

2. Типовые нелинейности сау.
Линейных систем в природе не существует, так как характеристики реальных устройств нелинейные и некоторые из них не могут быть линеаризованы, например, характеристика логического элемента. Кроме того, есть системы, например релейные, адаптивные, в которых принципиально необходимо учитывать нелинейности.
Нелинейной системой называется такая система, в состав которой входит хотя бы одно звено, описываемое нелинейным уравнением. Такое звено называется нелинейным звеном или нелинейным элементом.
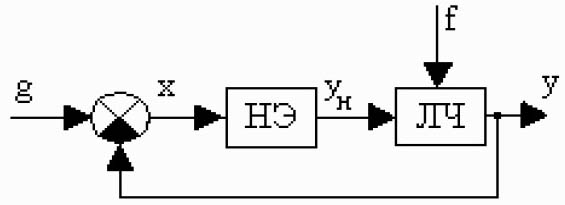
Путём эквивалентного преобразования структурных схем и нелинейных звеньев большое число нелинейных систем можно представить в виде замкнутого контура с последовательным включением нелинейного элемента (НЭ) и линейной части (ЛЧ), как показано на рисунке.
Классификация нелинейных элементов и систем
Нелинейные звенья классифицируются по различным признакам. Наибольшее распространение получила классификация по статическим и динамическим характеристикам, так как в системе чаще всего нелинейности приходится учитывать в виде характеристик. Эти характеристики могут быть как однозначными, так и двузначными (петлевыми), симметричными и несимметричными относительно начала координат.
Различают следующие типы нелинейных звеньев.
Нелинейные звенья с гладкими криволинейными характеристиками. Примеры таких характеристик приведены на рисунке
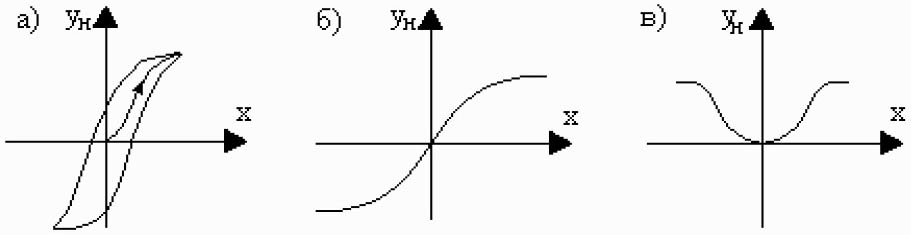
а – гистерезисная. б,в – усилительные.
На рисунке а изображена двухзначная гистерезисная (запаздывающая) характеристика. Характеристика б отображает насыщение или ограничение и соответствует реальному амплитудному усилителю, а характеристика в – реальному усилителю мощности. Характеристики а и б – нечётно-симметричные, а характеристика в – чётно симметричная.
Нелинейные звенья с кусочно-линейными характеристиками.
Некоторые из таких характеристик представлены на рисунке.
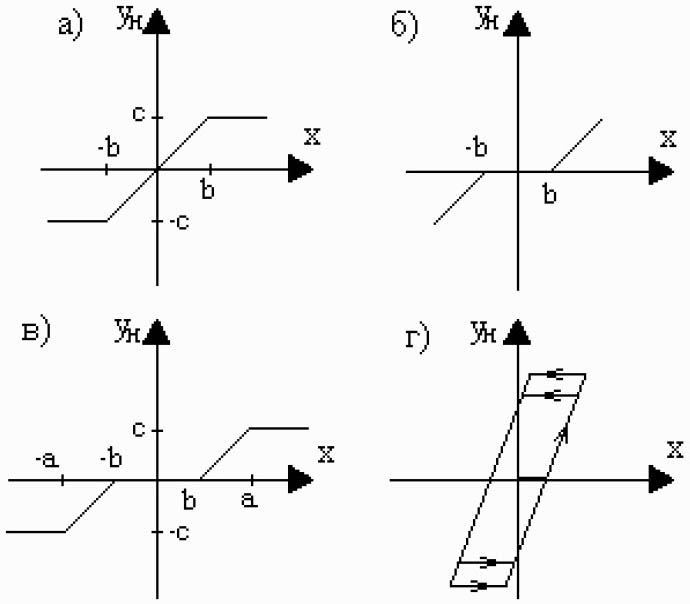
Характеристика а отображает насыщение, характеристика б – зону нечувствительности, а характеристика в соответствует звену, обладающему одновременно зоной нечувствительности и насыщением. Характеристика г позволяет учесть люфт или зазор кинематической передачи.
