

Предисловие
В расчётно-графической работе проводится структурный, кинематический и силовой анализ кривошипно-ползунного механизма горизонтального поперечнопильного станка.
Поперечнопильный станок предназначен для поперечной распиловки брёвен на кряжи и чурки. Рабочий цикл не имеет холостого хода: прямой и обратный ходы ползуна (крейцкопфа) – рабочие. Полотно пилы укрепляется на крейцкопфе.
Сила полезных сопротивлений (сила сопротивления резанию) условно прикладывается к ползуну и направлена против его движения.
Исходные данные
Задание …, вариант …
Горизонтальный поперечнопильный станок
(схема механизма)
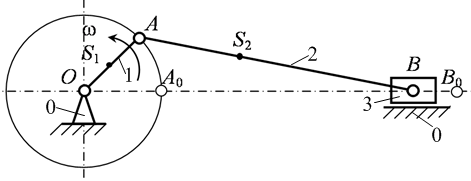
Рис. 1
Т а б л и ц а 1
П а р а м е т р ы |
Д а н н ы е |
Длина кривошипа ОА, мм |
150 |
Длина шатуна АВ, мм |
750 |
Расстояние ОS1, мм |
125 |
Расстояние АS2 , мм |
300 |
Частота вращения кривошип п, об/мин |
250 |
Масса кривошипа т1, кг |
10 |
Масса шатуна т2, кг |
20 |
Масса пильной рамки т3, кг |
35 |
Сила полезных сопротивлений Fп.с., кН |
1,0 |
Момент инерции шатуна J2, кг· м2 |
1,5 |
Положение механизма для силового анализа |
1 |
2. Структурный анализ
Структурный анализ включает определение количества структурных групп, их классификацию по Ассуру–Артоболевскому и определение степени подвижности механизма.
Исследуемый кривошипно-ползунный механизм состоит из группы шатун-ползун (звенья 2 и 3), представляющей собой группу Ассура 2-го класса, 2-го порядка, 2-го вида (по классификации Ассура–Артоболевского), и начального звена в виде кривошипа (звено 1) со стойкой (звено 0) (рис. 2).
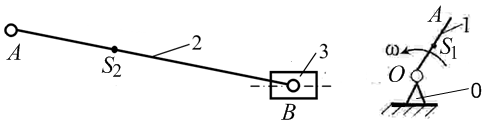

Рис. 2
Исследуемый кривошипно-ползунный механизм является плоским, т.к. все звенья движутся в параллельных плоскостях. Степень подвижности плоских механизмов определяется по формуле Чебышева
W = 3n – 2р5 – р4,
где n – число подвижных звеньев; р5 – число кинематических пар 5-го класса; р4 – число кинематических пар 4-го класса.
Кривошипно-ползунный механизм (рис.1) имеет одно неподвижное звено стойку 0; три подвижных звена: кривошип 1, шатун 2, ползун 3; четыре низшие кинематические пары: три вращательные – кривошип 1 со стойкой 0, кривошип 1 с шатуном 2, шатун 2 с ползуном 3 и одну поступательную – ползун 3 с направляющими 0. Высшие пары в заданном механизме отсутствуют, т.е. р4 = 0. Следовательно,
W = 3·3 – 2·4 – 0 = 1.
Р асчет
степени подвижности для данного механизма
является проверочным, так как
количество законов движения (один) или
количество начальных звеньев (одно –
кривошип) известно из задания.
асчет
степени подвижности для данного механизма
является проверочным, так как
количество законов движения (один) или
количество начальных звеньев (одно –
кривошип) известно из задания.
КИНЕМАТИЧЕСКИЙ АНАЛИЗ
Кинематический анализ проводится для того, чтобы по заданному закону движения начального звена (частоте вращения кривошипа) определить положения звеньев, их перемещения, угловые скорости и ускорения, траектории движения характерных точек механизма (центров шарниров А и В, центров масс S1 и S2), их скорости и ускорения.
Кинематический анализ проводится методом планов. На чертеже строятся планы положений механизма в течение периода и соответствующие им планы скоростей и ускорений. Результаты полученных значений ускорений и перемещений ползуна проверяются на диаграммах, полученных соответственно методом графического дифференцирования (для ускорений) и интегрирования ( для перемещений) графика скоростей. Анализ ведется в направлении от начального звена к группе шатун-ползун. Результаты расчетов и построений представляются в виде диаграмм, таблиц, годографов.