

Ультразвуковые уровнемеры.
Делятся на 3 группы:
1.Принцип ультразвуковой локации (и уровнемер и сигнализатор).
Строятся уровнемер двух модификаций, на прохождение ультразвука по жидкости (устанавливается на дне). Недостаток: Толька для контроля уровня чистой жидкости, если жидкость содержит твердые, газообразные частицы, то ультразвук рассеивается и гасится.
Чаще всего применяют с ультразвуковой локации по воздуху (над уровнем жидкости).Недостаток: ограниченный диапазон измерения (до 5 метров) т.к. ультразвуковыеколебания в воздухе рассеиваются (воздух изолятор).

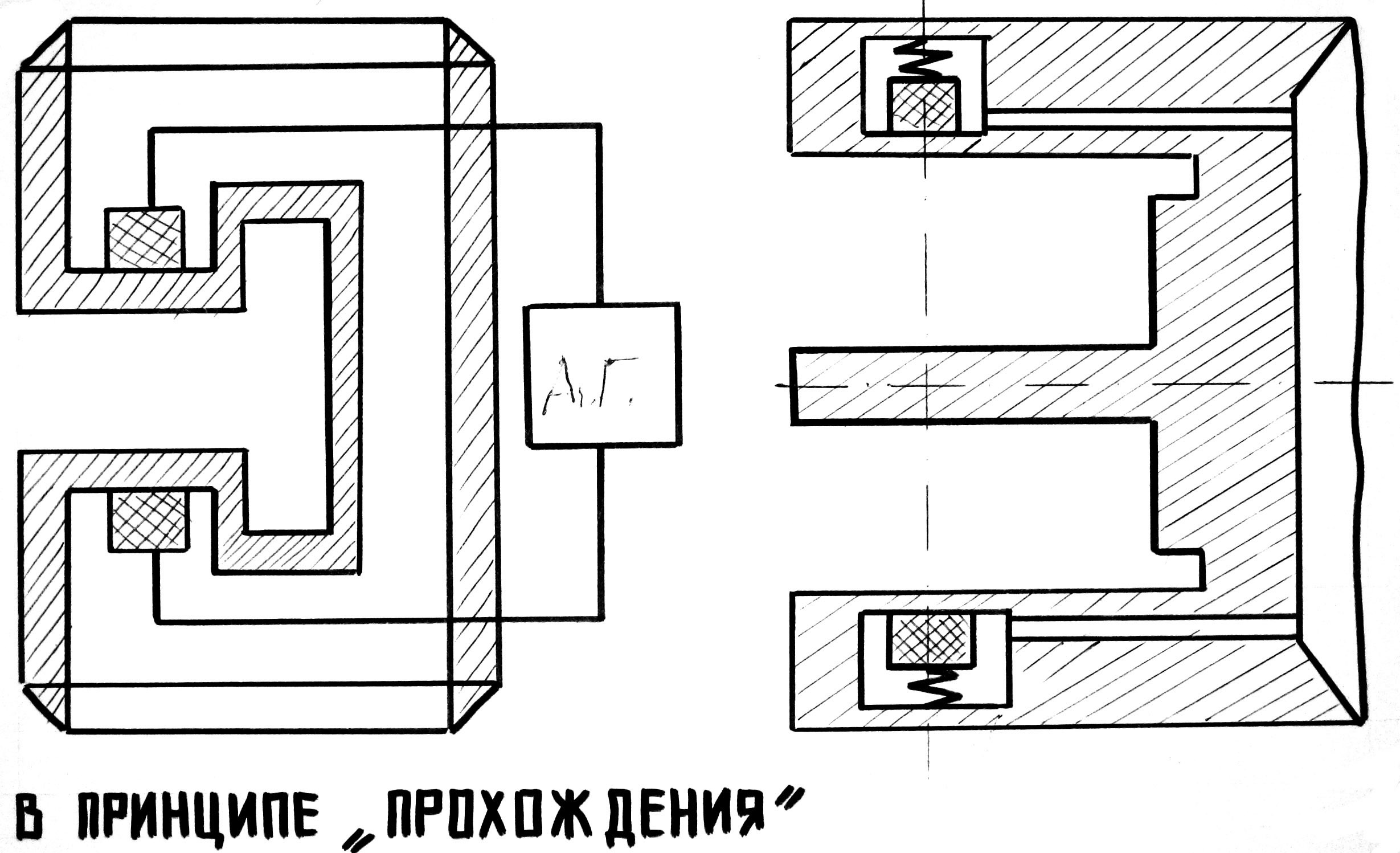
2. Сигнализация уровня на принципе «прохождения».
