

17. Позиционная и цикловая система чпу.
Числовое программное управление станка, робота, других объектов – способ управления на основе априорно составленной управляющей программы, основные показатели которой заданы в цифровой форме.
Позиционное числовое программное управление – управление, при котором целью является перемещение рабочего органа объекта в заданные точки. При одновременном движении рабочего органа вдоль двух или нескольких осей координат объекта ни траектория, ни результирующая скорость подачи такого явления не определены.
Цикловое программное управление – способ управления на основе априорно составленной управляющей программы, основным содержанием которой является описание дискретного процесса из конечного множества законченных операций с установлением для них отношений следования и параллелизма. Устройство циклового программного управления получает на вход системы сигналы, свидетельствующие о поступлении условий смены операции, а на выходе формирует воздействие на исполнительные органы объекта, инициирующие выполнение операций.
Цикловая система программного управления – простейшие позиционные системы, в которых отсутствует информация о размерных параметрах, а требуемое перемещение задается предварительной настройкой кинематических элементов станка.
36. Самонастраивающаяся система адаптивного управления.
Самонастраивающаяся система - система, в которой на основе информации о внешних воздействиях, динамических характеристиках объекта или системы, получаемой в процессе работы, осуществляется активное изменение параметров регулятора для обеспечения оптимальной работы замкнутой системы.
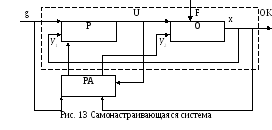
Самонастраивающаяся система является иерархической системой управления. Каждый уровень иерархии выполняет определенную задачу в управлении. 1-ый уровень – основной контур построен по принципу отклонения и содержит объект регулирования и регулятор. g – входное управляющее воздействие, U – управляющее воздействие, f – возмущающее воздействие, х – выходная величина объекта, y1 – настраиваемые параметры регулятора, y2 – корректирующее воздействие регулятора адаптации.
Регулятор адаптации РА выполняет задачу поддерживания или отыскания таких параметрических и координатных воздействий на объект управления, которые обеспечивают поддержание требуемых или оптимальных характеристик управления.
Принцип работы СНС заключается в следующем: задается некоторая мера качества Q. В общем случае это может быть функционал или функция, зависящая от координат и параметров системы. В процессе работы значение меры качества изменяется в зависимости от изменения входного управляющего и возмущающего воздействий и динамических свойств объекта.
Билет №18
18. Задачи программного управления.
Для станка с ЧПУ характерны следующие задачи: 1) взаимодействие устройства ЧПУ с объектом, станком, состоит в управление формообразования детали – геометрическая задача ЧПУ; 2) управление дискретной автоматикой станка – логическая задача ЧПУ; 3) управление рабочим процессом станка – технологическая задача ЧПУ; 4) взаимодействие с окружающей производственной средой – терминальная задача ЧПУ.
Последняя проявляется через диалог с оператором и информационным обменом с управляющей ЭВМ более высокого уровня. Исторически геометрическая задача ЧПУ возникла первой и у ранних устройств была по сути единственной. Логическая задача ЧПУ явилась следствием автоматизации на станке большого числа вспомогательных простых или циклических операций. Технологическая задача ЧПУ присутствует лишь в тех случаях, когда основной рабочий процесс сам становится объектом управления. Терминальная задача ЧПУ поддерживается устройством ЧПУ как персональным компьютером.