

5.6 Сенсори струму і напруги на основі ефекта Холла
Сенсори
прямого підсилення використовують
ефект Холла. Магнітна індукція
![]() і напруга Холла Ux,
формуються вимірюваним струмом
і напруга Холла Ux,
формуються вимірюваним струмом
![]() ,
який перетворюється у вихідний струм
сенсора. Струм управління
,
який перетворюється у вихідний струм
сенсора. Струм управління
![]() подається на сенсор від стабілізованого
джерела струму (рис.5.16).
подається на сенсор від стабілізованого
джерела струму (рис.5.16).
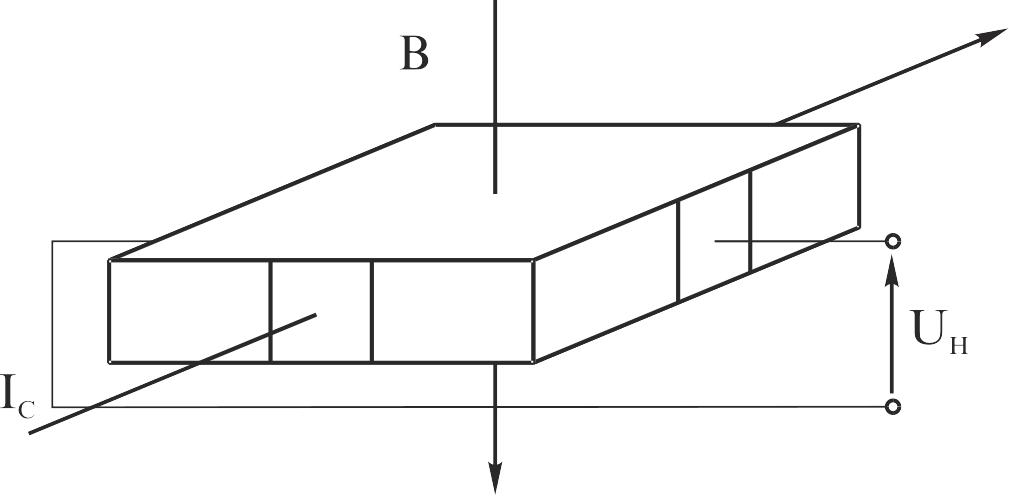
Рисунок 5.16
В межах лінійної області циклу гістерезису магнітна індукція пропорційна :
![]() ,
,
де а – постійна для даного сенсора.
Відповідно, напруга Холла визначається так:
![]() ,
,
де k – постійна Холла, d – товщина пластини.
В останньому рівнянні всі складові постійні за винятком вимірюваного струму . Тому рівняння перетворення для таких сенсорів є лінійним:
![]() ,
,
де
![]() - постійний коефіцієнт.
- постійний коефіцієнт.
Вихідний
сигнал сенсора
![]() підсилюється,
і на виході сенсора формується вихідна
напруга
підсилюється,
і на виході сенсора формується вихідна
напруга
![]() ,
,
яку за допомогою аналого-цифрового перетворювача перетворюють у двійковий код.
Сенсори прямого підсилення здатні вимірювати як постійний, так і змінний струм з гальванічною ізоляцією. Вони характеризуються низькою потужністю споживання, малими геометричними розмірами і відносно малою вагою. Вони забезпечують відсутність внутрішніх втрат у вимірювальному колі і нечутливі до механічних перевантажень, відносно дешеві і застосовується переважно в електроенергетиці.
Діапазон перетворюваного струму визначається лінійною ділянкою кривої намагнічення магнітного кола. В залежності від типу сенсора діапазон вимірювання може 3 рази перевищувати значення номінального струму.
Вихідна напруга прямо пропорційна вимірюваному струмові. Максимальне значення вихідної напруги залежить від напруги живлення. В основному значення вихідної напруги цих сенсорів не перевищує 4 В при номінальному значенні вимірюваного струму.
Похибка перетворення залежить від таких факторів:
1.Зміни
температури навколишнього середовища
впливають на зміщення вихідного сигналу
при
![]() ,
викликають нелінійність статичної
характеристики і змінюють значення
коефіцієнта підсилення вихідного
підсилювача.
,
викликають нелінійність статичної
характеристики і змінюють значення
коефіцієнта підсилення вихідного
підсилювача.
2.Зміни робочої температури викликають дрейф нуля вихідного струму (напруги) і зміну коефіцієнта передачі підсилювача.
