

3.4.2. Последовательность графического интегрирования диаграммы скоростей
Перемещения ползуна lB получаем, интегрируя график скоростей, т.к. скорость является производной от пути по времени, т.е. υВ = d lB / dt.
Используя эту дифференциальную зависимость, определим перемещения ползуна в 8 положениях графическим интегрированием диаграммы скоростей (рис. 7):
диаграмму скоростей строим аналогично описанной выше последовательности с теми же масштабными коэффициентами: Кt = 0,0025 с/мм; Кυ = 0,075 (м/с) / мм;
заменяем кривую скоростей ступенчатым графиком. Для этого площадь каждого участка диаграммы заменяем равнозначной площадью прямоугольника;
продлеваем линию ступени каждого участка до оси ординат. Точки пересечения нумеруем по номеру участка;
в сторону отрицательных абсцисс получаемого графика lB (t) откладываем полюсное расстояние, которое принимаем Нl = 40 мм. Определяем масштабный коэффициент перемещений Кl = Кυ · Кt · Нl = = 0,075·0,0025 · 40 = 0,0075 м/мм. Это стандартный масштаб. Принимаем Кl = 0,0075 м/м;
соединяем точки ступеней участков, расположенные на оси ординат, с полюсом ml;
на участках, начиная с 1-го, последовательно проводим хорды параллельно лучам ml –1, ml –2, …, ml –8 , пристраивая каждую последующую в конец предыдущей;
полученный график в виде ломаной линии заменяем плавной кривой;
замеряем отрезки ординат на границах участков, умножаем на масштабный коэффициент Кl = 0,0075 м/мм.
Результаты вычислений представлены в табл. 6.
Т а б л и ц а 6
Величины перемещений lB ползуна В
Наименование параметров |
П о л о ж е н и е п о л з у н а |
|||||||
0 (8) |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
Отрезки lB, мм |
0 |
7,0 |
22,5 |
36,0 |
40,0 |
36,0 |
22,5 |
7,0 |
Перемещения lB, м |
0 |
0,052 |
0,169 |
0,270 |
0.300 |
0,270 |
0,169 |
0,017 |
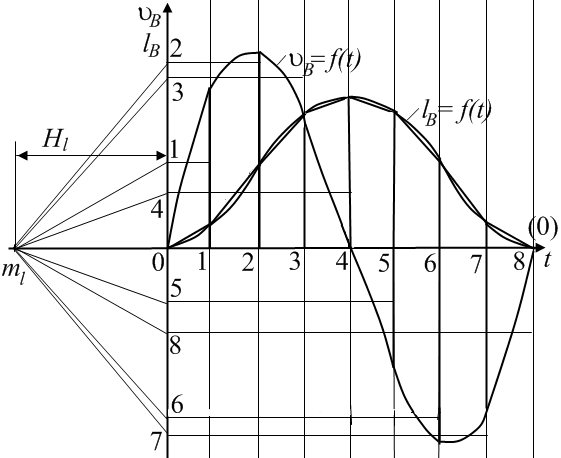
Рис. 7. Кинематические диаграммы скоростей и перемещений ползуна
(графическое интегрирование, метод равноценных площадей),
Кυ = 0,075(м/с)/мм; Кl = 0,0075 м/мм; Кt = 0,0025 с/мм
Силовой анализ
Силовой анализ для 1-го положения исследуемого механизма (рис. 3) проводим от группы шатун-ползун к начальному звену.
Вначале определяются силы, прикладываемые к звеньям механизма как внешние. Это силы тяжести, инерции, полезных сопротивлений.
Силы тяжести звеньев рассчитываются по формулам:
G1 = m1 g, Н; G2 = m2 g, Н; G3 = m3 g, Н,
где m1, m2, m3 – массы соответственно кривошипа, шатуна и ползуна, m1 =10,0 кг, m2 = 20 кг, m3 = 35 кг; g – ускорение свободного падения, g = 9,8 м/с2 .
G1 = 10,0 · 9,8 = 98 Н; G2 = 20 · 9,8 = 196 Н; G3 = 35 · 9,8 = 343 Н.
Направлены силы тяжести всегда вертикально вниз. Точки их приложения – центры масс звеньев: кривошипа S1, шатуна S2, ползуна S3.
Для определения сил инерции звеньев используем результаты кинематического анализа, в частности, план ускорений (рис. 5) и табл. 4. Расчёт производим для заданного 1-го положения механизма.
Система сил инерции для кривошипа (ε = 0) состоит только из главного вектора.
Величина главного вектора Ф1 определяется по формуле
Ф1 = т1 · аS1 = 10,0 · 84,4 = 844,0 Н,
где аS1 – ускорение центра масс кривошипа, принимаем из плана ускорений аS1 = 84,4 м/с2.
Направление вектора Ф1 противоположно направлению вектора аS1, а точка приложения – центр масс S1 .
Система сил инерции для шатуна, совершающего плоскопараллельное движение, состоит из главного вектора Ф2 и главного момента МФ2.
Величина главного вектора Ф2 определяется по формуле:
Ф2 = т2 · аS2 = 20,0 · 82,0 = 1640,0 Н,

где аS2 – ускорение центра масс шатуна, принимаем из плана ускорений аS2 = 82,0 м/с2;
Направление вектора Ф2 противоположно направлению вектора аS2, а точка приложения – центр масс S2.
Величина главного момента МФ2 определяются по формуле
МФ2= J2 · εВА = 1,5 · 96,0 = 144,0 Н· м,
где J2 – момент инерции масс шатуна относительно точки S2 , из задания J2 = 1,5 кгм2; εВА – угловое ускорение шатуна, принимается из плана ускорений (рис. 5, табл. 4).
