

2. Манипуляторы. Промышленные роботы. История развития робототехники.
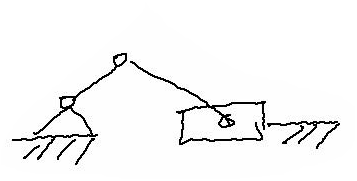
Манипулятор – техническое устройство, предназначенное для воспроизведения рабочих функций руки человека.
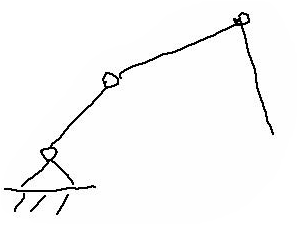
При этом конструктивно сходство с рукой человека не всегда имеет место, например рука манипулятора может удлиняться, поэтому основной признак – возможность перемещения рабочего органа любого органа некоторой области рабочего пространства.
Манипулятор – основная составная часть робота.
Промышленный робот – универсальная программируемая машина, обладающая определенными антропоморфными свойствами. Он отличается от манипулятора развитой системой управления и обладает способностью к перепрограммированию. Соответственно – это более универсальное устройство.
Рабочий ведет руку манипулятора, затем система повторяет это движение.
Робот – программируемый, многофункциональный манипулятор, предназначенный для перемещения материалов, деталей, инструментов или специальных устройств путем программно изменяемых движений для выполнения разнообразных задач. Появились с возникновением вычислительных машин.
В 1954 году в США была подана первая заявка на патент на манипулятор для перемещение материалов. Первый серийный робот – в 1970 году.
3. Характеристика дискретных технологических процессов. Понятие жизненного цикла изделия. История развития средств автоматизации.
Основные характеристики производства
Дискретное производство отличается тем, что обработка или изготовление изделий производится в агрегатах периодического действия, которые работают циклически. Для изготовления одного или группы изделий необходимо выполнить определенную последовательность операций (циклов). Для изготовления последующей группы цикл повторяется.
При дискретном производстве выпускаемая продукция может исчисляться единицами (штуками), хот можно использовать и единицы массы.
Жизненный цикл изделия
Включает в себя промежуток времени от начала проектирования какого-либо изделия до окончания производства данного вида изделий
где tпр – время проектирования,
 , tпп
– время подготовки производства,
, tпп
– время подготовки производства,
tтп – время технологических процессов,
Современной тенденцией является сокращение жизненного цикла выпускаемых изделий. Это обусловлено постоянным ростом требований к свойствам изделий.
Сократить жизненный цикл можно за счет всех трех составляющих. Уменьшение затрат на проектирование достигается внедрением систем автоматизированного проектирования (САПР).
Ускорение подготовки производства обеспечивается за счет использования вычислительной техники для операций планирования и др.
Повышение производительности технологических процессов обеспечивается за счет внедрения средств автоматизации.
Производится одно изделие, а проектируется уже следующее.
История развития
На первоначальном этапе автоматизировалось в основном массовое и крупносерийное производство за счет внедрения поточных (операции выполняются вручную) и автоматических линий.
Широкое внедрение ИПС началось примерно с 70х годов XXвека и обусловлено развитием средств вычислительной техники и числового программного управления.