

Наз-ние, состав и стр-ра САУ.
Прост-ая стр-ная схема разомкн.сис-мы:
![]()
вх выход
g у
из![]()
f(t) – возмущающее воздействие
Объект упр-ния м/б природный или техн. объект (простое техн. устр-во или техн. комплекс).
Основной принцип автоматиз-ого упр-ния – в каждый момент t анализ-ся y(t) и срав-ся с требуемым знач. И на основании сравнения делается вывод о режиме дальнейшего упр-ния.
Основная задача – поддерживать y(t) или достичь его.
Min элементы-система регулир-ия.

![]()


 u1
y1
u1
y1
u2
y2
![]()
![]()
us ym
g1 g2 gk
![]()
Часть пар-ов измеряется, часть не измеряется
у - подмножество х
n![]() m
m
Если n=m, то объект- полностью наблюдаемый.
![]() ,
х- выходные сигналы.
,
х- выходные сигналы.
![]() -управляющие
воздействия (сигналы управление).
-управляющие
воздействия (сигналы управление).
- управляемые внеш. возд-ие (контролируемые внеш. возд-ия).
![]() -
внешние неконтролируемые возд-ия
(помехи; изменения нагрузки на объект).
-
внешние неконтролируемые возд-ия
(помехи; изменения нагрузки на объект).
Если
кол-во управляющих коордикат вектора
достаточно,
чтобы задать любое состояние вектора
![]() (из возможных), то объект наз. полностью
управляемым.
(из возможных), то объект наз. полностью
управляемым.
![]()

![]()
Простые ОУ имеют 1 координату: m=n=S=1
Такой ОУ наз. одноконтурныем. Если координат больше, то это многоконтурный ОУ.
ОУ: 1. устойчивые-тот, в кот-ом после прекращения кратковременно возд-ие на него с теч. времени возвращается стабил. исход. состояние, сущ-ие доо возд-ие (или близкое к нему).
неустойчивый – процесс, инициированный вход. возд-ием, продолж-ся, усиливается, развивается.
Если возвращения в исход. состояние нет, а процесс фиксируется, то объект наз. безразличным.
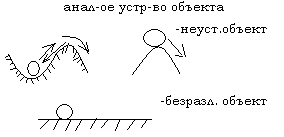
Объекты, потенциально устойчивые, наз. объектами с самовырав-ие. Неустойч. объекты- без самовырав-ие.
Сигналы в системах автоматического управления.
Описать
или задать СУ-это означает установить
взаимосвязь м/у
и
![]()
![]()
можно определить:
статически ф-ия (табл., формулы, описыв. стабил. состояние
 и у)
и у)динамическое описание:
а) если вх. возд-ие явл-ся гармонич. сигналами, то тоже будет гармонич. сигналом и тогда ф-ия м/б без пар-ов времени(амплитуда, частота, фаза). Такое возможно только для лин. СУ.
б)
приходится выполнять временное описание,
тогда
![]()
Справедливо и для лин., и для нелин. СУ.

![]()

![]()
скорость изм-ия вых. пар-ов
Описание системы в дифф. Ур-иях в нормальной форме Коши. Если Ур-ие лин. либо с помощью аппроксимаций сводится к ним, то ОУ явл-ся лин. В противном случае ОУ- нлин. Вся нелин САУ приводит к более сложному синтезу и анализу. В реальности все объекты-нелинейны.
Основные принципы управления и требования к сау.
СУ м/ построена лишь для управл-ого и наблюд-ого объекта
САУ д/б устойчивой даже в случае неуст-ого ОУ
В системах д/б реализован 1 или неск. принципов управления:
разомкн-ое упр-ие; В этом случае вх. сигналы передаются только «слева -направо», а текущее состояние
 никак
не влияет на алгоритм управления
(вектор g
и u).
никак
не влияет на алгоритм управления
(вектор g
и u).замкн-ое управление; Сущ. обратная связь м/у объектами и устр-вами упр-ния. Состояние объекта учитыв-ся при выработке возд-ия (в алгоритме упр-ния).
комбинированное упр-ние.
Замкнутое упр-ние явл-ся базовым принципом. Разамкн- теоретическим (т.е. имеет меньшую точность; непригодно для неуст. САУ; применимо для неконтролир. ОУ)
Алгоритмы упр-ия:
стабилизация- поддержка заданного пар-ра объекта упр-ия в заданных приделах (САР)
прогр-ое упр-ние- вых. пар-р должен изм-ся по заданному закону
следящее упр-ие- узмерение к-л внешн. пар-ра и изм-ие состояния ОУ в соотв-ии с измеренным пар-ром
(пример: спец. техника военного времени).
адаптивное упр-ние- корректировка алгоритма упр-ния объекта не только в зависимости от цели, но и от др. внеш. уловий (самонастройка, самоорг-ция)
САУ- динамич. система позв-щая без участия чела поддерж. пар-ры ОУ в заданных пределах либо изменять их по заранее известн. или неизвестн. з-ну, использ. для этого инфу, получающую о состоянии объекта и внешн. среды, а также источники энергии. САУ- активная динам. система направленного типа.