Направление момента МФ2 противоположно направлению ε ВА, которое определяем по направлению вектора аВАτ, помещённого в точку В на схеме механизма. Направление момента МФ2 – по часовой стрелке.
Момент пары сил инерции МФ2 сдвигает главный вектор Ф2, приложенный в точке S2, параллельно самому себе на величину hФ.
Величина смещения hФ рассчитывается по формуле
hФ = МФ2 / Ф2 = 144,0 / 1640,0 = 0,09 м.
На плане звена это расстояние будет:
![]()
![]() =
hФ
/ Кl
=
0,09 / 0,0075 = 12 мм,
=
hФ
/ Кl
=
0,09 / 0,0075 = 12 мм,
где Кl – масштабный коэффициент схемы механизма, Kl= 0,0075 м/мм.
Направление
смещения
от точки S2
для кривошипно-ползунного механизма
всегда будет в сторону точки А.
Точку пересечения смещённой линии
действия ![]() с шатуном АВ
принимаем за проекцию точки приложения
силы инерции шатуна Т'.
с шатуном АВ
принимаем за проекцию точки приложения
силы инерции шатуна Т'.
Силы инерции для ползуна, совершающего поступательное движение, будут состоять только из главного вектора, величина которого определяется по формуле
Ф3 = т3 · аВ = 35,0 · 69,0 = 2415,0 Н,
где aB – ускорение центра масс ползуна (центр масс ползуна S3 совпадает с центром шарнира В), aB = 69,0 м/с2.
Н аправление
вектора Ф3
противоположно направлению вектора
аВ,
а точка приложения – центр шарнира В.
аправление
вектора Ф3
противоположно направлению вектора
аВ,
а точка приложения – центр шарнира В.
Силы полезного сопротивления для горизонтального поперечнопильного станка заданы в виде диаграммы (рис. 8).
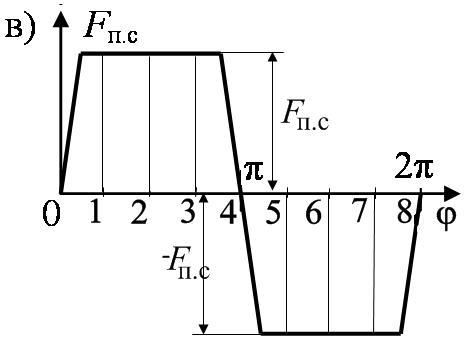
Рис. 8. Диаграмма сил полезных сопротивлений
Направление вектора силы полезного сопротивления Fп.с противоположно направлению вектора скорости ползуна υВ. Приложена сила Fп.с в точке В. Величина силы из задания Fп.с = 1,0 кН.
Реакции
в кинематических парах
определяем исходя из условия статического
равновесия структурных групп. Расчет
начинаем с группы шатун-ползун. Отделяем
её от механизма и изображаем на формате
А4 в выбранном ранее масштабе схемы
Кl
=
0,0075 м/мм (рис. 9). К звеньям группы в точках
приложения соответствующих сил
прикладываем силы тяжести
G2
и
G3,
силы инерции
Ф2
и
Ф3,
силы полезного сопротивления Fп.с.
Векторы этих сил показываем без соблюдения
масштаба. Удаленные связи заменяем
реакциями: в шарнире А
–
![]() ,
в паре ползун-направляющие −
,
в паре ползун-направляющие −![]() .
Неизвестную по величине и направлению
реакцию
,
раскладываем на составляющие:
нормальную
.
Неизвестную по величине и направлению
реакцию
,
раскладываем на составляющие:
нормальную
![]() ,
линия действия которой параллельна АВ,
и касательную
,
линия действия которой параллельна АВ,
и касательную
![]() ,
линия действия которой перпендикулярна
АВ.
Линия действия реакции
,
линия действия которой перпендикулярна
АВ.
Линия действия реакции
![]() перпендикулярна направляющим. Знак
направления векторов реакций (т.е. в
какую сторону они направлены) указываем
произвольно и уточняем при последующих
расчетах.
перпендикулярна направляющим. Знак
направления векторов реакций (т.е. в
какую сторону они направлены) указываем
произвольно и уточняем при последующих
расчетах.
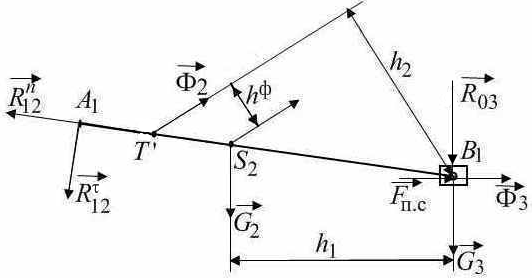
Рис. 9. Схема приложения сил группы шатун-ползун (1-е положение),
Kl = 0,0075 м/мм
![]()
– линия действия и величина в масштабе реакции R12 (R21) в шарнире А
– линия действия и величина в масштабе реакции R23 (R32) в шарнире В
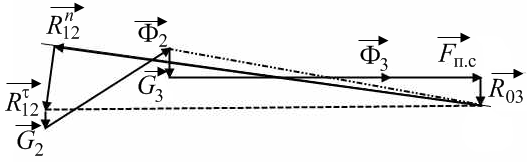
Рис. 10. План сил группы шатун-ползун (1-е положение),
КF = 40 Н/мм
Определению
подлежат параметры реакций
(рис. 9):
в шарнире А
(
или
![]() )
и в шарнире В
(
)
и в шарнире В
(![]() или
или![]() )
– величина
и направление;
в направляющих (
)
– величина,
направление
и точка приложения.
)
– величина
и направление;
в направляющих (
)
– величина,
направление
и точка приложения.