Релейные звенья – это элементы, которые на своём выходе выдают конечное число фиксированных значений. Три наиболее типовые релейные характеристики:
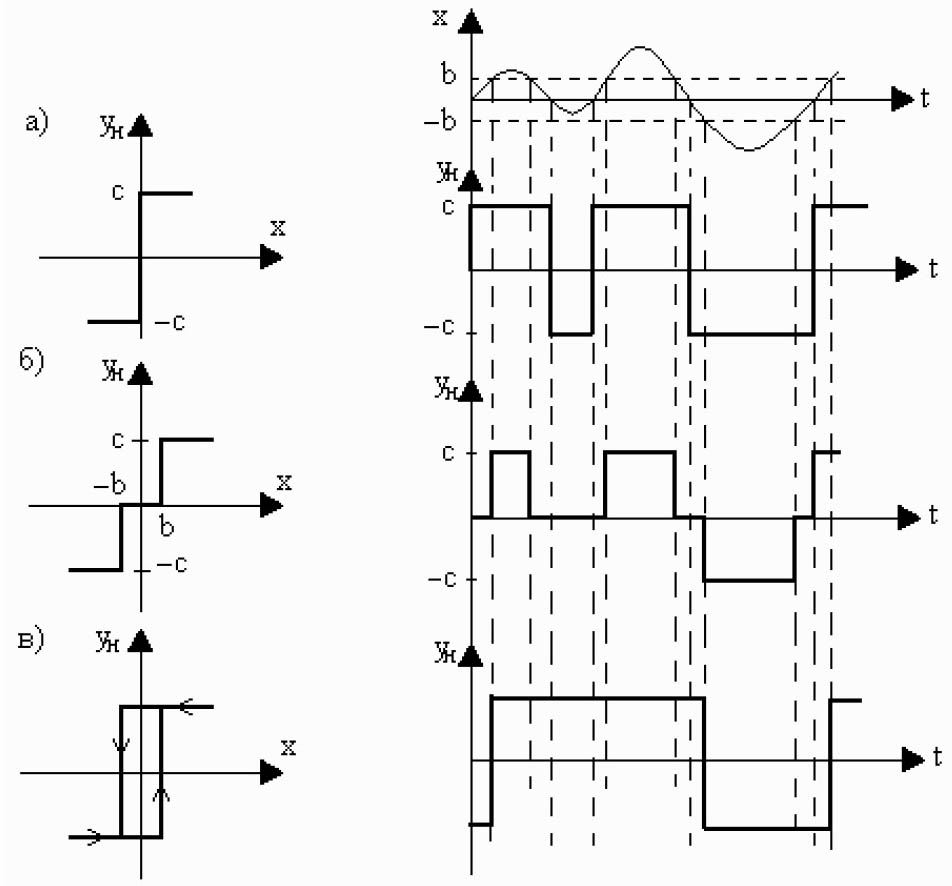
А – идеальное двухпозиционное реле
Б – трёхпозиционному реле с зоной нечувствительности
В – Двухпозиционному поляризованному реле.
Кроме того на рисунке показано прохождение непрерывного сигнала через соответствующие типы реле. Откуда следует, что коэффиуиент передачи реле зависит от величины входного воздействия.
Задачи и средства схемотехнического моделирования электронных устройств.
Модель – система-заместитель системы-оригинала, обеспечивающая изучение некоторых свойств оригинала.
Моделирование – представление системы моделью для получения информации об этой системе путем проведения экспериментов с ее моделью.
Физические модели – модели эквивалентны или подобны оригиналу, либо процесс функционирования такой же, как у оригинала
Математические модели – формализованное описание системы с помощью математических соотношений или абстрактного языка, отражающее процесс функционирования системы.
Использование результатов моделирования
Результаты моделирования используются для:
принятия решения о работоспособности системы
выбора лучшего проектного варианта
оптимизации системы
<21>