

5. Схема переработки информации в асу.

Рис. 2 Схема переработки информации в АСУ
ОУ – объект управления, 1 – сбор текущих данных о состоянии объекта, 2 – первичная обработка данных, 3 – расчет параметров управляемого объекта с учетом влияния возмущений, 4 – сравнение фактических значений параметров с требуемыми, 5 – оценка значений отклонения, 6 – расчет возможных вариантов решения задачи управления, 7 – принятие решения, 8 – выработка управляющего воздействия, 9 – исполнение решения органами управления.
24. Алгоритмы линейной интерполяции.
В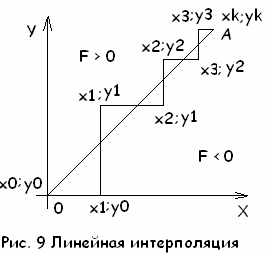 большинстве ЧПУ ЛКИ производится по
методу оценочной функции.
большинстве ЧПУ ЛКИ производится по
методу оценочной функции.
Алгоритм линейной интерполяции.
Интерполируемая прямая ОА делит плоскость XY на две области: там, где оценочная функция F>0 и F<0, где F – оценочная функция для каждой промежуточной точки траектории интерполяции. Она зависит от координат конечной точки отрезка, вводимых программой и вычисляемых координат xi, yj. Величина и знак оценочной функции вычисляется интерполятором. Если промежуточная точка и находится в F>0, то следующий шаг по оси Х, если точка в области F<0, то следующий шаг по оси Y. Если интерполируемый отрезок совпадает с осью Х, то траектория совпадает с самим отрезком и не выходит из области F=0. обычно всегда первый шаг делается по Х, но если интерполируемый отрезок совпадает с Y, то первичный шаг не делается.
Круговая интерполяция
О кружность,
на которой расположен интерполируемый
отрезок траектории, представлена
областью F=0 и делит
плоскость XY на две области:
вне окружности F>0, внутри
окружности F<0 (для первого
квадранта).
кружность,
на которой расположен интерполируемый
отрезок траектории, представлена
областью F=0 и делит
плоскость XY на две области:
вне окружности F>0, внутри
окружности F<0 (для первого
квадранта).
В общем случае правило выбора шагов при интерполяции с оценочной функцией зависит от направления движения и квадранта.
Координата начальной точки траектории определяется по формуле: R2= X2 +Y2, где R – радиус интерполируемой дуги окружности. Алгоритм интерполяции оценочной функции достаточно просто реализуется программно. Есть трехкоординатный и пятикоординатный линейный круговой интерполятор.
Билет №6
6. Асу (определение, классификация).
АСУ – Автоматизированная система управления – система «человек – машина», призванная обеспечить автоматизированный сбор и обработку информации, необходимой для оптимизации процесса управления.
АСУ – человеко-машинная система, основанная на комплексном использовании экономико-математических методов и технических средств автоматической обработки информации для решения основных задач управления производственно-хозяйственной деятельности.
В зависимости от роли человека в процессе управления системы можно разделить на два больших класса: 1) информационно-справочные и информационно-советующие системы, 2) управляющие системы. 1 – ИСС1 обеспечивает сбор и выдачу в удобном для обозрения виде измерительной информации о ходе ТП. Она служит рекомендацией оператору, причем основная роль в этих системах принадлежит человеку.
25. Фазовый следящий привод для отработки управляющих сигналов.

1 – интерполятор или блок интерполяции; 2х – накопитель абсолютной координаты по Х; 2y, 2z – накопители абсолютной координаты по Y, по Z; 3 – преобразователь «код-фаза», 4 – фазовый дискриминатор; 5 – регулируемый привод; 6 – исполнительный орган; 7 – фазовый датчик обратной связи по положению.
Абсолютная текущая координата Х, представленная в безразмерных дискретах, смещает фазу опорного сигнала Umsinωt на угол φ. Датчик обратной связи по положению передает косвенную информацию о перемещении исполнительного органа через поворот фазы своего гармонического сигнала на угол ψ. Цена управляющей дискреты определяется значением Δφ, которое зависит от характеристики преобразователя «код-фаза».
Билет №7