

12. Централизованная рассредоточенная структура.
Ц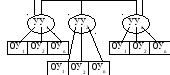
 ентрализованная
рассредоточенная структура. В ней
сохраняется принцип централизованного
управления, т.е. выработка управляющих
воздействий на каждый ОУ основана на
информации о состоянии всей совокупности
ОУ. Для реализации функции управления
каждый локальный орган по мере
необходимости вступает в процессе
информационного взаимодействия с
другими объектами управления.
ентрализованная
рассредоточенная структура. В ней
сохраняется принцип централизованного
управления, т.е. выработка управляющих
воздействий на каждый ОУ основана на
информации о состоянии всей совокупности
ОУ. Для реализации функции управления
каждый локальный орган по мере
необходимости вступает в процессе
информационного взаимодействия с
другими объектами управления.
Плюсы: 1) снижение требований производительности и надежности каждого центра обработки и управления. Минусы: 1) усложнение информационных процессов из-за необходимости обмена данными между центрами обработки и управления, а также корректировка хранимой информации.
31. Первая управляющая цифровая система управления.
Первая цифровая СПУ, положившая начало ЧПУ, была построена в Массачусетском университете в 1952 году.
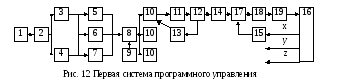
1 – считывающее устройство преобразует информацию программы, записанной на перфоленте, во временную последовательность импульсов, которые через цепь управления 2 и распределители импульсов 3 и 4 поступают в промежуточную память, т.е. накопители 5, 6, 7.
Каждый накопитель предназначен для хранения информации, соответствующей одной оси координат и имеет два регистра. Когда один регистр принимает импульсы с перфоленты, второй подает сигнал в систему управления и наоборот, в результате чего обеспечивается непрерывное управление. С накопителей кодированные импульсы поступают в интерполятор 8. Генератор эталонной (тактовой) частоты 9 синхронизирует работу всей системы. Интерполятор преобразует информации программы, заданную определенным числом значений координат основных опорных точек обрабатываемого контура в естественную последовательность импульсов, каждый из которых обеспечивает приращение подачи на одну и ту же величину (0,01 мм). Из интерполятора три потока импульсов каждый по своей координате поступает в три преобразователя унитарных импульсов в непрерывный аналоговый сигнал «цифра-угол».
Каждый преобразователь «ц-у» представляет собой импульсную следящую систему, состоящую из электродвигателя 12, на валу которого находится импульсный датчик угла поворота 13 и сельсин 14. (Сельсин — это индукционная машина системы индукционной связи. Сельсинами (от англ. self-synchronizing) называются электрические микромашины переменного тока, обладающие свойством самосинхронизации. Сельсин передачи работают по принципу обычной механической передачи, только крутящий момент между валами передаётся не зубьями шестерён, а магнитным потоком без непосредственного контакта.) Импульсы датчика сравниваются в реверсивном счетчике 10 с импульсами, считываемыми с перфоленты. Полученный сигнал рассогласования через усилитель 11 управляет двигателем 12. В результате сельсин отрабатывает угол, пропорциональный числу считанных программ. Сельсин 14 с фазовым дискриминатором 17, вторым сельсином 15, который с управляемым электродвигателем станка 16, реечно-шестереночной передачей, усилителем 18 и гидроприводом 19 образуют следящий привод подачи соответствующей координаты. Таким образом, отрабатываемые перемещения пропорциональны числу импульсов, поступающих с интерполятора.
Билет №13