Цельносварная конструкция с сигнальным зазором между излучателем и приемником. Излучатель и приемник включены в схему автогенератора по кольцевой схеме (чаще всего), (один на вход другой на выход).
Недостаток: наличие ложных срабатываний при появление в жидкости пузырьков воздуха.
Для повышения надежности в сигнальный зазор помещают специальный волновод пластину в которую укладывают целое число полуволн.
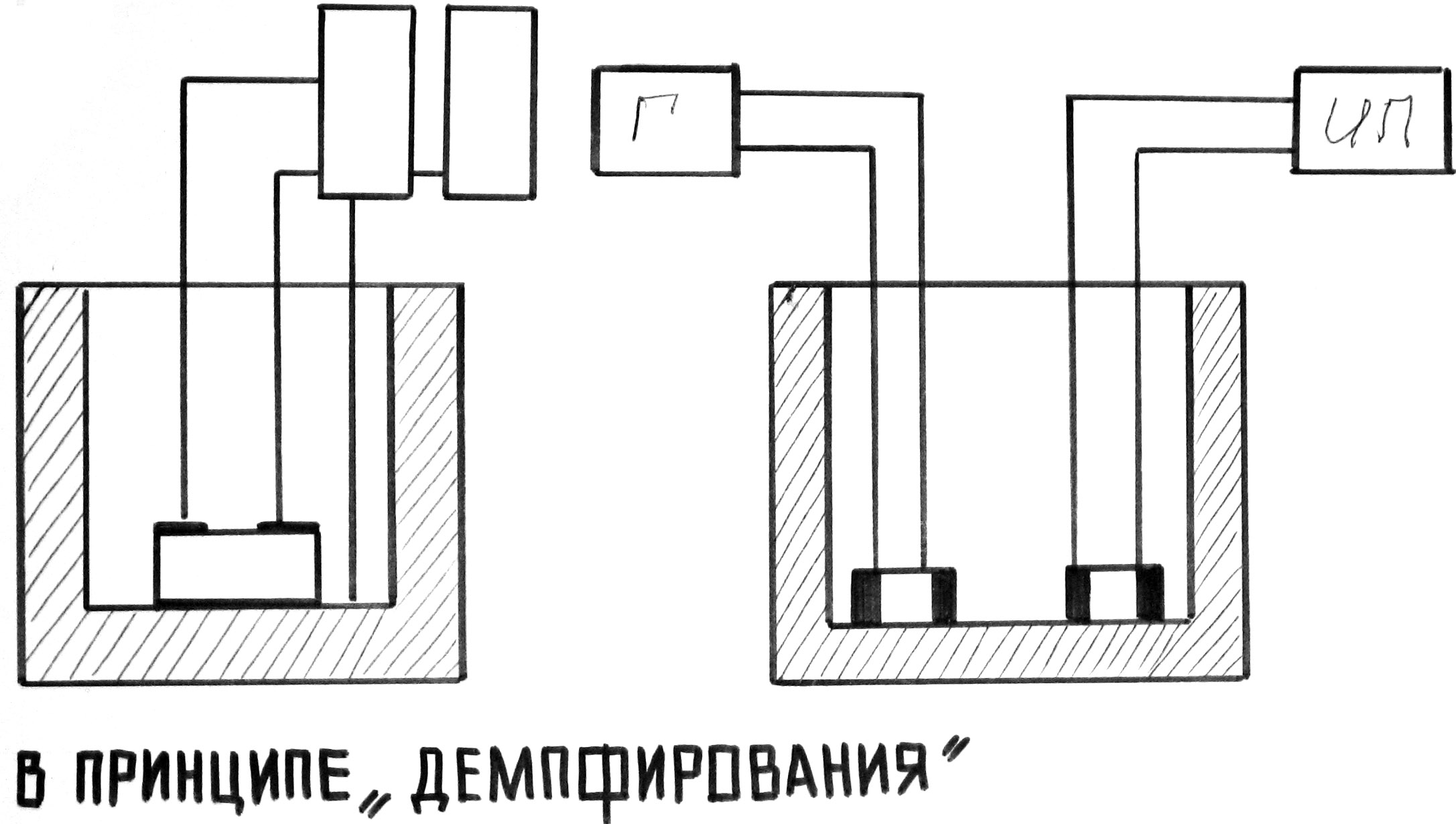
3. Сигнализатор уровня на принципе демпфирования.
