

XXX
<1>
Ионизационные камеры.
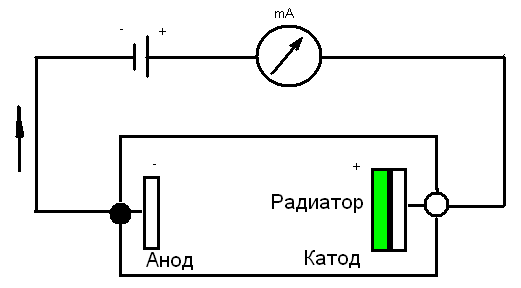
ИК представляет собой герметичный сосуд с двумя электродами заполненный газом, к электродам подводится постоянное напряжение 100,200,500В.
Принципиальная особенность работы ИК.
1)Тепловые нейтроны не могут вызывать ионизацию газа, поэтому нейтроны могут быть зарегистрированы только в результате ядерной реакции, которую они вызывают, а ядерная реакция сопровождается выделение заряженных частиц, которые вызывают ионизацию газа. Для этого на один или оба электрода наносится спец. вещество- РАДИАТОР. В качестве радиатора применяют аморфный бор или U235.
2) Нейтронное излучение в ЯР всегда сопровождается γ излучением, в ИК появляется электрический ток создаваемый им, который вносит погрешность в измерение нейтронного потока, для избавления от погрешности γ излучения применяется скомпенсированные ИК.
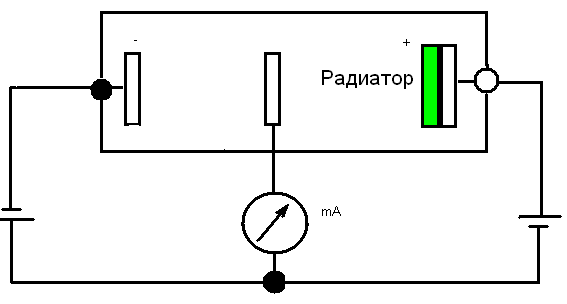
КНК- состоит из двух ИК. В одной из которых есть РАДИАТОР в другой нет. Электроды ИК включены по дифференциальной схеме (токи вычитаются). В ИК с радиатором ток возникает за счёт нейтронов и γ излучения, а в ИК без радиатоа только за счёт γ излучения.
3) ВАХ ИК.
1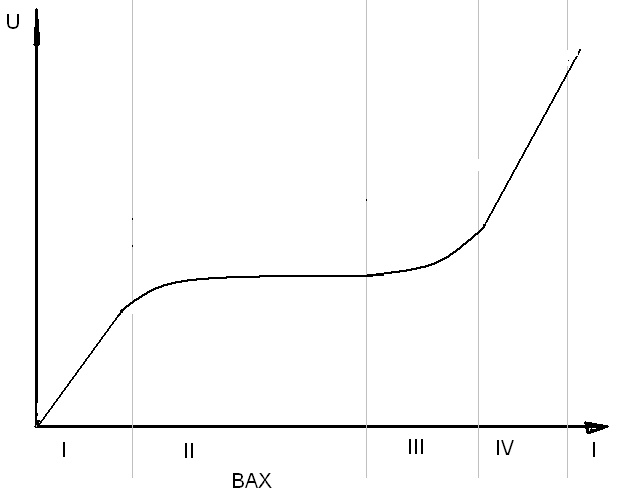 )
Рекомбинация ионов газа поэтому ток
увеличивается с увеличением напряжения.
)
Рекомбинация ионов газа поэтому ток
увеличивается с увеличением напряжения.
2) Напряжение достигает такой величины что все образовавшиеся ионы достигают электродов.
3) Напряжение достигает такой величины, что ионы газа ускоряются за счёт напряжения и сами ионизируют газ т.е. происходит дополнительная ионизация
( область газового усиления.
4) Напряжение достигает такой величины, что даже от одной заряженной частицы происходит лавинообразная ионизация газа.
На АЭС ИК устанавливают на специальных подвесах за пределами ЯР. В ВВЭРе они установлены между корпусом и биологической защитой, а в РБМК между отражателем и биологической защитой. Это обусловлено:
ИК установленная вне реактора регистрирует нейтроны утечки, а плотность нейтронов утечки пропорциональна тепловой мощности.
Вне реактора плотность нейтронов меньше поэтому увеличивается срок службы РАДИАТОРА.
Нет ограничений по размерам.
Особенности цифрового управления процессами.
