

Определение уравновешивающей силы по методу жуковского
Определение уравновешивающей силы может представлять самостоятельную задачу. В этом случае пользуются методом Жуковского, по которому Fу определяется без последовательного вычисления реакций в кинематических парах.
Для 1-го положения механизма строим план скоростей, на котором отмечаем точки приложения всех сил, действующих в системе (рис. 13). Масштабный коэффициент для плана скоростей можно использовать принятый ранее или, для наглядности рисунка, выбрать новый. Определим масштабный коэффициент плана скоростей для метода Жуковского:
Кυ = υА / = 3,9 / 80 = 0,048 ≈ 0,05 (м/с)/мм.
Принимаем стандартный масштаб Кυ = 0,05 (м/с)/мм.
Т огда:
огда:
![]() =
3,9/0,05
= 78 мм.
=
3,9/0,05
= 78 мм.
Из
рис. 13:
![]() =
64 мм;
=
64 мм;
![]() =
58 мм;
=
58 мм;
![]() = 22,8 мм.
= 22,8 мм.
Из
рис. 9 методом подобия:
![]() =
·
=
·![]() /
=20,5·58/100=
=12 мм.
/
=20,5·58/100=
=12 мм.
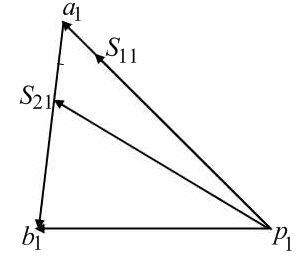
Рис. 13. План скоростей для 1-го положения механизма,
Кυ = 0,05 (м/с)/мм
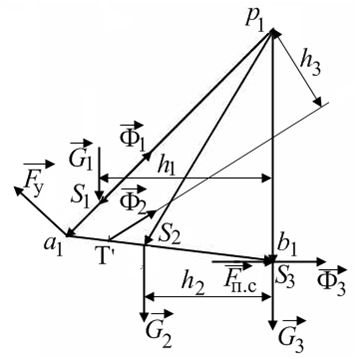
Рис. 14. Схема приложения сил для 1-го положения механизма
(метод Жуковского), Кl = Кυ = 0,05 м/мм
Согласно
методу Жуковского
план
скоростей
поворачиваем
на 90°
в любую сторону. В точки приложения сил
параллельно самим себе переносим
векторы внешних сил: силы тяжести
![]() ,
силы инерции
,
силы инерции
![]() ,
силы полезного сопротивления
.
Искомая уравновешивающая сила Fу
прикладывается в точке А
перпендикулярно
положению кривошипа. Направление
указываем произвольно.
,
силы полезного сопротивления
.
Искомая уравновешивающая сила Fу
прикладывается в точке А
перпендикулярно
положению кривошипа. Направление
указываем произвольно.
Составляем уравнение равновесия моментов всех сил относительно полюса плана скоростей точки p1:
– Fу · + G1 · + G2 · + Ф2 · + Fп.с · + Ф3 · = 0.
Из этого уравнения определяем величину и знак направления уравновешивающей силы Fу. Величины плеч замеряем на рис. 14.
Fу = (G1 · + G2 · + Ф2 · + Fп.с · + Ф3 · ) / =
= (98 · 47 +196 · 35 + 1640 · 25 + 1000 · 63 + 2415 · 63) / 78 =
= 3431,0 Н.
Численный результат получился положительным, знак направления вектора будет совпадать с принятым предварительно.
Величина уравновешивающей силы Fу, полученная ранее по методу с определением реакций в шарнирах, Fу = 3521,8 Н.
Расхождение значений определим по формуле
∆ = [(3521,8 – 3431,0) / 3521,8] ·100 % = 2,6% < (± 5 %).
Расхождение значений уравновешивающей силы Fу, полученных разными методами, находится в допустимых пределах (± 5 %).
6. Определение кпд механизма
После определения реакций в кинематических парах и уравновешивающей силы рассчитывается коэффициент полезного действия (КПД) механизма, который показывает потери мощности на трение в кинематических парах.
Вначале определяются мгновенные значения КПД для каждого i-го положения механизма по формуле
ηi = (Fу · υА) / (Fу · υА + Pт),
где Fу – уравновешивающая сила; υА – скорость точки А; Pт – потери мощности на трение в кинематических парах, Вт.
Pт = PО + PA + PB + Pпост , Вт.
Потери мощности на трение в шарнирах О, А и В будут соответственно:
PО = f ' · R01 · r1 · ω1, Вт,
PА = f ' · R12 · r2 · |ω1 ± ω2|, Вт,
PВ = f ' · R23 · r3 · ω2 , Вт,
где f ' – приведенный коэффициент трения. В расчетах можно принять f ' = 0,08…0,10; R01, R12, R23 – реакции в шарнирах, Н; ω1, ω2 – угловые скорости вращения соответственно кривошипа и шатуна, 1/с; r1, r2, r3 – радиусы цапф, м.
