

Сущность метода гармонического баланса (применительно к нелинейной сау).
Метод является наиболее развитым, ёмким и эффект.
Основан на next представлении: (как в методе Попова). Разбиение нелин. САУ на лин. часть, и НЭ и объединение этих частей «кольцевой связью».

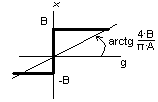
Пусть g – синусоидн. сигнал.

g = Asinwt; x=F(g)
![]()
![]()
1) A1>A2>A3>……
B1>B2>B3>……
2) Все лин. части, по сути, явл. фильтрами низких частот.
В I приближении считается, что на вых. ЛЧ будет только 1 гармоника – первая.
![]()
- приближ. преобразование.

![]()
а и b – пост. величины, для опред. нелин. элемента, они могут вычислены по формулам интегралов or взяты из таблицы.
Для однозначных
нелинейностей коэфф. b=B1![]() 0
0
Для неоднозн. – b< >0(b<0)
Гармоническая линеаризация для однозн. эл-та:
![]()
Метод гармонич. баланса ещё наз. методом гармонической линеаризации.
![]()
J(A) – компл. амплитуд. хар-ка
Итак, линейная часть САУ описывается компл. функцией W(jw), нелин. эл-т J(A), A – амплитуда сигнала.
J(A)=a(A)+jb(A)
I )
)
![]()
II)

![]()
I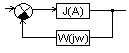 II)
II)
![]()
Д(jw,A)=0 (знаменатель)
1+W(jw) J(A)=0 – уравнение устойчивости системы.
Анализ динамической устойчивости сау методом гармонического баланса.
![]()
В этом случае будет динамически устойч. система, т.е. войдёт в автоколебательный режим.
Изобразим это графически:

A:
0…![]()
Z(A)= -1/J(A)
a) if годографы не пересекаются => решений ур-ния нет => автоколебаний нет.
б) if годографы пересекаются, then т. пересечения опред. частоту колебаний и конкретн. амплитуду, т.е. пар-ры (режим) автоколебаний.
в) Годографы пересекаются дважды (либо несколько).
(W1,A1) (W2,A2)
Устойчивость автоколеб.:

(W1,A1) (W2,A2)
If двигаясь по годографу z в направлении inc A, из т. автоколебаний. мы попадаем «внутрь» годографа W, то автоколебания будут неустойчивыми.
If же inc амплитуды в т. пересечения приводит к выходу за пределы охвата годографа W, then автоколебания должны быть устойчивы.
=> if режимов автоколебания >1 (>2 и >), then они должны чередоваться
If сис-ма диссипативная (годограф скручивается), то здесь мы можем многократно входить в него.
Неоднозначные элементы:
![]()
If разделить 1 на число > 0, then должно получаться также число >0.
Последовательность метода:
1. Группирование лин. эл-тов с вычисл. общей передат. ф-ций.
W(jw).
2. if нелин. эл-тов несколько, то объед. их в 1. Для этого можно составить большую сис-му ур-ний. Вычисление a(A) и b(A) по формулам интегрирования из таблиц.
3. Построение годографа W(jw) на компл. плоскости.
4. Построение на той же плоскости годографа z=-1/J(A)
5. Анализ взаимного расположения двух годографов:
a) есть пересечение or нет (if not, then analyze заканчивается)
б) Определение т. пересечения и режимов автоколебаний (W из годографа W(jw), A из годографа z)
в) Определение устойчивости выявленных режимов по правилу «вх. or вых. из годографа W, двигаясь по z при возрастании A».