

Продолжение табл. 4
|
вариант |
37 |
38 |
39 |
40 |
41 |
42 |
43 |
44 |
45 |
|
K |
-100 |
4000 |
-160 |
630 |
1000 |
0,1 |
-250 |
2500 |
-400 |
|
n |
0 |
1 |
0 |
0 |
0 |
2 |
0 |
1 |
0 |
|
T1 |
0 |
0 |
0 |
0 |
0 |
8 |
0 |
0 |
0 |
|
x |
0 |
0 |
0 |
0 |
0 |
1,74 |
0 |
0 |
0 |
|
T2 |
0,13 |
0,013 |
0,32 |
0,16 |
0,016 |
0 |
2,5*10-3 |
0,04 |
0,01 |
|
T3 |
0,05 |
0,063 |
0,8 |
0,13 |
0,032 |
63 |
0,01 |
0,16 |
6,3*10-3 |
|
x |
0,5 |
1,11 |
1,25 |
1,25 |
-0,2 |
0,3 |
1,03 |
1,4 |
1,74 |
|
a |
-1 |
0 |
-1 |
1 |
1 |
0 |
-1 |
0 |
-1 |
|
T4 |
0,25 |
0,1 |
1,6 |
0,032 |
6,3*10-3 |
0 |
0,01 |
0,13 |
0,016 |
|
x |
-0,48 |
0,5 |
0,47 |
1,03 |
1,11 |
0 |
-1,05 |
1 |
0,75 |
|
S |
3 |
3 |
3 |
2 |
2 |
2 |
3 |
2 |
3 |
|
g |
25 |
35 |
25 |
35 |
60 |
55 |
55 |
45 |
20 |
|
wc |
63 |
250 |
2 |
630 |
250 |
1 |
200 |
316 |
10 3 |
|
g(t) |
7 |
8 |
9 |
10 |
1 |
2 |
3 |
4 |
5 |
Продолжение табл. 4
|
вариант |
46 |
47 |
48 |
49 |
50 |
51 |
52 |
53 |
54 |
|
K |
250 |
-160 |
250 |
-250 |
630 |
160 |
630 |
-630 |
400 |
|
n |
0 |
0 |
0 |
0 |
1 |
0 |
1 |
0 |
0 |
|
T1 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
x |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
T2 |
1,3*10-3 |
0,032 |
2,5*10-3 |
1,3*10-3 |
10.-3 |
0,32 |
0,01 |
10 |
0,01 |
|
T3 |
8*10-4 |
0,05 |
0,01 |
5*10-4 |
5*10-3 |
0,8 |
0,063 |
2 |
6,3*10-3 |
|
x |
1,4 |
0,1 |
1,03 |
1,25 |
1,03 |
1,25 |
0,1 |
0,05 |
1,74 |
|
a |
1 |
-1 |
1 |
-1 |
0 |
1 |
0 |
-1 |
1 |
|
T4 |
5*10-4 |
0,13 |
0,01 |
2*10-3 |
1,3*10-3 |
1,6 |
0,05 |
5 |
4*10-3 |
|
x |
1,25 |
-0,46 |
1,4 |
-0,23 |
1 |
1,11 |
1 |
0 |
1,03 |
|
S |
3 |
3 |
3 |
2 |
3 |
2 |
3 |
3 |
2 |
|
g |
45 |
20 |
45 |
60 |
55 |
35 |
20 |
60 |
55 |
|
wc |
6300 |
100 |
200 |
6300 |
400 |
2 |
10 |
10 |
1000 |
|
g(t) |
6 |
7 |
8 |
9 |
10 |
1 |
2 |
3 |
4 |
Таблица 5
|
g1(t) |
g2(t) |
g3(t) |
g4(t) |
g5(t) |
|
0,5*1(t) |
3t |
0,1*sin0*ср(t) |
2*1(t) |
6*sin30*ср(t) |
|
g6(t) |
g7(t) |
g8(t) |
g9(t) |
g10(t) |
|
5t |
10*1(t) |
0,2t |
3*cos0,5*ср(t) |
0,2*sin0,1*ср(t) |
Пример выполнения пункта 2.2.2.:
![]()
Дано:
S=2; c=300 c-1; K=2500; T6=0,05 c-1; T5=0,001 c-1; T3=0,01; g(t)=0,2t; =1; =200
![]()
1. Строим ЛАХ нескорректированной системы (рис.2)
20 lgK=20 lg2500=67,95 6=1/T6=20 c –1; 5=1/T5=1000 c-1; 3=1/T3=100 c-1;
Нескорректированная система не имеет запаса устойчивости по фазе и амплитуде.
2. Синтезируем желаемую ЛЧХ согласно исходных данных. Для данного типа ЖЛАХ определяем сопрягающие частоты 4 и 2.
![]()
![]()
![]()
![]()
Cтроим ЖЛАХ (рис.2).
3. Строим ЛЧХ корректирующего устройства (рис.2):
Lк=Lж-Lн; к=ж-н;
ПФ корректирующего устройства:
![]()
ПФ ЖЛАХ:
![]()
4. Ошибка от задающего воздействия:
gуст=limp0pФg(p)g(p);

![]()
![]()
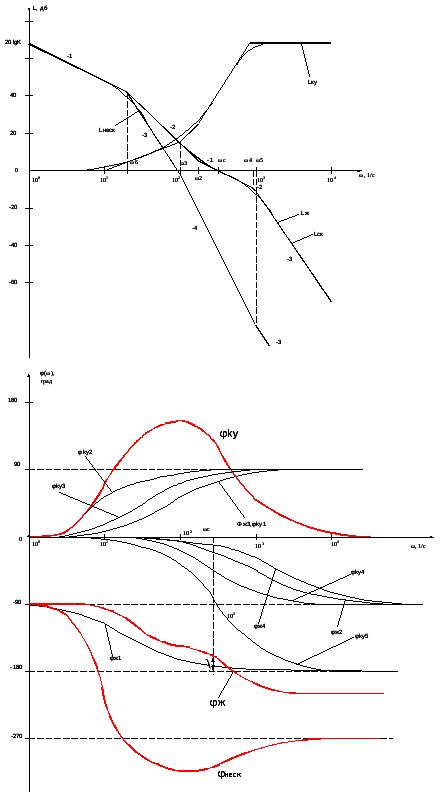
Рис.2 ЛЧХ и ФЧХ нескорректированной системы, КУ, скорректированной системы