Выполнен на основе пьезоэлектрического преобразователя с изменяющемся импедансом акустической среды (R=ρ/c).
Акустическая среда контролируемая жидкость(наличие, отсутствие). Простейшие ультразвуковые сигнализаторы, выполнены в виде трубы с заваренным рабочим концом, к внутренней стороне торца приклеен пьеза элемент (пьезоэлектрический трансформатор). Когда торец трубопровода находится в воздухе, пьезотрансформатор имеет высокую добротность, при этом происходят колебания автогенератора в частотозадающую цепь которого включен пьезотрансформатор. При касание торца трубы жидкости происходит переход энергии ультразвуковых колебаний в жидкость т.е происходит демпфирование ультразвукового преобразователя, амплитуда его колебаний резко снижается, при этом срываются колебания автогенератора, при отсутствие контакта с жидкостью автогенератор снова продолжает колебаться.
2-ой вариант: сигнализатор содержит два пьезоэлемента приклеенных к внутренней поверхности торца, один из них подключен к генератору колебаний, другой измерительному преобразователю. При контакте торца с жидкостью происходит демпфирование колебаний и резкое уменьшение выходного сигнала
Синтез следящей системы с астатизмом 2-го порядка.
В системах с астатизмом второго порядка обычно имеются два интегрирующих звена. Такими звеньями могут быть исполнительный и вспомогательный вигатели, например гидромуфта и управляющий двигатель, поворачивающий шпиндель или чашу гидронасоса.
![]()
![]()
![]()
- базовая частота - максимальное ускорение - частота среза - максимальная ошибка
- максимальная скорость М- показатель колебательности
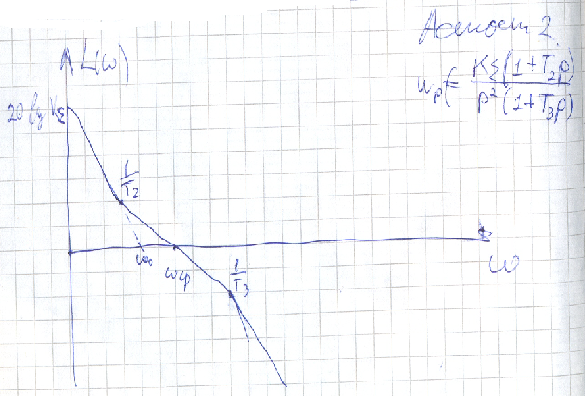
желаемая ЛАЧХ.
На малых частотах псевдо частота λ совпадает с обычной частотой ω (до частоты среза). После частоты среза λ=2/Т*tg(ω*T/2).
Обеспечивающие подсистемы сапр.
Обеспечивающие подсистемы САПР. Тех обеспечение (ввод, вывод, обработка), программное (общесистемное – операционная система), информационное (вне машинное, внутри машинное – базы данных), математическое (мат модели и алгоритмы решения задач), методическое (правила проектирования, стандарты, госты), организационное (объединение проектировщиков).
Виды обеспечения САПР:
В САПР выделяют следующие виды обеспечения:
- методическое,
- математическое,
- программное,
- техническое,
- лингвистическое,
- информационное,
- организационное.
Методическое обеспечение - документы , в которых определены состав, правила отбора и эксплуатации средств автоматизации проектирования. Математическое обеспечение - совокупность математических методов и моделей, необходимых для выполнения процесса автоматизированного проектирования.
Программное обеспечение - совокупность программ, представленных в заданной форме, вместе с программной документацией.
Техническое обеспечение - совокупность взаимосвязанных и взаимодействующих технических средств для ввода, хранения, переработки, передачи программ и данных, организации общения оператора с ЭВМ , изготовления проектной документации.
Информационное обеспечение - совокупность представленных в заданной форме сведений, необходимых для выполнения автоматизированного проектирования, в том числе описания стандартных проектных процедур, типовых проектных решений, типовых элементов, комплектующих изделий, материалов и др.
Организационное обеспечение - совокупность документов, определяющих состав проектной организации и ее подразделений, их функции, связи между ними и комплексом средств автоматизации.
<18>