Знак «плюс» в расчете мощности силы трения в шарнире А берется, если угловые скорости кривошипа и шатуна противоположны, «минус» – имеют одинаковые направления. Принимаем «плюс», т.к направление ω1 – против часовой стрелки, а направление ω2 – по часовой стрелке.
Радиусы цапф (r1, r2, r3) определяем из условия работоспособности шарнирных узлов в качестве подшипников скольжения. Учитывая условия работы, переменность нагрузок на цапфы и имеющиеся данные, рассчитаем их диаметры по условию прочности на срез (рис. 15), допуская, что прочность на смятие выше (априори). Принимаем, что цапфы выполнены из стали Ст45; термообработка – улучшение (У); нагрузка III – знакопеременная. Пределы прочности: на срез [τср] = 90…100 МПа; на смятие [σсм] = 110…120 МПа.
Условие прочности на срез:
τ ср
= √ 4R
/ π
· d2
≤ [τср],
ср
= √ 4R
/ π
· d2
≤ [τср],
где R – реакция в шарнире, Н; π = 3,14; d – диаметр цапфы, мм.
Рис. 15
Определяем расчётные диаметры цапф для первого положения:
![]() = 7,6 мм;
= 7,6 мм;
![]() = 8,1 мм;
= 8,1 мм;
![]() = 6,9 мм.
= 6,9 мм.
Учитывая безопасность работы, температурный режим, знакопеременность нагрузки, сменность и другие условия работы механизма, примем значения соответствующих коэффициентов для подшипниковых узлов в пределах:
Кб = 1,0…3,0 – коэффициент безопасности;
Кр = 1,3…1,5 – коэффициент режима работы при ударной нагрузке;
Кт = 1,0…1,4 – температурный коэффициент.
Тогда:
d01
=
![]() ·
Кб
· Кр
· Кт
= 7,6 · 2 · 1,3 ·1,2 = 23,7 мм;
·
Кб
· Кр
· Кт
= 7,6 · 2 · 1,3 ·1,2 = 23,7 мм;
d12
=
![]() · Кб
· Кр
· Кт
= 8,1 · 2 · 1,3 ·1,2 = 25,3 мм;
· Кб
· Кр
· Кт
= 8,1 · 2 · 1,3 ·1,2 = 25,3 мм;
d23
=
![]() ·
Кб
· Кр
· Кт
= 6,9 · 2 · 1,3 ·1,2 = 21,5 мм.
·
Кб
· Кр
· Кт
= 6,9 · 2 · 1,3 ·1,2 = 21,5 мм.
Примем диаметр цапфы для всех шарниров (О, А, В) с учётом унификации деталей
dц = 26 мм,
тогда r1= r2 = r3 = 0,013 м.
Силовой анализ проводился для 1-го положения механизма, поэтому мгновенный КПД определим тоже для 1-го положения.
П отери
мощности на трение в шарнирах О, А и В
будут соответственно:
отери
мощности на трение в шарнирах О, А и В
будут соответственно:
PО = f ' · R01 · r1 · ω1 = 0,1·4080 · 0,013 · 26 = 137,9 Вт,
PА = f ' · R12 · r2 · |ω1 ± ω2| = 0,1·4720 · 0,013 · (26 + 3,9) = 183,5 Вт,
PВ = f ' · R23 · r3 · ω2 = 0,1·3440 · 0,013 · 3,9 = 17,4 Вт.
Потери мощности на трение в поступательной паре
Pпост = f · R03 · υВ = 0,1· 312 · 3,2 = 99,8 Вт,
где f – коэффициент трения скольжения в поступательной паре, f = 0,10... 0,12; R03 – реакция в поступательной паре, R03 = 312 Н; υВ – скорость ползуна, υВ = 3,2 м/с.
Потери мощности на трение в кинематических парах
Pт = PО + PA + PB + Pпост = 137,9 + 183,5 + 17,4 + 99,8 = 438,6 Вт.
Мгновенный КПД для первого положения при Fу = 3521,8 Н; υА = 3,9 м/с: Pт = 438,6 Вт
η1 = (Fу · υА) / (Fу · υА + Pт) = (3521,8·3,9) / (3521,8·3,9 + 438,6) =
=13735,0 / 14173,6 = 0,97 < 1.
Коэффициент полезного действия всего механизма определяется как среднее значение мгновенных КПД в каждом i-м положении
k
ηм = ∑ηί / k,
ί
где i – рассматриваемое положение механизма (i =1…k): k – количество рассматриваемых положений механизма в течение периода, k = 8.