Обмеження частотної характеристики в основному залежать від двох факторів:
1.Частотного діапазону електронної схеми, який залежить від типу використовуваного підсилювача;
2.Нагрівання осердя, яке залежить від вихрових струмів і втрат намагнічування при підвищених частотах.
Втрати
від вихрових струмів залежать від
![]() (товщина металу осердя),
(товщина металу осердя),
![]() (пікове значення магнітної індукції),
(пікове значення магнітної індукції),
![]() (частота).
(частота).
Втрати намагнічування пропорційні частоті і квадрату пікового значення індукції. Ці втрати залежать від ширини петлі гістерезису матеріалу осердя.
5.6.1 Сенсори струму компенсаційного типу
Дані перетворювачі називають сенсорами зі 100%-вим зворотним зв’язком, компенсаційними або сенсорами з нульовим потоком. Вони мають внутрішнє компенсаційне коло, за допомогою якого значно покращуються метрологічні характеристики порівняно з сенсорами прямого підсилення.
В той час, коли сенсори прямого підсилення формують вихідну напругу, пропорційну збільшеній холлівській напрузі, компенсаційні сенсори (рис. 5.17) формують вихідний струм, пропорційний напрузі Холла, який діє як сигнал зворотного зв’язку, щоб компенсувати магнітне поле, створене магнітним полем вимірюваного струму, або магнітним полем, яке створює вихідний струм.

Рисунок 5.17
Струм на виході сенсора компенсаційного типу визначається
![]() ,
,
де
![]() -
кількість витків первинної обмотки
(провідника зі струмом);
-
кількість витків первинної обмотки
(провідника зі струмом);
![]() -
кількість витків вторинної (вихідної)
обмотки.
-
кількість витків вторинної (вихідної)
обмотки.
Виходячи
з рівняння перетворення сенсора, індукція
вторинної обмотки
![]() еквівалентна
індукції первинної обмотки
еквівалентна
індукції первинної обмотки
![]() і їхні відповідні ампер-витки компенсують
один одного. Отже, система діє при
нульовому магнітному потоці в осерді.
і їхні відповідні ампер-витки компенсують
один одного. Отже, система діє при
нульовому магнітному потоці в осерді.
Наведемо
для прикладу перетворення постійного
струму 100 А. Кількість витків первинної
обмотки
![]() ,
тому що провідник веде прямо до магнітного
кола і тим самим складає один виток.
Вторинна обмотка має 1000 витків (
,
тому що провідник веде прямо до магнітного
кола і тим самим складає один виток.
Вторинна обмотка має 1000 витків (![]() ).
Співвідношення витків складає 1:1000.
).
Співвідношення витків складає 1:1000.
Як тільки струм стає додатним, в наскрізному отворі магнітного осердя виникає індукція , яка створюється напругою Холла. Ця напруга перетворюється в струм за допомогою генератора струму, каскад підсилювача якого забезпечує протікання струму через вторинну обмотку сенсора. Таким чином, створюється поле зі значенням індукції , яке компенсує поле зі значенням індукції .
Отже, остаточний вторинний вихідний струм матиме таке значення:
![]() .
.
Струм на виході сенсора є точним за формою відображенням струму на вході сенсора, але меншим в 1000 разів.
Діапазон вимірювання компенсаційних сенсорів широкий: від одиниць до десятків тисяч ампер з похибкою, що не перевищує 1%.
Компенсаційні сенсори здатні вимірювати постійний і змінний струми. Їхні переваги: висока точність, лінійність статичної характеристики, малий температурний дрейф, широкий частотний діапазон, відсутність додаткових втрат у вимірювальному колі.
На виході сенсора формується вторинний струм, який є струмом зворотного зв’язку. Цей струм можна перетворити в напругу за допомогою навантажувального опору.
Значення
навантажувального опору має знаходитись
в межах діапазону, що вказаний в технічному
паспорті на сенсор,
![]() ,
,
де
![]() -
опір, що визначається за допустимою
потужністю розсіювання електронних
схем сенсора;
-
опір, що визначається за допустимою
потужністю розсіювання електронних
схем сенсора;
![]() -
опір, який визначається для запобігання
електричного насичення кола з урахуванням
мінімального допустимого рівня напруги
живлення, при якій перекривається весь
діапазон перетворення.
-
опір, який визначається для запобігання
електричного насичення кола з урахуванням
мінімального допустимого рівня напруги
живлення, при якій перекривається весь
діапазон перетворення.