

1. Понятие механизма. Основные сведения о механизмах. Исполнительные устройства.
Механизм – устройство для преобразования механического движения твердых тел. Они используются для выполнения различных технологических и вспомогательных операций, тем самым они облегчают труд человека и являются средствами механизации.
Изначально это были механические устройства, обычно твердые, затем гидравлические и пневматические.
Для преобразования движения могут использоваться жидкость или газ и соответствующие механизмы- гидравлические и пневматические.
В результате преобразования изменяются параметры или вид движения: угловая скорость, вращательное или поступательное и т.д. Т.е. может измен характер движения или параметры движения, например, скорость или изменен по определенному закону.
Механизмы состоят из звеньев. Звено механизма – твердое тело, состоящее из отдельных ччастей (деталей), соединенных друг с другом так, что их взаимное положение не изменяется.
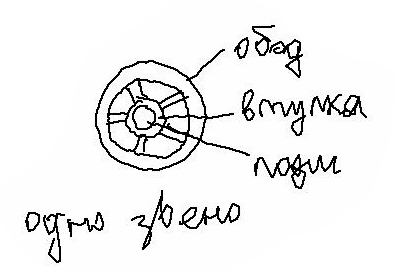
Звенья соединяются между собой подвижно. Подвижное соединение двух соприкасающихся звеньев – кинематическая пара
Механизм содержит определенное количество звеньев, соединенных др. с др. Каждый мех сод одно неподвижное звено, которое называется стойкой.
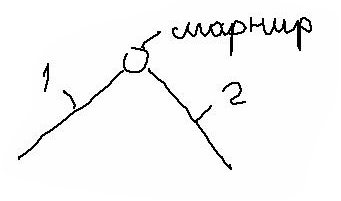
Входным называется звено, которому сообщается движение, подлежащее преобразованию
Выходное звено – звено, совершающее движение, для выполнения которого предназначен механизм.
1 – входное звено, 2 – выходное звено. Все остальные звенья – промежуточные.
Обычно механизм содержит одно входное и одно выходное звено, но встречаются механизмы, содержащие несколько входных и выходных звеньев.
Механизмы могут использоваться отдельно для выполнения определенной операции или входить в состав машин, приборов, аппаратов.
Машина может содержать несколько механизмов, объединенных одной системой управления.Машина предназначена для выполнения каких-либо функций.
Повысить эффективность использования механизмов можно за счет оснащения их приводным исполнительным устройством и системы управления. Она может обеспечивать пуск и остановку двигателя, регулирование скорости и т д. Это может осуществляться с участием человека (команды выдаются оператором) или без участия человека (команды вырабатываются системой управления).
Исполнительные устройства (электродвигатели, гидро- и пневмоцилиндры) по определению к механизмам не относятся, но они могут входить в состав машин и использоваться для привода механизмов. Они являются выходными звеньями системы управления машин и механизмов, поэтому задача автоматизации средств механизации фактически состоит в построении систем управления исполнительными устройствами. Наличие преобразующего механизма учитывается при необходимости относительно просто.
Решение задачи осложняется тем, что современные механизмы работают в составе машин или систем машин. Управление такими механизмами не может осуществляться независимо. Работа механизмов должна быть определенным образом синхронизирована. Эту функцию выполняет общая система управления. Часто функцию синхронизации фактически выполняют манипуляционные механизмы, осуществляющие передачу обрабатываемых изделий с одной позиции на другую, а также их ориентацию, загрузку, выгрузку и т.д.
Поэтому в данном курсе будет уделено значительное внимание системам управления манипуляционными механизмами. В данную группу входят манипуляторы.