0,5.
При данном виде модуляции производится дополнительная фильтрация модулирующей битовой последовательности относительно узкополосным гауссовским фильтром; именно эта дополнительная фильтрация отличает метод
18
GMSK от метода MSK( Minimum Shift Keying - манипуляция с минимальным сдвигом).
Метод MSK иногда рассматривают как метод квадратурной фазовой манипуляции со смещением (DQPSK), но с заменой прямоугольных модулирующих импульсов длительностью 2Т полуволновыми отрезками синусоид или косинусоид.
В методе MSK входная последовательность битовых импульсов модулятора разбивается на две последовательности, состоящие соответственно из нечетных и четных импульсов, и модулированной сигнал (выходной сигнал модулятора) на протяжении n- го бита определяется выражением, зависящим от состояния текущегоn –го и предшествующего (n-1) - го бита:
S t cos t / 2T cos 0t sin t / 2T sin 0t cos 0t t / 2T , (2.11)
(n-1)T ≤ t ≤ nT
Здесь ω0 = 2πf0 - центральная частота канала, а выбор знаков «плюс» или «минус» перед соответствующими членами выражения определяется алгоритмом, приведенным в таблице 2.2.
Таблица 2.2. Закон модуляции метода MSK
Нечетный |
Четный |
Знак |
Знак |
|
Общий |
Знак |
Зна- |
бит |
бит |
первого |
второго |
знак вы- |
началь- |
чение |
|
|
|
слагаемого |
слагаемого |
ражения |
ной фа- |
несу- |
|
|
|
(2.11) |
зы |
су- |
|||
|
|
|
в |
первом |
|||
|
|
в первом |
|
щей |
|||
|
|
|
|
||||
|
|
представле- |
|
(2.11) |
|||
|
|
представле- |
|
ча- |
|||
|
|
нии (2.11) |
|
|
|||
|
|
|
|
стоты |
|||
|
|
нии (2.11) |
|
|
|||
|
|
|
|
|
|
||
|
|
(sin) |
|
(cos) |
|
|
|
|
|
(cos) |
|
(πt/2T) |
|
||
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
1 |
1 |
+ |
|
+ |
+ |
- |
fн |
0 |
1 |
+ |
|
- |
+ |
+ |
fв |
0 |
0 |
- |
|
- |
- |
- |
fн |
1 |
0 |
- |
|
+ |
- |
+ |
fв |
Из выражения (2.11) следует, что текущая фаза модулированного сигнала:
φ(t) = ω0t ± πt/2T,
19
т.е. набег фазы на интервале Т одного бита:
Δφ = ±π/2,
а мгновенная частота, как производная от фазы: ω(t) = d[φ(t)]/dt = ω0 ±π/2T = 2π(f0 ± F/4),
т.е. мгновенная частота принимает одно из двух значений -fв или fн постоянное на протяжение бита, что и указано в последнем столбце табл.2.2.
Таким образом, изменение знака начальной фазы во второй части выражения (2.11) означает переход от fн к fв или обратно. Изменение же общего знака выражения (2.11), эквивалентное изменению начальной фазы на π, позволяет сохранить непрерывность фазы при изменении частоты.
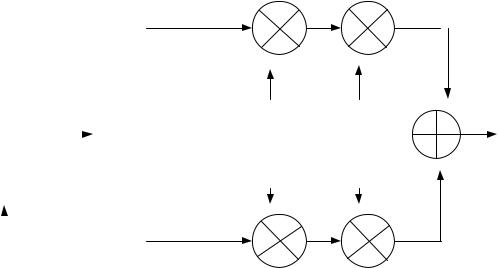
На Рис. 2.3. приведена блок-схема модулятора, построенная в соответствии с алгоритмом (2.11).
|
|
|
|
|
|
Гауссовский |
|
|
Коммутатор |
||
|
|
(разделение |
|||
Фильтр |
|
|
|||
|
|
последовательности |
|||
G |
|
|
|||
|
|
||||
|
|
на четные и |
|||
|
|
|
|
||
|
|
|
|
нечетные биты) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S(t)
sin(πt/2T) cosω0t
cos(πt/2T) sinω0t
Входная битовая последовательность
Рис.2.3. Блок – схема модулятора GMSK
Введение гауссовского фильтра приводит к сужению главного лепестка и снижению боковых лепестков спектра на выходе модулятора, чем обеспечивает допустимый уровень помех по смежным частотным каналам.
В заключении следует отметить, что методы модуляции π/4DQPSK и GMSK оказываются сопоставимы по помехоустойчивости, хотя первый из них обеспечивает более высокую эффективность использования полосы частот в расчете на один бит передаваемой информации.
20