65. Основные этапы демодуляции/обнаружения
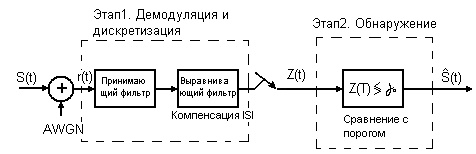
Демодуляцией называется процесс восстановление переданного сигнала по его принятой искаженной версии. Обнаружением называется принятие решения относительно цифрового значения восстановления сигнала. Обычно эти оба процесса объединяют под термином демодуляции:
В начале искаженная
версия
сигнала
![]() поступает на принимающий фильтр. Этот
фильтр выполняет задачу восстановления
переданного импульса с максимальным
отношением «сигнал \ шум» (SNR).
Фильтр, выполняющий эту задачу, называется
согласованным фильтром или коррелятором.
За принимающим фильтром может находиться
схема выравнивания, которая необходима
для систем, в которых заметна межсимвольная
интерференция. Рассмотрим процесс
обработки на одном ИПБ [0, Т].
поступает на принимающий фильтр. Этот
фильтр выполняет задачу восстановления
переданного импульса с максимальным
отношением «сигнал \ шум» (SNR).
Фильтр, выполняющий эту задачу, называется
согласованным фильтром или коррелятором.
За принимающим фильтром может находиться
схема выравнивания, которая необходима
для систем, в которых заметна межсимвольная
интерференция. Рассмотрим процесс
обработки на одном ИПБ [0, Т].
На схему дискретизации в момент времени Т поступает некоторое мгновенное значение Z(T), которое называется тестовой статистикой. Значение Z(T) прямо пропорционально энергии сигнала и обратно – шуму. Выход устройства дискретизации называется додетекторной точкой.
Z(T)
можно представить в виде
![]() , где
, где
![]() - ожидаемый компонент статистики Z(T)
(её среднее),
- ожидаемый компонент статистики Z(T)
(её среднее),
![]() - компонент шума с нулевым средним и
дисперсией
- компонент шума с нулевым средним и
дисперсией
![]() .
.
Т.о. Z(T)
– случайная величина со средним равным
![]() или
или
![]() в зависимости от того, передан на интервал
[0, T]
0 или 1.
в зависимости от того, передан на интервал
[0, T]
0 или 1.
После того, как принятый сигнал преобразован в величину Z(T) реальная форма сигнала значения не имеет. Любые сигналы, отображаемые устройством дискретизации в одно и то же значение Z(T) для схемы обнаружения являются идентичными. Величина Z(T) зависит от энергии принятого сигнала.
На этапе 2 проверка
цифровых значений (0, 1) выполняется как
проверка статистической гипотезы.
Гипотеза
![]() утверждает, что передан 0, а гипотеза
утверждает, что передан 0, а гипотеза
![]() - 1. Проверка выполняется сравнением
тестовой статистики с пороговым значением
- 1. Проверка выполняется сравнением
тестовой статистики с пороговым значением
![]() .
.
Если Z(T)>
,
то принимается решение о том, что передана
1. Подтверждение гипотезы
происходит тогда, когда Z(T)<
.
При Z(T)=
решение может быть любым. Согласно
принципу максимального правдоподобия
порог
задается в т. пересечения 2-х условных
плотностей
![]() и
и
![]() .
Т.к. обе плотности симметричны относительно
т.
.
Т.к. обе плотности симметричны относительно
т.
![]() и
и
![]() ,
порог максимального правдоподобия :
,
порог максимального правдоподобия :
![]() .
.
66-67. Согласованный фильтр и коррелятор
В аналоговой связи
для характеристики ее качества
используется показатель сигнал – шум
![]() ,
где S
– средняя мощность сигнала,
,
где S
– средняя мощность сигнала,
![]() - средняя мощность шума. В цифровой связи
используется нормированная версия
этого показателя
- средняя мощность шума. В цифровой связи
используется нормированная версия
этого показателя
![]() ,
где
,
где
![]() - энергия бита на [0, Т], умноженная на
длину этого интервала (
- энергия бита на [0, Т], умноженная на
длину этого интервала (![]() ),
),
![]() - мощность шума деленная на ширину
полосы
- мощность шума деленная на ширину
полосы
![]() .
.
Т.о. величина
 - скорость передачи бит/сек.
- скорость передачи бит/сек.
Чем больше соотношение , тем больше вероятность правильного обнаружения сигнала.
Оптимальный
согласованный принимающий фильтр –
это линейный фильтр, который обеспечивает
для заданного сигнала S(t)
максимальное отношение “ сигнал/шум
”. Предположим, что на схеме обработки
отсутствует необязательный выравнивающий
фильтр, а искажение определяется только
шумом AWGN.
Оптимальный фильтр обеспечивает
максимальное соотношение «сигнал/шум»
в момент времени t=T:
 .
Это отношение обеспечивается тестовой
статистикой
.
Это отношение обеспечивается тестовой
статистикой
![]() .
Max
SNT
для заданного сигнала S(t)
будет обеспечена тогда, когда этот
сигнал пропускается через фильтр с
частотной характеристикой
.
Max
SNT
для заданного сигнала S(t)
будет обеспечена тогда, когда этот
сигнал пропускается через фильтр с
частотной характеристикой
![]() ,
где k
– константа,
,
где k
– константа,
![]() - комплексно – сопряженное преобразование
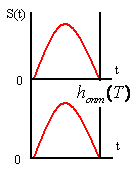
Фурье сигнала S(t).Импульсная
характеристика оптимального согласованного
фильтра получается применением
преобразования Фурье к
- комплексно – сопряженное преобразование
Фурье сигнала S(t).Импульсная
характеристика оптимального согласованного
фильтра получается применением
преобразования Фурье к
![]() (*)
(*)
Т.о. импульсная характеристика оптимально согласованного с сигналом фильтра должна быть зеркальным отображением сигнала S(t), сдвинутым на интервал длиной Т. Выход согласованного фильтра представляет собой свертку сигнала S(t) с его импульсной характеристикой.
 .
Подставим
вместо t
T
получим:
.
Подставим
вместо t
T
получим:
 .
Подставим соотношение (*):
.
Подставим соотношение (*):