

Хвих т т хвих
х

 вх
хвх
вх
хвх






2 1
kxвх хвих=kxвх




1 1

 0 t
0
t
0 t
0
t
 а
г
а
г


Хвих хвих
хвх 2 ∞
1


kхвх



 1
1
1
1


 0 t
0 t
0 t
0 t
б д
x вих
с
вих
с
х







 вх
вх
 хвих=f(t)
i
хвих=f(t)
i



 uc
uc
 хвх=f(t)
uвх
R
uвих
хвх=f(t)
uвх
R
uвих


 arctgk
arctgk
1

 0 t
0 t
в e
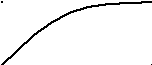
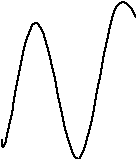
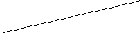
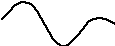
мал.2.1. Перехідні процеси в ланках:
а – аперіодичній; б – коливальній; в – інтегруючій; г – підсилюючій; д - ідеальній диференціюючій; е - схема диференціюючої ланки
Розв’язуючи рівняння (2.2) відносносно хвих(t), отримаємо
xвих(t) = kxвх (1 – e-t/T ) (2.4)
або при хвх = 1 маємо перехідну функцію аперіодичної ланки:
h(t) = k (1 – e-t/T ) (2.5)
Графік перехідного процесу в аперіодичній ланці зображений на мал. 2.1, а кривою 1. Як видно з рівняння (2.4) та мал. 2.1, а, перехідний процес в аперіодичній ланці повністю визначається значеннями коефіцієнта підсилення ланки k та її постійної часу Т.
Якщо диференційне рівняння аперіодичної ланки має вигляд
Тdxвих/dt – xвих = kxвх (2.6)
то перехідний процес в ній описується рівнянням
xвих(t) = ket/T (2.7)
і задається кривою 2 на мал. 2.1, а. Ланка, яка описується рівнянням (2.6), називається нестійкою аперіодичною ланкою.
Аперіодичні ланки в лінійних динамічних системах зустрічаються дуже часто. Наведемо деякі приклади.
Приклад 1. Нехай до обмотки ОВГ (мал. 1.6, а) поданий скачок напруги uв. Диференційне рівняння ланки, що розглядається, має вигляд
uв = iвRв + Ldiв/dt або uв/Rв = iв + Tdiв/dt,
де T=L/Rв – постійна часу ланцюга ОВГ: L – індуктивність ланцюга; Rв – опір ланцюга.
Враховуючи, що в ланці що розглядається iв =x вих, uв=xвх, отримуєм
Tdxвих/dt + xвих = kxвх,
де k = xвих / xвих = 1 / Rв - коефіцієнт підсилення.
Приклад 2. Якщо в схемі (мал. 1.6, б) розглянути зв’язок між змінними ω та і, то, використовуються електромеханічні властивості системи що розглядається при умові пропорційності між ω та Мс – моментом опору на валу електродвигуна, можна отримати
Тdω/dt + ω = ki,
де Т = І/с1 – постійна часу; І – момент інерції, приведений до валу двигуна; с1 коефіцієнт пропорційності між Мс і ω; k=kм/с1 – коефіцієнт підсилення; kм - коефіцієнт пропорційності між момементом М, який розвивається двигуном, та струмом і.