

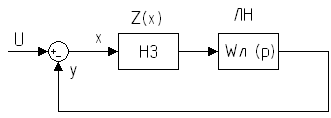
2. Общая характеристика метода гармонической линеаризации.
![]() -
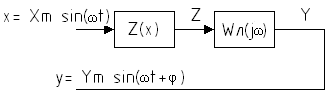
комплексный коэфф. усиления.
-
комплексный коэфф. усиления.
Суть линейного звена – отфильтровать все гармоники, кроме первой.
Метод гармонической линеаризации является мощным средством исследования нелинейных автоматических систем в смысле простоты и довольно большой универсальности его аппарата в применении к самым разнообразным нелинейностям. Однако надо иметь в виду, что он решает задачу приближенно.
Пусть дано какое-нибудь нелинейное выражение вида:
![]() (1)
(1)
![]()
![]() (2)
(2)
![]()
Разложив функцию правой части выражения (1) в ряд Фурье, получим:

 высшие
гармоники (4)
высшие
гармоники (4)
Предположим
![]() ,
(5)
,
(5)
что означает отсутствие постоянной составляющей в данном разложении.
![]()
![]()
![]() высшие
гармоники, (6)
высшие
гармоники, (6)
где q и q’ – коэффициенты гармонической линеаризации, определяемые формулами:
 (7)
(7)
Итак, нелинейное
выражение (1) при
![]() заменяется выражением (6), которое с
точностью до высших гармоник аналогично
линейному. Эта операция и называется
гармонической линеаризацией. Коэффициенты
q(a, w) и q’(a, w) постоянны при постоянных
значениях a и w, т.е. в случае периодического
процесса. В переходном колебательном
процессе с изменением а и w коэффициенты
q и q’ изменяются. Для разных амплитуд
и частот периодических процессов
коэффициенты выражения (6) будут различны
по величине.
заменяется выражением (6), которое с
точностью до высших гармоник аналогично
линейному. Эта операция и называется
гармонической линеаризацией. Коэффициенты
q(a, w) и q’(a, w) постоянны при постоянных
значениях a и w, т.е. в случае периодического
процесса. В переходном колебательном
процессе с изменением а и w коэффициенты
q и q’ изменяются. Для разных амплитуд
и частот периодических процессов
коэффициенты выражения (6) будут различны
по величине.
Данное обстоятельство и позволит путем применения к выражению (6) линейных методов исследования проанализировать основные свойства нелинейных систем, которые не могут быть обнаружены при обычной линеаризации.
В случаях, когда нелинейное звено описывается сложным уравнением, включающим сумму различных линейных и нелинейных выражений, каждый из нелинейных членов подвергается гармонической линеаризации по отдельности. Произведение же нелинейностей рассматривается обязательно в целом как одна сложная нелинейность.
3. Структура микропроцессорной системы.
Шинная структура связей
Упорядоченная группа линий связи, по которым передаются сигналы или коды называется шиной (англ. bus).
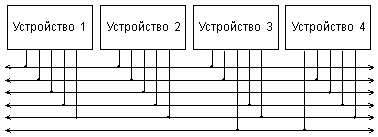
Все сигналы между устройствами передаются по одним и тем же линиям связи, но в разное время (это называется мультиплексированной передачей).
Типовая структура микропроцессорной системы
Все устройства микропроцессорной системы объединяются общей системной шиной (она же называется еще системной магистралью или каналом).
Шина адреса – служит для определения адреса (номера устройства) с которым микропроцессор обменивается в данный момент времени. ША всегда однонаправлена от микропроцессора к устройству. Источником адреса практически всегда является микропроцессор. Разрядность ША определяет количество возможных устройств подключённых к микропроцессору.
Шина данных – используется для передачи информационных кодов между всеми устройствами микропроцессорной системы. ШД всегда двунаправлена. Разрядность ШД определяет производительность микропроцессора. Чем больше разрядов в ШД тем больший объём информации может быть обработан за один такт синхронизации.
Шина управления – состоит из отдельных управляющих сигналов, каждый из которых во время обмена информацией выполняет свою функцию. Сигналы на ШУ определяют тип текущего цикла обмена и фиксируют моменты времени, соответствующие разным частям или стадиям цикла, а так же обеспечивают согласование работы процессора с работой памяти и устройств ввода/вывода, обслуживают запросы и предоставление прерываний, запросы и предоставление прямого доступа к памяти. Линии ШУ могут быть как одно так и двунаправленными.
Шина питания – служит для подвода питающих напряжений к отдельным элементам системы. Состоит из линий питания и общего провода. Может объединять несколько источников питания.
<23>