

Неравноточные
В равноточных не рассматривался вид погрешности НП они считались равноточными, имеющими одинаковые СКП.
Мы уравниваем измерения с учетом весов-величин обратно пропорциональных СКП. WAX=WU+WV
Q=(WV)T(WV)=min
9. Чтобы определить поправку компаса в море, необходимо получить истинное направление на светило С, т. е. его ИП и компасное направление на светило, т. е. его КП, тогда величина и знак ΔК определяются по формуле ΔК = ИП — КП.
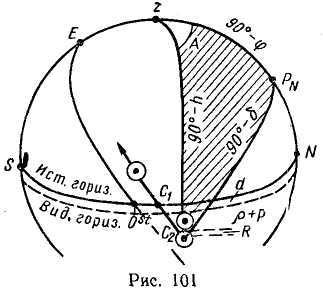
Метод моментов. Если при пеленговании светила замечен момент по хронометру и сняты с карты φc , λc , то ΔPnC по формуле котангенсов: ctg А =tg δ cos φc cosec tM — sin φc ctg tM. По этой формуле вычисляют азимут в полукруговом счете, переводят в круговой счет и принимают за ИП.
Метод высот. cos А — sin δ sec φc sec h — tg φc tg h
Применяется, когда высоту можно вычислить заранее
Метод высот и моментов. Если после наблюдения высот светила взять его пеленг по компасу и заметить Тхр, то одновременно с получением места судна или линии положения можно получить и поправку компаса.
Для вычисления h и A применяется система формул:
![]()
применяется, если высота светила получена предварительно, а азимут вычисляется попутно.
Метод высот и моментов применяется также при определениях ΔК по Полярной звезде, но ее высота не измеряется, а принимается равной φ.

ОПРЕДЕЛЕНИЕ ПОПРАВКИ КОМПАСА. ОБЩИЙ СЛУЧАЙ
При видимости светил поправка компаса может быть определена в любое время суток по методу моментов, который и представляет общий случай определения поправки компаса
Предварительные операции. Выбор условий наблюдений. На намеченное время подобрать светило с высотой до 10° (и не более 20°) с помощью звездного глобуса или на глаз. Проверка инструментов, Наблюдения. Пронаблюдать серию из трех пеленгов и КП. Получить навигационную информацию: Тс, ол, φ , λ, КК, ΔК.
Обработка наблюдений. Проанализировать ΔК; сравнить с принятой постоянной - расхождения не должны превышать точности курсоуказания (от ±0,3° в хороших условиях, до 1,5° — в плохих); + ВАС—58. ТВА—57. ЭВМ.
Вычисление азимута светила и поправки компаса по формуле ctg A.
ПО ВОСХОДУ (ЗАХОДУ) СОЛНЦА
1. Пронаблюдать пеленг Солнца в момент появления (или погружения) на горизонте его верхнего края.
2. Заметить момент Тс до 5м, рассчитать Тгр и выбрать из МАЕ δ до 0,10- На этот же момент снять φc до 0,1°, а в высоких широтах — до 3'.
3. Войти в табл. 20-а при одноименных φ и λ или 20-6 при разноименных и выбрать ближайшее к φ и λ значение Ат. Проинтерполировать азимут по б и ф и придать поправки к А г. Полученному азимуту приписать наименование в полукруговом счете и перевести его в круговой счет.
4. Рассчитать ΔК = ИП — КП.
5. Проанализировать ΔК. сравнением с принятой ранее и оценить возможные ошибки определения АК-.