

7. Информационно-справочная асу.
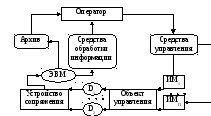
Рис. 3 Структурная схема ИСС1 (D1 и D2 – датчики, ИМ – исполнительные механизмы)
ЭВМ представляет широкие возможности для математической обработки данных, что позволяет прогнозировать изменение контролируемых параметров. В математическом обеспечении ЭВМ входит библиотека рабочих программ, каждая из которых выполняет одну или несколько функций контроля и программа-диспетчер, которая по заранее определенному порядку или в зависимости от текущих значений технологических параметров выбирает для выполнения ту или иную рабочую программу. Порядок выполнения может быть нарушен сигналом прерывания, который производится и отрабатывается специальной подпрограммой программы диспетчера. Сигнал прерывания может поступить от датчиков или оператора.
ИСС2. Выполняемые функции: 1) сбор и обработка информации, 2) определение рационального технологического режима по отдельным технологическим параметрам; 3) определение управляющих воздействий; 4) определение значений уставок локальных регуляторов.
Способы реализации: 1) программа-диспетчер инициирует подпрограмму анализа управляющего процесса; 2) производит вычисление управляющих воздействий при отклонении параметров управляемого процесса от заданных технологических режимов; 3) вычисление управляющих воздействий при введении оператором дополнительных данных, которые невозможно получить путем измерений.
Применение: 1) при осторожном подходе к решениям, выработанными формальными методами; 2) при неопределенности математического описания процесса; 3) при неадекватности математической модели в целом; 4) когда критерии управления носят качественный характер и существенно изменяются в зависимости от большого числа внешних факторов. При большом разнообразии и объеме дополнительных данных общение оператора с ЭВМ строится в форме диалога. Структурная схема ИСС2 такая же, как и у ИСС1.
26. Геометрическая задача при позиционном управлении.
При прямоугольной позиционной обработке последовательно используют отдельные следящие приводы подач декартовой формообразующей системы координат. Опорные точки в этом случае расставляют в местах, где происходит смена управляемых координат и где принудительно изменяется скорость задач.
Программа управления содержит группы кадров, предусматривающих использование в рамках группы одного инструмента. Блок открывается кадром, в котором закодировано перемещение нужного инструмента в начальное положение перед очередной операцией. Специфика прямоугольной обработки не меняет в устройстве ЧПУ формального содержания процесса переработки управляющей команды: ввод, вычисление и выдача оперативных управляющих команд следящим приводам станка. Мера сложности геометрической задачи определяется программным наполнением ее фаз: уровнем начального контроля исходных текстов, степенью автоматизации подготовительных траекторных расчетов, возможностью вмешательства оператора в процесс автоматического управления, числом алгоритмов интерполяция, числом управляющих координат, возможностью настройки и коррекции следящих приводов.
Билет №8