

6. Управление двухпозиционными и трехпозиционными механизмами. Особенности управления гидравлическими и пневматическими устройствами.
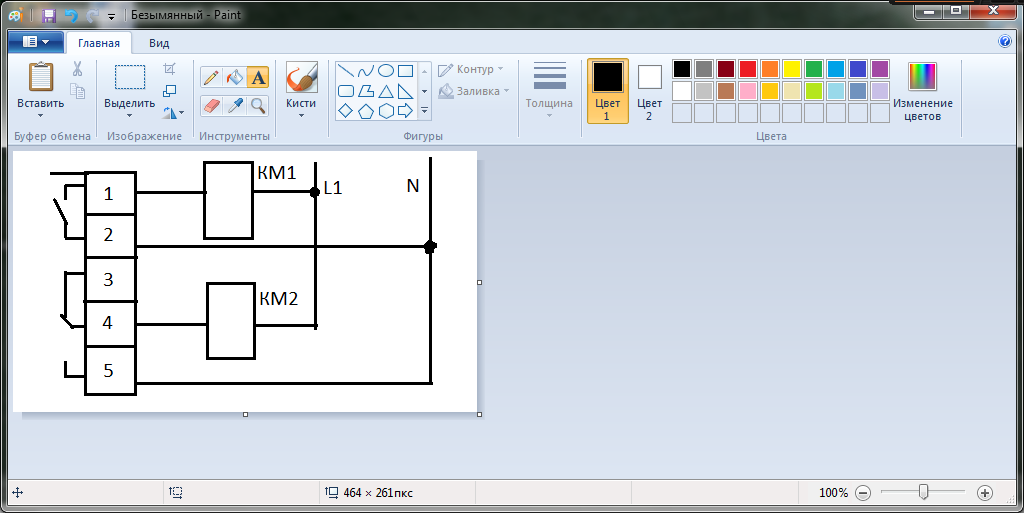
Формирование команды обычно осуществляется управляющим устройством (реле, контактор и т.д.) путем замыкания соответствующей цепи.
В механизмах с возвратно-поступательным действием или поворотным перемещение подвижного звена физически ограничено. При достижении крайнего положения происходит принудительная остановка двигателя. Если двигатель не отключить, он выйдет из строя вследствие перегрева. Поэтому в крайних положениях обычно устанавливают конечные выключатели, с помощью которых производится отключение двигателя.
Особенности управления гидравлическими и пневматическими исполнительными устройствами
Гидро- и пневмоустройства дискретного действия (гидро- и пневмоцилиндры) отличаются тем, что при достижении поршнем крайнего положения их можно не отключать от источника, т.е. команда на перемещение может не отменяться. Поэтому число команд управления такими устройствами может быть на единицу меньше. Для управления обычно используются распределители с электромагнитом и возвратной пружиной.
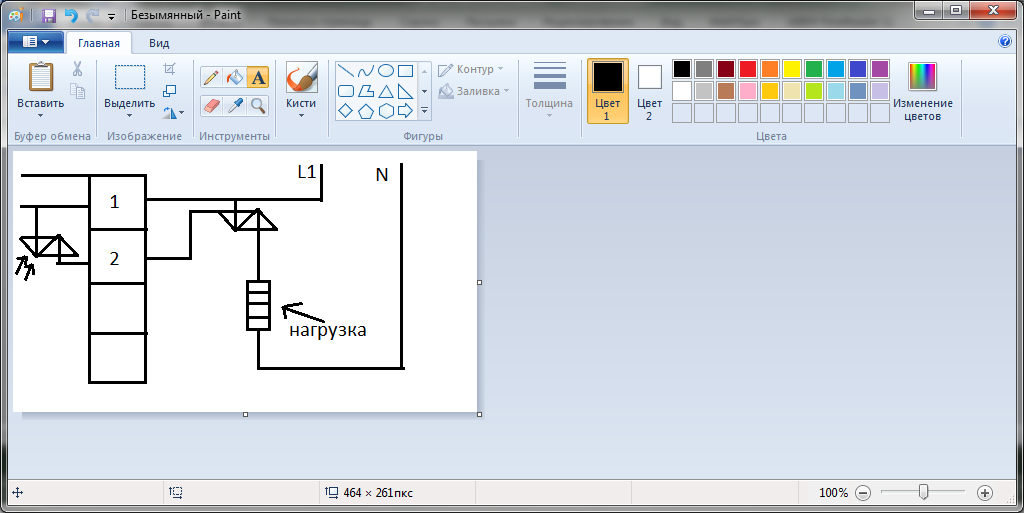
В данной схеме для управления используется одна команда на прямой ход поршня. Она обеспечивается подачей управляющего напряжения на электромагнит Yпневмораспределителя. При этом распределитель переключается на прямой ход поршня. Снятие данной команды приводит к возврату распределителя в исходное состояние под действием пружины и обратному ходу поршня.
