

И скоростей
Наименование параметров |
П о л о ж е н и е м е х а н и з м а |
|||||||
0 (8) |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
Вектор ра, мм |
52,0 |
52,0 |
52,0 |
52,0 |
52,0 |
52,0 |
52,0 |
52,0 |
Скорость υА, м/с |
3,9 |
3,9 |
3,9 |
3,9 |
3,9 |
3,9 |
3,9 |
3,9 |
Вектор рb, мм |
0 |
42,5 |
52,0 |
32,0 |
0 |
32,0 |
52,0 |
42,5 |
Скорость υB, м/с |
0 |
3,2 |
3,9 |
2,4 |
0 |
2,4 |
3,9 |
3,2 |
Вектор ab, мм |
52,0 |
38,0 |
0 |
38,0 |
52,0 |
38,0 |
0 |
38,0 |
Скорость υBA, м/с |
3,9 |
2,9 |
0 |
2,9 |
3,9 |
2,9 |
0 |
2,9 |
Вектор рs1, мм |
43,3 |
43,3 |
43,3 |
43,3 |
43,3 |
43,3 |
43,3 |
43,3 |
Скорость υS1, м/с |
3,2 |
3,2 |
3,2 |
3,2 |
3,2 |
3,2 |
3,2 |
3,2 |
Отрезок аs2, мм |
20,8 |
15,2 |
0 |
15,2 |
20,8 |
15,2 |
0 |
15,2 |
Вектор рs2, мм |
31,2 |
44,5 |
52,0 |
41,5 |
31,2 |
41,5 |
52,0 |
44,5 |
Скорость υS2, м/с |
2,3 |
3,3 |
3,9 |
3,1 |
2,3 |
3,1 |
3,9 |
3,3 |
Скорость υS3= υB, м/с |
0 |
3,2 |
3,9 |
2,4 |
0 |
2,4 |
3,9 |
3,2 |
Угловая скорость кривошипа ω1, 1/с |
26 |
26 |
26 |
26 |
26 |
26 |
26 |
26 |
Угловая скорость шатуна ω2, 1/с |
5,2 |
3,9 |
0 |
3,9 |
5,2 |
3,9 |
0 |
3,9 |
3.3. Определение ускорений
Линейные ускорения точек А, В и центров масс S1, S2 определяем графическим методом аналогично определению скоростей.
Линейное ускорение точки А, совершающей равномерное вращательное движение, определяем по формуле
aАn = υА2 / OA = 3,92 / 0,150 = 101,4 м/с2.
![]()
Вектор
ускорения
![]() приложен в точке А,
действует параллельно радиусу вращения
ОА
и направлен к центру вращения точке О.
приложен в точке А,
действует параллельно радиусу вращения
ОА
и направлен к центру вращения точке О.
Линейное
ускорение точки В определяем
графически, используя правило сложения
векторов (план ускорений). Для построения
в формате А4 выбираем масштабный
коэффициент плана ускорений, используя
известную величину нормального ускорения
точки А – аАn
= 101,4 м/с2 и представляющий его в
масштабе отрезок
![]() = 50 мм:
= 50 мм:
Ка
= аАn
/
![]() = 101,4 / 50 = 2,03 ≈ 2,0 (м/с2) / мм.
= 101,4 / 50 = 2,03 ≈ 2,0 (м/с2) / мм.
Д ля
построения плана ускорений принимаем
масштабный коэффициент стандартный
Ка = 2,0 (м/с2) / мм. Тогда
пересчитываем отрезок
ля
построения плана ускорений принимаем
масштабный коэффициент стандартный
Ка = 2,0 (м/с2) / мм. Тогда
пересчитываем отрезок ![]() :
:
= аАn / Ка = 101,4 / 2,0 = 50,7 мм.
Величину и направление ускорения шарнира В определяем совместным решением системы двух векторных уравнений:

![]()
![]()
![]()
Первое
уравнение – когда шарнир В принадлежит
шатуну АВ и совершает с ним
сложное движение, состоящее из переносного
плоскопараллельного движения с ускорением
точки А – вектор
,
и вращательного движения точки В
относительно шарнира А – вектор
![]() .
Вектор
.
