

3.1. Схема механизма (8 положений)
Строим 8 положений механизма с траекториями движения шарниров А и В и центров масс звеньев S1 и S2. Для построения в формате А4 выбираем масштабный коэффициент схемы:
Kl
= OA /
![]() =
0,150 / 20 = 0,0075 м/мм.
=
0,150 / 20 = 0,0075 м/мм.
Принимаем масштабный коэффициент схемы по ГОСТ Kl = 0,0075 м/мм.
Тогда на схеме отрезки соответствующих звеньев и расстояний будут:
![]() =
0,150 / 0,0075 = 20 мм;
=
0,150 / 0,0075 = 20 мм;
![]() =
0,750 / 0,0075 = 100 мм;
=
0,750 / 0,0075 = 100 мм;
![]()
![]() = 0,125 / 0,0075 = 17 мм;
= 0,125 / 0,0075 = 17 мм;
![]() =
0,300 / 0,0075 = 40 мм.
=
0,300 / 0,0075 = 40 мм.
С хема
механизма в 8 положениях представлена
на рис. 3.
хема
механизма в 8 положениях представлена
на рис. 3.
Построение начинаем с вычерчивания траекторий точек А (окружность радиусом = 20 мм) и S1 (окружность радиусом = 17 мм), совершающих вращательное движение, и точки В, совершающей прямолинейное движение. Делим траекторию точки А на 8 равных частей методом засечек. Начальное (нулевое) положение точек А0 и В0 обозначено на схеме задания. Далее проставляем нумерацию положения точек А1, А2 … А7 по направлению вращения кривошипа. Положение точки А8 совпадает с положением А0. Соединяем точки А0 … А7 с центром вращения кривошипа точкой О. На пересечении линий ОА с траекторией точки S1 отмечаем положение точек S10, S11… S17, S10. Далее из точек А1, А2… А7 радиусом = 100 мм делаем засечки на траектории точки В, обозначая их соответственно В1… В7. Соединяем точки А и В в соответствующих положениях, получаем 8 положений шатуна. На каждом положении шатуна определяем положение точки S2, откладывая от точки А отрезок = 40 мм. Траекторией движения точки S2 будет кривая, соединяющая последовательно положения точек S20, S21…S27, S20. Положение механизма № 1 выделяем жирной линией, добавляем в рисунок ползун в направляющих Вх и стойку О.
Перемещения ползуна замеряем из схемы механизма (рис.3). Результаты заносим в табл. 2.
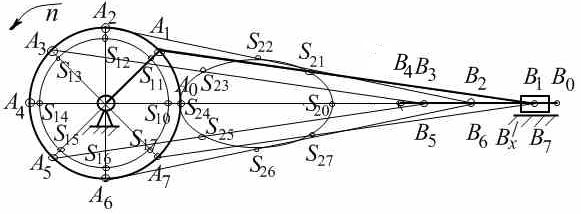
Рис. 3. Схема механизма (8 положений), Kl = 0,0075 м/мм
Т а б л и ц а 2
Величины перемещений lB ползуна В
Наименование параметров |
П о л о ж е н и е п о л з у н а |
|||||||
0 (8) |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
Отрезки lB, мм |
0 |
6,6 |
22,5 |
35,2 |
42,4 |
35,2 |
22,5 |
6,6 |
Перемещения lB, м |
0 |
0,0495 |
0,168 |
0,264 |
0,318 |
0,264 |
0,168 |
0,0495 |
3.2. Определение скоростей
Линейные скорости точек А, В и центров масс S1, S2 определяем графическим методом.
Линейную скорость точки А , совершающей вращательное движение, определяем по формуле
υА = π·ОА·n / 30 = 3,14 · 0,150 ·250 / 30 = 3,9 м/с,
где π = 3,14; ОА – длина кривошипа, ОА = 0,150 м; n – частота вращения кривошипа, n = 250 об/мин.
Вектор
скорости
![]() приложен в точке А, действует
перпендикулярно радиусу вращения ОА
и направлен в сторону вращения.
приложен в точке А, действует
перпендикулярно радиусу вращения ОА
и направлен в сторону вращения.
Линейную
скорость точки В определяем
графически, используя правило сложения
векторов (план скоростей). Для построения
в формате А4 выбираем масштабный
коэффициент плана скоростей, используя
известную скорость точки А (υА
= 3,9 м/с). Принимаем предварительно
величину вектора υА в масштабе
![]() =
50 мм. Тогда
=
50 мм. Тогда
Кυ = υА / = 3,9 / 50 = 0,078 ≈ 0,075 (м/с) / мм.