Аналогично может работать и гидропривод, если не требуется остановка поршня в промежуточных положениях.
При необходимости остановки поршня в промежуточных положениях для управления гидроцилиндрами используют трехпозиционные распределители.

В данном случае распределитель содержит два электромагнита Y1 и Y2 и возвратные пружины. Команды на рабочий и обратный ход подаются за счет подачи напряжения на электромагниты Y1, Y2. Снятие обеих команд приводит к остановке поршня.
7. Управление циклом в функции времени. Циклограмма работы механизмов.
При
данном способе команды на изменение
состояния механизмов формируются в
определённые моменты времени и
поддерживаются на протяжении определённых
временных интервалов. Последовательность
работы механизмов задаётся циклограммой
.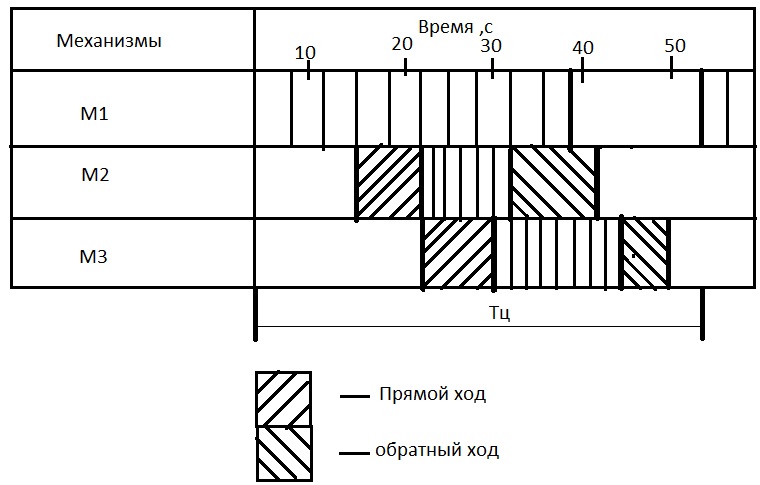
Недостатки :в процессе движения механизмов скорость может изменятся под действием нагрузки и других факторов в определённых пределах .В результате при заданном времени перемещения его величина может изменяться , поэтому данный способ обычно применяют при невысоких требованиях точности отработки перемещения.
8. Управляющие устройства. Передача команд на исполнительные механизмы. Контроль выполнения команд. Реализация блокировок.
Для управления используются различные устройства , обеспечивающие заданные промежутки времени интервала в небольших пределах можно использовать электромагнитное реле времени.

