

Рекомендации по выбору значений параметров элементов схемы
В схемах предлагаемых вариантов заданий содержится одна индуктивность L = 25мГн, одна емкость С = 1мкФ и до пяти активных сопротивлений. Параметры этих элементов следует выбрать таким образом, чтобы цепь обладала резонансными свойствами, иными словами, нужно добиться того, чтобы в цепи имел место колебательный переходный процесс. Для достижения колебательного переходного процесса необходимо:
выбором величин сопротивлений добиться того, чтобы собственные числа матрицы А стали комплексно – сопряженными;
обеспечить такое соотношение между затуханием α и частотой собственных колебаний ω0, чтобы график какой – либо составляющей матричной экспоненты 2 - 4 раза пересек нулевой уровень.
В приложениях используют различные меры колебательности процесса. В качестве таковой можно использовать, например, величину ξ, определяемую следующим соотношением:
![]() (2.37)
(2.37)
Величина ξ численно равна отношению амплитуды переходного процесса в момент времени t+T0 к амплитуде процесса в момент времени t. Чем больше величина ξ, тем больше число периодов собственных колебаний будет наблюдаться на графике переходного процесса. При отрицательных Re(λ) и |Im(λ)| → 0, ξ→ 0, процесс превращается в апериодический и никаких колебаний не наблюдается.
В нашем примере T0 = 1.04×10-3 с, τ = 0.461×10-3 с, ξ=0.105. Как видно из графиков, приведенных на рисунке 2.1, такой выбор значений параметров элементов схемы позволяет наблюдать в поле графика 2 периода собственных колебаний.
Для предварительного выбора величин сопротивлений можно руководствоваться следующими соображениями физического характера.
Колебательный характер переходного процесса обусловлен перетеканием энергии от емкости к индуктивности и обратно. Этому перетеканию «мешают» активные сопротивления, которые рассеивают электрическую энергию, необратимо превращая ее в тепло. Выделим на схеме «контур обмена энергией», контур по которому протекает ток между индуктивностью и емкостью. Для схемы рассматриваемого примера такой контур показан на рисунке 2.2.
Д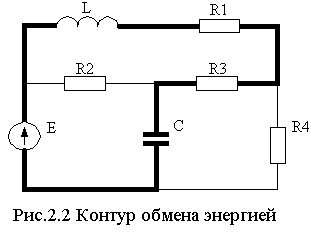 ля
уменьшения потерь энергии необходимо
и «расчистить путь» этому току, задав
малые значения сопротивлениям, вошедшим
в контур. На рис.2.2 это сопротивления R1
и R3.
ля
уменьшения потерь энергии необходимо
и «расчистить путь» этому току, задав
малые значения сопротивлениям, вошедшим
в контур. На рис.2.2 это сопротивления R1
и R3.
Величины сопротивлений в других ветвях схемы, которые отходят от «контура обмена» (на рис.2.2 это R2 и R4) , напротив, следует задать большими, чтобы уменьшить их шунтирующее действие.
Этих мер достаточно для того, чтобы цепь обрела колебательный переходный процесс и, следовательно, стала резонансной. Далее следует в интерактивном режиме подобрать соотношения сопротивлений таким образом, чтобы величина ξ находилась в пределах [0.1; 0.2].
Расчет реакции схемы на ступенчатое воздействие
Решение неоднородного ДУ зависит от характера изменения функции внешнего возбуждения E(t). Рассмотрим частный случай, когда E(t) представляет собой единичную ступенчатую функцию:
![]()
Такое изменение E(t) соответствует включению источника ЭДС в момент t = 0, а искомое решение ДУ представляет собой реакцию схемы на это включение. Будем полагать, что до момента t = 0 схема находилась в нулевом состоянии: токи в ветвях схемы отсутствовали, и напряжения на ее элементах были равны нулю.
Воспользовавшись соотношениями (2.2), (2.7) и (2.10), получаем аналитическое выражение для решения неоднородного ДУ:
![]() , (2.34)
, (2.34)
где вектор b, согласно
(1.11), имеет вид: .
.
Выражение (2.34) можно представить в иной форме:
![]() , (2.35)
, (2.35)
где Xust - установившееся значение вектора переменных состояния:
![]() ,
(2.36)
,
(2.36)
При реализации вычислений по выражениям (2.34 - 2.35) следует учесть, что они верно отражают поведение процесса только для t ≥ 0, а при t < 0 компоненты получаемого вектора должны быть тождественно нулевыми. Следовательно, использовать единичную матрицу как константу здесь нельзя, требуется ввести дополнительную матричную функцию, которая бы возвращала единичную матрицу при t ≥ 0 и нулевую матрицу при t < 0. Такую «физически реализуемую» единичную матрицу можно построить, с помощью матричной функции следующего вида:
![]()
Здесь задействованы встроенные функции MathCad: функция identity(n), возвращающая единичную матрицу размера n и функция rows(A), возвращающая число строк в матрице – аргументе. Условное выражение if( t < 0, 0, 1 ) возвращает 0 при t < 0 и 1 при t ≥ 0.
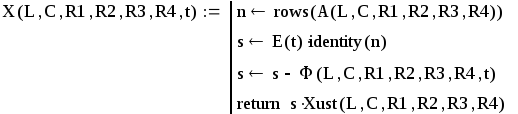
Последовательность операторов MathCad, выполняющих расчет переходного процесса по соотношению (2.35) можно записать в таком виде:
![]()