Вектор
![]() направлен параллельно положению
кривошипа и к центру его вращения точке
О. Вектор
(вращательное движение) раскладываем
на два вектора: нормальное ускорение
направлен параллельно положению
кривошипа и к центру его вращения точке
О. Вектор
(вращательное движение) раскладываем
на два вектора: нормальное ускорение
![]() (вектор приложен в точке В, действует
параллельно положению шатуна и направлен
к центру вращения точке А); касательное
ускорение
(вектор приложен в точке В, действует
параллельно положению шатуна и направлен
к центру вращения точке А); касательное
ускорение
![]() (линия действия проходит через точку В
перпендикулярно положению шатуна).
(линия действия проходит через точку В
перпендикулярно положению шатуна).
Нормальное ускорение аВАn определяем по формуле
аВАn = υВА2 / AВ м/с2.
В масштабе отрезок
![]() =
=
![]() = аВАn
/ 2,0 мм.
= аВАn
/ 2,0 мм.
Полученные для 8 положений значения переносим в табл. 4 и на планы ускорений.
Второе
уравнение – когда шарнир В принадлежит
ползуну и совершает с ним
возвратно-поступательное движение
относительно направляющих Вх.
Вектор
![]() действует параллельно направляющим.
действует параллельно направляющим.
План ускорений для 8 положений исследуемого механизма представлен на рис. 5.
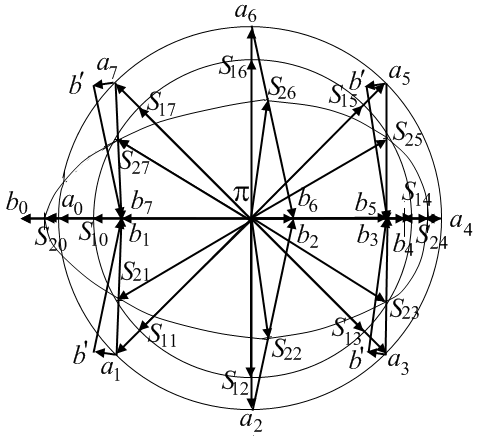
Рис. 5. Планы и годографы ускорений, Кa = 2,0 (м/с2) / мм
Последовательность
построения плана ускорений следующая.
Выбираем полюс π. Из
него согласно первому векторному
уравнению проводим вектор ускорения
точки А –
в масштабе (отрезок
).
Затем из конца отрезка
(точка а) проводим вектор
![]() в
масштабе (отрезок ) параллельно шатуну.
Через конец отрезка
(точка b') проводим
линию действия вектора ускорения
перпендикулярно положению шатуна.
в
масштабе (отрезок ) параллельно шатуну.
Через конец отрезка
(точка b') проводим
линию действия вектора ускорения
перпендикулярно положению шатуна.
Согласно
второму векторному уравнению через
полюс π проводим линию
действия вектора
до пересечения с линией действия вектора
![]() в точке b. Соединим
точки а и b. Отрезок
на плане ускорений изображает вектор
относительного ускорения
.
В получившемся многоугольнике расставим
последовательно знаки направления
векторов – стрелочки.
в точке b. Соединим
точки а и b. Отрезок
на плане ускорений изображает вектор
относительного ускорения
.
В получившемся многоугольнике расставим
последовательно знаки направления
векторов – стрелочки.
Положение центров масс S1 и S2 на плане ускорений определяем методом подобия, составив пропорции:
![]() /
= ОS1 / ОА, откуда
= (· ОS1) / ОА =
·125/150 =… мм;
/
= ОS1 / ОА, откуда
= (· ОS1) / ОА =
·125/150 =… мм;
![]() /
= АS2 / АВ, откуда
= (
·
АS2) / АВ =
·300/750 =… мм.
/
= АS2 / АВ, откуда
= (
·
АS2) / АВ =
·300/750 =… мм.
Полученные значения переносим в табл. 4 и на планы ускорений.
Векторы ускорений центров масс направлены из полюса π к точкам S1 и S2.
Планы ускорений для всех положений механизма строим из одного полюса и на них показываем годографы aА, aB, aS1, a S2. Годографы – это линии, соединяющие концы одноименных векторов.
Т а б л и ц а 4
Величины векторов ускорений в масштабе Ка = 2,0 (м/с2) / мм