

Прямое и обратное преобразование Лапласа, основные свойства, примеры преобразований.
Преобразование Лапласа:
![]()
1.
Линейность
![]()
2.
Теорема об дифф-ии:
![]()
3.
Теорема об интегр-ии:
![]()
4. Т. о смещении изобр.:
![]()
Т. о запаздыв. ориг-ла:

Т. о свертыв. ориг-ла:
![]()
Т. о масштаб-нии:
П римеры
преобразований:
римеры
преобразований:
Дифференциальная и операторная формы уравнений сау.
С АУ
описыв-ся ДУ. Лин. системы (одноконтурные)
м/б описаны одним ДУ, связ-щим изм-ие
задающего возд-ия g(t)
и рез-ты этого возд-ия x(t).
В зав-ти от сложности системы ур-ие
также м/б более или менее сложным. В
общем виде:
АУ
описыв-ся ДУ. Лин. системы (одноконтурные)
м/б описаны одним ДУ, связ-щим изм-ие
задающего возд-ия g(t)
и рез-ты этого возд-ия x(t).
В зав-ти от сложности системы ур-ие
также м/б более или менее сложным. В
общем виде:
в![]()
![]()
![]()
![]() ыход
вход
ыход
вход
![]()
![]()
![]()
![]()
– Mm(p)
– Dn(p)
W(p)-передаточная ф-ция
![]()
Передат. Ф-ция динамич. Системы. Свойства передаточной функции.
– Mm(p)
– Dn(p)
W(p)–передаточная ф-ция
Осн. св-ва передат. ф-ции (ПФ):
1) ПФ явл. дробно-рацион. ф-цией от пар-ра p. (ai и bj – числа веществ. и постоянны для стацион. системы)
2) В реал. физич. сист-х, как правило, n≥m, т.е. порядок знам-ля выше, чем порядок числителя. Случай n<m возм-но только для отдел. элем-ов сист-мы.
3) ПФ имеет «нули». Это зн-ия p, обращающие в нуль числитель, т.е. это корни ур-ия Mm(p)=0 =>p1, p2,…, pm
4) ПФ имеет «полюсы». Это зн-ия p, обращающие в нуль знамн-ль, т.е. корни ур-ия Dn(p)=0, D–полином. p1, p2,…, pn
Нули и полюсы м/б как веществ., так и комплексными. Полюсы важнее для задач анализа и синтеза в ТАУ по 2 причинам:
1) они м/ означать резкое возрастание вых. пар-ра, а это есть неустойчивость САУ.
2) ур-ие м/ рассм. без прав. часть. В своб. дв-ии САУ (ДУ без прав. части) нули не имеют никакого значения.
Сложность ПФ, а именно макс. степень полинома, опред-ет сложность (порядок) САУ.
Частотные хар-ки сау и их взаимосвязь
Пусть есть передаточная ф-ия W(p), заменим в ней p на jw, где w – частота, j – мнимая единица. => W(jw)
соответствует амплитудно-фазово-частотной характеристике.
![]()
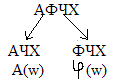
Справедливо для минимально-фазовых систем, это системы, которые среди прочих возможных имеют минимальную фазу.
![]() P=Acosφ
Q=Asinφ
P=Acosφ
Q=Asinφ
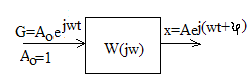
Линейные САУ – частота не изменяется, а сигнал остается такой же гармонический
![]()
![]()
lg(![]() L(w)=20lgA(w)
- логарифмическая АЧХ
L(w)=20lgA(w)
- логарифмическая АЧХ
Годограф: количественный способ построения годографа:
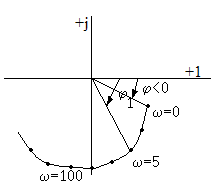
Качественный способ построения годографа:
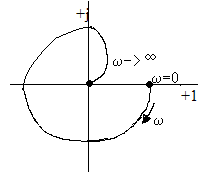
Если годограф уходи вниз, значит сигнал запаздывает.
Кол-во квадрантов, которые проходи годограф показывают сложность системы
Типовые входные воздействия и временные характеристики сау.
x(t)–опред-ся хар-кой системы и вх. сигналом
g(t)–типовые вх. сигналы:
1) единичная ступеньчатая ф-ция:
1(t)=g(t)=
![]()
![]()
2)
импульсн. дельта-ф-ция =
![]()
g(t)=
1`t
(t)
=
![]()
![]()
![]()
3) линейно возраст. ф-ция
![]()
4) равноускоренная
![]()
g(t)=k(t)+bt2
5)
гармонич. сигнал:
![]()
6) g(t)=arctg(kt)
- меняется
скорость изм-ия сигнала.
меняется
скорость изм-ия сигнала.
Хаар-ны для следящих систем (Пр. локационные)
Одна и та же САУ при разл. вх. сигналах имеет разл. вых. сигналы:
1)
![]() –
переходня
ф-ция
–
переходня
ф-ция
2)
![]() –
весовая
ф-ция
–
весовая
ф-ция
Гармонич. вх. сигнал имеет особую важность для анализа САУ по 2 причинам:
1) такой вх. сигнал однозначно обеспеч-ет гармонич. сигнал на выходе с идентичной частотой. Меняется только амплитуда и фаза
2) вх. сигнал любой формы представим в виде суммы гармонич. составляющих. Исп-зуя преобр-ие Фурье, мы получим гармонич. ряд, где состав-ие имеют кратную частоту.
При этом САУ отвечает принципу суперпозиции, т.е. вых сигнал от некот. суммы вх. сигналов в точности равен сумме вых. сигналов от каждой из вх. составляющих.