

Принципы построения дискретных и цифровых сау. Дискретизация и квантование непрерывного сигнала.
Цифровая САУ – такая динамическая система, которая содержит хотя бы 1 цифровой элемень.
Цифровая САУ относится к классу дискретных систем и в них происходит дискретизация сигнала. Если число уровней квантования по уровню сигнала невелико, то система будет относиться к нелинейной.
При очень большом числе уровней система аналогична непрерывной.
Самая большая особенность цифровых САУ связана с дискретизацией по времени и именно этот факт обуславливает все остальные особенности.
В качестве цифровых звеньев используется либо цифровые выч. машины (ЦВМ), либо отдельные цифровые устройства (ЦУ – сумматоры, перемножители).
ЦСАУ должна содержать хотя бы 1 цифро-аналоговый преобразователь (ЦАП) и 1 аналого-цифровой преобразователь (АЦП).
Типовые звенья:
Разомкнутая СУ
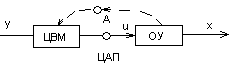
косвенная связь, u – сигнал управления
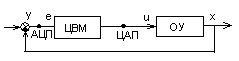
Замкнутая СУ
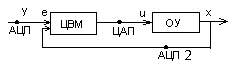
3.
Сравнение и вычитание в цифровом коде выполняется точнее и быстрее.
3 сочетает в себе 1 и 2 потому что в 1 нужна сложная прогр., а во 2й есть обратная связь.
Особенностью ЦСАУ, отличающей её от нелинейных явл. то, что система ведет себя цифровым или псевдоцифровым индексом.
Сигнал сущ. постоянно и не сглаживается (как в нелинейных САУ)
Для анализа ЦСАУ используется отдельный мат. аппарат, теория решетчатых ф-ций.
В природе все сигналы безусловно аналоговые.
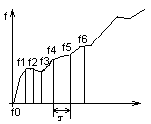
Дискретизация – фиксация отсчетов сигнала в отдельные моменты времени (f0, f1, f2,…)
Чаще всего эти моменты времени на оси равноотстоят друг от друга => сущ. период дискретизации.
f[nτ], n=0,1,2… є N
f[nτ]=f(t)׀t=nτ
Период димкретизации в одной и той же САУ постоянный
τ = const => f[n]
![]()
означает ненормированный дельта-импульса
![]()
означает нормированный дельта-импульса.
δ(t)=∞, если t=0 или 0, если t≠0
![]()
δ*(t)=1, если t=0 или 0, если t≠0 – (ненормированное δ-импульса)
![]()
δ(t) – набор един. импульсов
![]()
![]() -
z преобразование
-
z преобразование
![]()
F(p)→F*(p)→F(z)
Если так то любой сигнал может быть преобразован в аналоговый и для каждого из них можно найти z-образ:
g(t)→g(n)→G(z)
x(t)→x(n)→X(z)
Дискретное преобразование Лапласа и z-преобразование. Получение z-передаточной функции цифровой сау.
Преобразование Лапласа и z-преобразование вычислить z-образн. и z-предаточную ф-цию, которая аналогична комплексной ф-ции W(jω).
![]()
![]()
![]()
 на
выходе
на
выходе
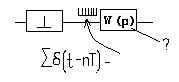
Алгоритм перехода
![]()
Для того чтобы выбрать время T, нужно применить теорему Котельникова.
Частота дискретизации непрерывного сигнала должна не менее чем в 2 раза превышать макс. частоту, содержащуюся в спектре исходного сигнала.

Выбор частоты дискретизации:
1. Исходя из max частоты пропускания самого высокочастотного и звеньев.
Сложность передат. ф-ции напрямую осу