Графики процессов iL(t) и Uc(t) воспроизведены на рисунках (2.2) и (2.3).
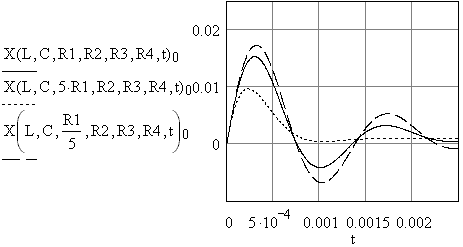
Рис. 2.3. Ток через индуктивность при различных значениях R1
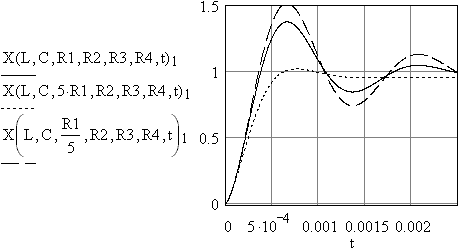
Рис. 2.4. Напряжение на емкости при различных значениях R1
Графики на рисунках 2.3 и 2.4 отражают изменение переменных состояния при переходном процессе при различных величинах сопротивления R1: 10 ом, 50 ом и 2 ома. Видно, что с увеличением R1 происходит демпфирование колебаний.
Приведенные графики, скопированные с рабочего листа MathCad, показывают преимущество, создаваемое полным списком параметров в используемых функциях, о котором упоминалось в п.1.3. Достаточно изменить интересующий нас параметр непосредственно в операторе вызова функции и здесь же можно наблюдать эффект этого изменения.
Выполним расчет наблюдаемых переменных. Согласно (1.13), связь наблюдаемых величин, в нашем случае это UR4(t) и iC(t), с переменными состояния iL(t), Uc(t) и функцией внешнего воздействия E(t) линейна и задается матрицей наблюдения K, функция вычисления которой была введена в п.1.3. Функция вычисления вектора наблюдаемых величин Y на MathCad выглядит следующим образом:

Библиотечная функция stack использована здесь для дополнения вектора состояний X компонентой E(t) – текущим значением функции внешнего возбуждения.
На рисунках 2.5 и 2.6 показаны графики UR4(t) и iC(t), соответствующие процессам, приведенным на рисунках 2.3 и 2.4.
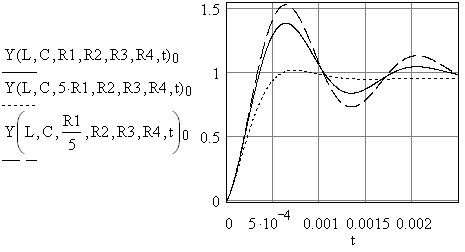
Рис. 2.5. Напряжение на резисторе R4 при разных значениях R1
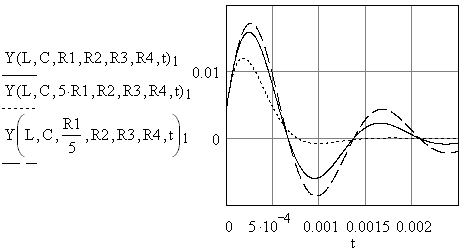
Рис. 2.6. Ток через емкость при разных значениях R1
Построенные функции для расчета переходного процесса в отклике на ступенчатое воздействие позволяют очень просто получить реакцию схемы на прямоугольный импульс.
Прямоугольный импульс можно представить в виде суммы сдвинутых во времени ступенчатых функций разной полярности. В линейных системах отклик на линейную комбинацию входных сигналов представляет ту же линейную комбинацию реакций на каждый из сигналов. Исходя из этого свойства линейных систем, можно получить реакцию, как на одиночный прямоугольный импульс, так и на любую последовательность таких импульсов.
Нас будет интересовать реакция цепи на одиночный прямоугольный импульс и на периодическую последовательность прямоугольных импульсов.