Для
построения плана скоростей принимаем
стандартный масштабный коэффициент Кυ
= 0,075 (м/с) / мм. Тогда пересчитываем отрезок
![]() :
:
= υА / Кυ = 3,9 / 0,075 = 52 мм.
В еличину
и направление скорости точки В
определяем совместным решением системы
двух векторных уравнений.
еличину
и направление скорости точки В
определяем совместным решением системы
двух векторных уравнений.

![]()
![]()
Первое
уравнение – когда шарнир В принадлежит
шатуну АВ и совершает с ним
сложное движение, состоящее из переносного
движения точки А – вектор
![]() ,
и вращательного движения точки В
относительно точки А – вектор
,
и вращательного движения точки В
относительно точки А – вектор
![]() .
Вектор
действует перпендикулярно положению
кривошипа и направлен в сторону его
вращения. Вектор
действует перпендикулярно положению
шатуна.
.
Вектор
действует перпендикулярно положению
кривошипа и направлен в сторону его
вращения. Вектор
действует перпендикулярно положению
шатуна.
Второе
уравнение – когда шарнир В
принадлежит ползуну и совершает
с ним возвратно-поступательное движение
относительно направляющих Вх.
Вектор
![]() действует параллельно направляющим.
действует параллельно направляющим.
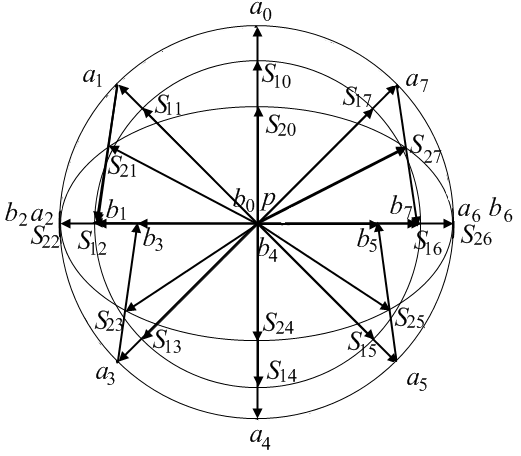
Рис. 4. Планы и годографы скоростей, Кυ = 0,075 (м/с) / мм
П лан
скоростей для 8
положений исследуемого механизма
представлен на рис. 4.
лан
скоростей для 8
положений исследуемого механизма
представлен на рис. 4.
Последовательность
построения плана скоростей следующая.
Выбираем полюс p.
Из него согласно первому векторному
уравнению проводим вектор скорости
точки А
–
в масштабе (отрезок ). Затем из конца
отрезка
(точка
а)
проводим линию действия вектора
перпендикулярно шатуну. Согласно второму
векторному уравнению через полюс p
проводим линию действия вектора
до пересечения с линией действия вектора
![]() в точке b.
Отрезок
в точке b.
Отрезок
![]() на плане скоростей изображает вектор
относительной скорости
на плане скоростей изображает вектор
относительной скорости
![]() .
В получившемся многоугольнике расставим
последовательно знаки направления
векторов – стрелочки.
.
В получившемся многоугольнике расставим
последовательно знаки направления
векторов – стрелочки.
Положение центров масс S1 и S2 на плане скоростей определяем методом подобия, составив пропорции:
![]() /
= ОS1 / ОА, откуда = (
·
ОS1) / ОА =
·125/150
=… мм;
/
= ОS1 / ОА, откуда = (
·
ОS1) / ОА =
·125/150
=… мм;
/ = АS2 / АВ, откуда = (· АS2) / АВ = ·300/750 =… мм.
Полученные значения переносим в табл. 3 и на планы скоростей. Векторы скоростей центров масс направлены из полюса p к точкам S1 и S2.
Планы скоростей для всех положений механизма строим из одного полюса и на них показываем годографы υА, υ S1, υ S2. Годографы – это линии, соединяющие концы одноименных векторов.
Натуральные величины скоростей определяем из плана скоростей (рис. 4) по формулам:
υВ
=
![]() · Кυ , м/с; υВА
=
· Кυ , м/с;
· Кυ , м/с; υВА
=
· Кυ , м/с;
υS1
=
· Кυ , м/с; υS2
=
![]() · Кυ , м/с; υS3
= υВ , м/с.
· Кυ , м/с; υS3
= υВ , м/с.
Величины угловых скоростей кривошипа ω1 и шатуна ω2 определяем по формулам:
ω1 = υА /ОА , 1/с ; ω2 = υАВ /АВ , 1/с.
Результаты вычислений представлены в табл. 3.
Т а б л и ц а 3
а б л и ц а 3
Величины векторов скоростей в масштабе Кυ = 0,075 (м/с) / мм