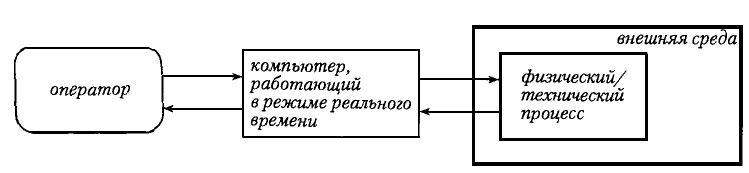
Цифровая система управления физическим/техническим процессом
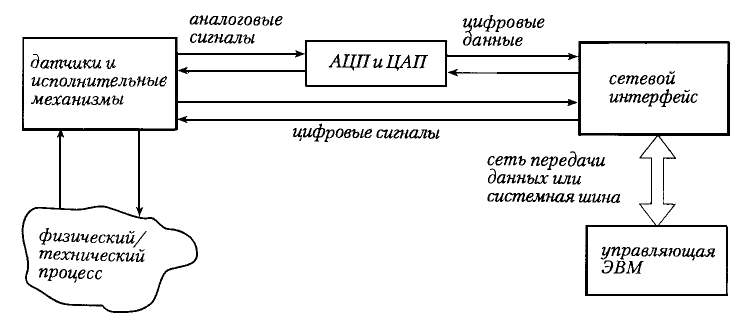
Система цифрового управления физическим/техническим процессом состоит из следующих компонентов:
Управляющая ЭВМ;
Каналы обмена информацией;
Аналого-цифровые и цифро-аналоговые преобразователи (АЦП и ЦАП);
Датчики и исполнительные механизмы;
Собственно физический/технический процесс.
Физический процесс контролируется с помощью датчиков,
ДАТЧИКИ − это устройства, преобразующие физические параметры процесса (температуру, давление или координаты) в электрическую величину, которую можно непосредственно измерить (сопротивление, ток или разность потенциалов).
Цифровые системы управления работают только с информацией, представленной в цифровой форме, поэтому полученные в результате измерений электрические аналоговые величины необходимо предварительно обработать с помощью АЦП.
Исполнительные механизмы осуществляют непосредственное влияние на процесс.
ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ − преобразуют электрические сигналы в физические воздействия, главным образом движение − перемещение и вращение, которые можно использовать для других целей,
Информация от удаленных объектов поступает к управляющему компьютеру через каналы связи
УПРАВЛЯЮЩИЙ КОМПЬЮТЕР
Интерпретирует все поступающие от физического процесса данные;
Принимает решения в соответствии с алгоритмами программ обработки;
Посылает управляющие сигналы;
Обменивается информацией с человеком-оператором и/или другими ЭВМ и реагирует на его/их команды.
Особенности цифрового управления процессами
Отличие управляющего компьютера от обычного
Управление процессами всегда происходит в реальном времени
Принципиально другой подход к программированию. Параллельное исполнение алгоритма обработки информации вместо последовательного.
Управляющий компьютер должен работать со скоростью, соответствующей скорости процесса. Само понятие "реальное время" указывает на то. что в реакции компьютерной системы на внешние события не должно быть заметного запаздывания. Это накладывает серьёзные требования на эффективность использования ресурсов компьютерной системы с учетом временные ограничений.
Ход исполнения программы нельзя определить заранее. Внешние сигналы могут прерывать или изменять последовательность исполнения операторов программы, причем для каждого нового прогона по-разному.
Особая специфика тестирования систем реального времени ввиду отсутствия предсказуемого порядка выполнения операторов программы по сравнению с обычными компьютерными системами.
Свойства процессов, усложняющие управление
Уровень сложности системы управления определяется, в первую очередь, свойствами управляемого процесса
Факторы усложняющих управление :
нелинейность процесса;
изменяющаяся внешняя среда;
изменение условий самого процесса;
значительные временные задержки;
внутренние связи процесса.
Практически все физические процессы по своей природе НЕЛИНЕЙНЫ
Линейные соотношения в большинстве случаев фактически представляют собой искусственное упрощение реального положения вещей
Запаздывание сигналов или наличие зон нечувствительности (мертвых зон) представляет собой серьезную проблему для управления. Из-за этого регулятор функционирует на основе устаревших данных, вплоть до того, что он может выдавать ложные команд.
Запаздывания всегда присутствуют в тех процессах, где некоторые параметры нельзя измерить непосредственно.
Многие типы датчиков характеризуются некоторым временем, необходимым для получения нового значения, измеряемой величины.