

Поперечная цил проекция.
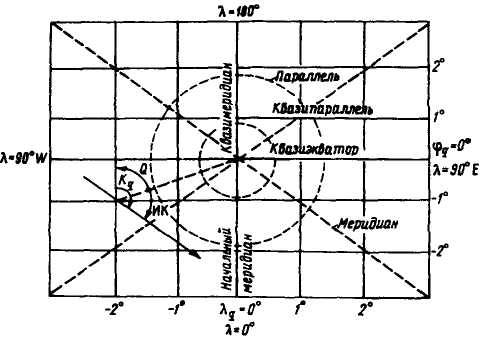
Для построения карт на приполюсные районы используется поперечная цилиндрическая проекция.Касающийся шара цилиндр ориентирован не по экватору а по полюсам,на карте можно изобразить полюса. В этой проекции на карту наносится квазигеографическая система координат, которая получается следующим образом (см рис). Северный полюс PN условно помещается в точку с координатами Ф = 0°, Л = 180°, а южный PS — в точку Ф = 0°, Л = 0°. = > квазиполюсa. Проведя квазимеридианы и квазипараллели относительно квазиполюсов, получим новую систему координат, повернутую на 90° относительно географической.
Основные уравнения поперечной равноугольной проекции имеют вид:
![]()
![]()
![]()
Где - радиус Земли (шара), м; m и n — частные масштабы по квазимеридиану и квазипараллели.
Прямая линия на рис – квазилоксодромия, пересек квазимер-ны под const курсов Kq
4. Погрешность характеризуется в зависимости от:
1![]() .
Эталона
.
Эталона
а![]() )
Истинная погрешность Δ=Х – ,где Х-
измеренная величина -истинное
значение.
)
Истинная погрешность Δ=Х – ,где Х-
измеренная величина -истинное
значение.
б)
Вероятнейшая V=X-
![]()
среднее значение измеренной величины
в) Относительная Vотн=V/
2. Причин: - систематические (связаны функционально с условием, методами и средствами измерений). Исключают: ввод поправок.
- случайные погр. (возникают под действием многочисленных, часто взаимо искл. друг-друга факторов нельзя предсказать, изучаются – мат. вероятностью и мат стат.)
- грубые (в результате невнимательности, неопытности) Исключают: повторным измерением.
Математической вероятностью – наз-ся объективная возможность появления какого-либо события в определенных условиях,обозначается Р
Хар-ки случайных измерений:
Мат.ожидание – центр, вокруг которого группируются случайные величины M(x)=ΣXiPi,
Xi-возможные значения; Pi-вер-ть появления событий.
Дисперсия – показывают рассеивание случайных величин относительно математического ожидания D(x)=Σ(Xi-M(x))2Pi
Среднеквадратическое отклонение – служит мерой разброса случайных величин.
Закон нормального распределения: случайная величина распределена по нормальному закону, если плотность ее распределения имеет следующий вид: f(x)=1/σ√2π*e-(x-μ)2/2σ2
μ,σ – параметры закона распределения
Основное св-во норм. распределения: при увеличении кол-ва измерений все законы распределения → к нормальному. Если погрешность измерений больше 3σ – это промах.
N(σ,μ)
 X
X
3σ 3σ
Оценка точности:
Точность измерения навиг.параметров оценивают: - статистической обработкой измерений
- расчетом ошибок измерений на основе опыта
- принятием значений ошибок по техническим хар-кам прибора
- по ф-ле Бесселя (оценка СКП относительно среднего значения измеряемой величины)
m=√ΣVi2/n-1
- с использованием коэф.размаха “К” m=(Umax-Umin)k
- m=σ; m=2σ – СКП 95% уровня вер-ти;
m=3σ – СКП 99,7% предельная точность.
Систематические погрешности измерений:
(*)Сист.ошибки – это ошибки величина и направление которых постоянны или изменяются по определенному закону.
Вероятность и частота:
Вероятность оценивается частотой P*(A)=m/n
m- кол-во данных событий в серии экспер.
n – кол-во экспер.
0≤P(A)≤1 P(A)= 1 – событие достоверно
P(A)=0 – событие невозможно
5. НП -это линейные или угловые величины , функционально зависящие от координат места судна и координат навигационных ориентиров.
навигационные параметры:
•Пеленг на ориентир (П). Здесь под пеленгом понимается истинный пеленг (ИП). изолинией пеленга или изопеленгой (изоазимутой на сфере).
![]()
т = ИП - 90°.
•Расстояние (D) Эта окружность будет называться изолинией расстояния или изостадией.
![]()
•Горизонтальный угол между двумя ориентирами ()Эта окружность называется изолинией горизонтального угла α или изогоной.
вектор cb представляет_геометрическую разность двух векторов градиентов направлений аЬ и ас, т. е. g = gl –g2, где g — градиент горизонтального угла α.
Модуль градиента определяется из ∆асЬ.
Подставляя g1=1/D1 g2=1/D2
![]() Т
Т![]() =П1+б±90
где б-вспомогательный угол
=П1+б±90
где б-вспомогательный угол
![]() •Разность
расстояний до двух ориентиров (D)
В некоторых радионавигационных системах
измеряется разность расстояний до двух
ориентиров. Тогда изолинией разности
расстояний будет гипербола
•Разность
расстояний до двух ориентиров (D)
В некоторых радионавигационных системах
измеряется разность расстояний до двух
ориентиров. Тогда изолинией разности
расстояний будет гипербола
g=2sin(w/2) где w-базовый угол.
Т=Аср.±90
![]()
множество значений НП определяют навигационную функцию (НФ), т.е. мат.зависимость НП от координат места судна U=f(,)
НИ- это геометрическое место точек равных значений навигационных параметров U0=f(,)=const
ее вектор-градиент g
Градиент навигационной функции - это вектор максимальной скорости изменения НФ в конкретной точке поля навигационных параметров, который направлен по нормали к навигационной изолинии в сторону увеличения НП.

Линией положения называется прямая, заменяющая участок навигационной изолинии вблизи счислимого места судна.