Для
управления несколькими механизмами
можно использовать многоцепные приборы
или электромеханическое реле в данных
устройствах переключения контактов
осуществления с помощью кулачков
установленных на валу , который вращается
с постоянной скоростью.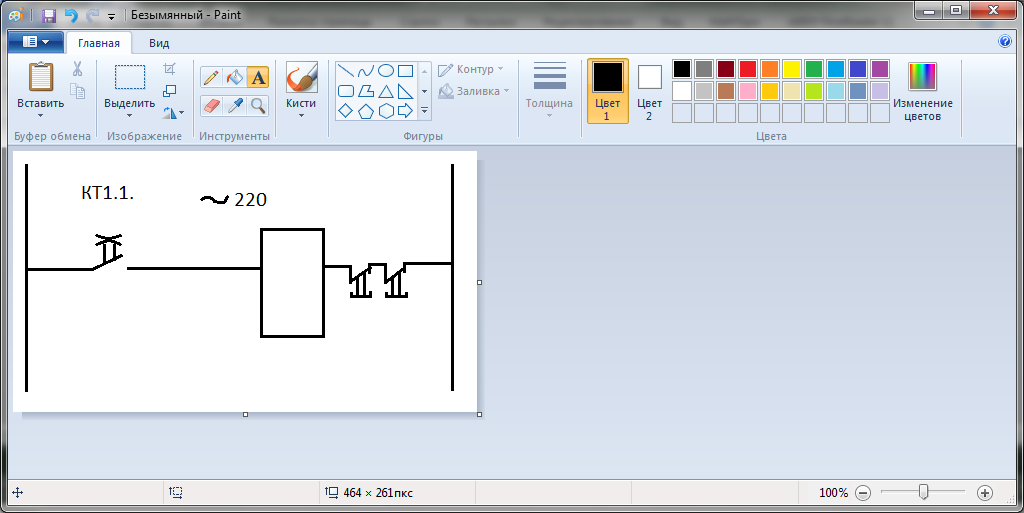
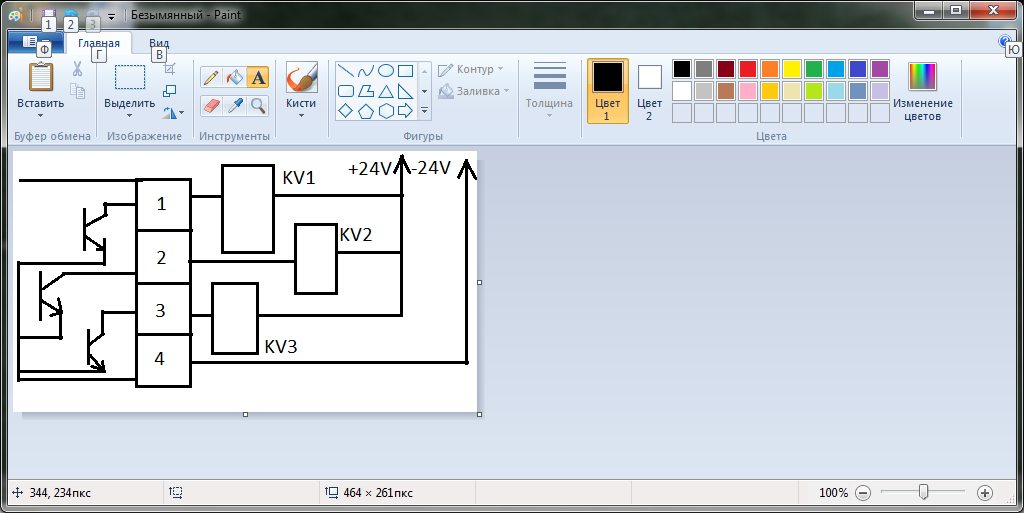
В настоящие время для управления механизмами функции времени обычно используют программируемые контроллеры .В этом случае появление сигналов управления сигналов управления механизмами на дискретных выходах определяется программой. Подключение исполнительных механизмов к выходных осуществляется через промежуточные устройств (реле, контроллеры). Схема подключения зависит от типа выхода.
А)Выход в виде контактов реле: Б)выход-открытый коллектор транзистора.
В)выход в виде симистора или тиристора
Г)выход унифицированный 0…10V;4…20 mA
В этом случае для подключения нагрузки могут использоваться специальные блоки управления симисторами и тиристорами.
При необходимости точной отработки перемещения некоторыми механизмами может использоваться контроль перемещения с помощью конечных выключателей .При этом механизм включается по времени ,а отключается по сигналу конечного выключателя.
Кроме того ,цепи управления могут содержать элементы блокировки и защиты .