

Резонансные уровнемеры.
 Принцип
основан на зависимости собственной
частоты колебаний отрезка длинной
линии, выполняющего роль колебательного
контура в автогенераторе. от степени
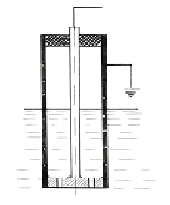
погружения его в жидкость. Чувствительный
элемент выполнен в виде тонкостенной
металлической трубы с отверстиями и
соосно расположенного в трубе стержня.
Когда чувствительный элемент погружен
в жидкость. Она его шунтирует, уменьшая
длину колебательного контура, что
приводит к повышению частоты колебаний.
Чувствительный элемент включен в схему
автогенератора и является частотозадающим
элементом.
Принцип
основан на зависимости собственной
частоты колебаний отрезка длинной
линии, выполняющего роль колебательного
контура в автогенераторе. от степени
погружения его в жидкость. Чувствительный
элемент выполнен в виде тонкостенной
металлической трубы с отверстиями и
соосно расположенного в трубе стержня.
Когда чувствительный элемент погружен
в жидкость. Она его шунтирует, уменьшая
длину колебательного контура, что
приводит к повышению частоты колебаний.
Чувствительный элемент включен в схему
автогенератора и является частотозадающим
элементом.
Измер. Преобр.
Авто Генерат.
f


Резонансный уровнемер работает при возбуждении на высоких частотах, уровень жидкости, уменьшая длину преобразователя (длину колебательного контура) уменьшает длину волны (электромагнитной). В отрезке преобразователя должно укладываться целое число полуволн. При изменение длины волны изменяется частота колебаний Автогенератора (А.Г.).
Если f
= 50 Гц
Если f
= 300 МГц
Синтез следящей системы с астатизмом 1-го порядка.
Типовые л. а. х. систем с астатизмом первого порядка. Следящие системы с
астатизмом первого порядка представляют собой наиболее распространенный тип
систем, содержащих одно интегрирующее звено — исполнительный двигатель.
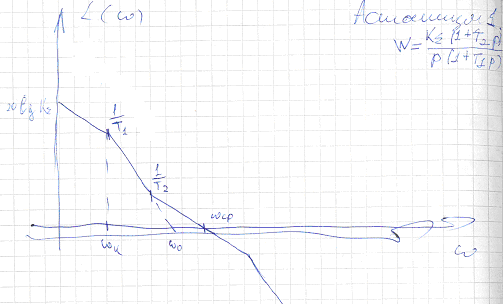
желаемая ЛАЧХ
![]()
![]()
![]()
![]()
![]()
![]()
![]() -
базовая частота
-
базовая частота
![]() -
максимальное ускорение
-
максимальное ускорение
![]()
![]() -
частота среза
-
частота среза
![]() -
максимальная ошибка
-
максимальная ошибка
![]()
![]() -
максимальная скорость
-
максимальная скорость![]() М-
показатель колебательности
М-
показатель колебательности
![]()
На малых частотах псевдо частота λ совпадает с обычной частотой ω (до частоты среза). После частоты среза λ=2/Т*tg(ω*T/2).
Прикладные подсистемы сапр.
Которые обеспечивают проектирование конкретных объектов (автомобиль, электронная схема). Классификация подсистем (в зависимости от степени усвоения): легкие САПР – решают небольшое кол-во легких задач, средние – решают сложные задачи проектированиях (синтез системы, статика, динамика, временной и частотный анализ. мат-кад, авто-кад), тяжелые – решается комплекс задач на каждом уровне, объединенных между собой единой информационной базой.
Подсистемы САПР проектирующих подсистем.
- подсистема проектирования деталей и сборочных единиц,
- подсистема проектирования топологии БИС ,
- подсистема технологического проектирования.
Примеры обслуживающих подсистем:
- подсистема графического отображения объектов проектирования,
- подсистема документирования,
- подсистема информационного поиска.
В зависимости от отношения к объекту проектирования проектирующие подсистемы делят на:
- объектно-ориентированные,- объектно-независимые.
В Выделяют подсистемы проектирующие и обслуживающие. Проектирующие подсистемы выполняют проектные процедуры и операции. Обслуживающие подсистемы предназначены для поддержания работоспособности объектно-ориентированных подсистемах выполняются процедуры и операции, непосредственно связанные с конкретным типом объектов проектирования; в объектно-независимых - унифицированные процедуры и операции.
<17>