

Обобщенная структура микропроцессорной системы управления.
Провести сравнение аналоговой и цифровой системы управления с точки зрения самого процесса управления (перерегулирование, время переходного процесса).
Провести сравнение по технико-экономическим параметрам аналоговой и цифровой системы управления (стоимость разработки и изготовления, стоимость модернизации изменения алгоритма управления).
Провести сравнение аналоговой и цифровой системы управления по общетехническим характеристикам (масса и габариты, энергопотребление, надежность).
Программируемые логические контроллеры в системах управления. Основные характеристики. Особенности применения.
Персональные компьютеры промышленного назначения в составе систем управления.
Основные требования к ПК.
Микропроцессорные системы управления. Структура. Типы МК.
Структура типового микропроцессора.
Классификация микропроцессорных систем. Архитектура микропроцессора.
Логическая структура микропроцессора.
Типы МК.
Фон-неймановская (принстонская) архитектура. Гарвардская архитектура.
Основные особенности.
Архитектура процессора. Процессоры с CISC и RISC-архитектурой.
Классификация команд.
ARM32 Cortex M3. Основные характеристики.
Отладочная плата 1986EvBrd_64.Назначение и возможности.
HEX-файл. Методика получения. Назначение.
Форматы передачи данных по линиям связи между узлами микропроцессора.
Асинхронная и синхронная передача данных.
Организация прерываний в микро ЭВМ.
Векторное прерывание в контроллере.
Организация прямого доступа к памяти.
Организация памяти в микропроцессорной системе.
Буферная память в микропроцессорной системе.
Организация стековой памяти в микропроцессоре.
Типы адресации памяти в микропроцессоре.
Организация портов ввода-вывода микропроцессорной системы.
Погрешность смещения в АЦП микроконтроллера.
Погрешность усиления в АЦП микроконтроллера.
Интегральная нелинейность (ИНЛ) АЦП микроконтроллера.
Дифференциальная нелинейность (ДНЛ) АЦП микроконтроллера.
Этапы проектирования микропроцессорных систем.
Этапы проектирования микропроцессорных систем.
Принцип регулирования мощности в нагрузке с помощью ШИМ.
Микропроцессоры и микроконтроллеры. Отличительные особенности.
Этапы создания программного обеспечения.
Расскажите об основных характеристиках МП. Емкость памяти. Организация памяти вычислительной системы. Номенклатура запоминающих устройств. Многоуровневая организация памяти. Внутренняя память процессора.
Расскажите об основных характеристиках МП. Производительность МП. Среднее время решения задачи. Отчего зависит производительность МПС.
Расскажите об основных характеристиках МП. Надежность МПС. Виды неисправностей. Время наработки на отказ. Вероятность безотказной работы. Коэффициент готовности. Способы увеличения надежности МПС. Резервирование. Что называется интенсивностью отказов? Каким образом она вычисляется для сложных схем? Каким образом выглядит зависимость вероятности безотказной работы от времени работы системы и интенсивности отказов?
Структура и принципы построения однокристальных МП. Назначение основных блоков и узлов МП. Стандартная архитектура 8-разрядного МП.
Отличительные особенности 8-разрядных МП. Основные характеристики 8-разрядных МП.
Отличительные особенности 16-разрядных МП. Стандартная архитектура 16-разрядного МП. Приведите примеры известных Вам 16-разрядных МП.
В чем состоит отличие синхронных и асинхронных систем?
Интерфейсные узлы сопряжения с объектом микропроцессорных систем управления. Назначения и типы.
Отличительные особенности 32-разрядных МП. Стандартная архитектура 32-разрядного МП. Приведите примеры известных Вам 32 - разрядных МП.
Дайте определение команды и микрокоманды.
Дайте определение программы.
Безадресные команды.
Назначение эмуляторов.
Что обеспечивает прямой доступ к памяти (ПДП)?
Микроконтроллеры семейства АRM. (По материалам лаб. работ).
Структура микроконтроллера АRM.
Организация ввода/вывода информации в АRM микроконтроллере.
Типы и организация памяти в АRM микроконтроллере.
Программирование АRM микроконтроллера.
Последовательные интерфейсы АRM микроконтроллера.
Обработка аналоговых сигналов с использование АЦП АRM микроконтроллера.
Обобщенная структура микропроцессорной системы управления.

Рис. 1.1
Сигнал с измерительного элемента (Из.Э) подается на аналого-цифровой преобразователь (АЦП), который осуществляет дискретизацию входного аналогового сигнала x(t) (рисунок 2.2а) по времени, квантование и кодирование выборочных значений сигнала, следующих с периодом дискретизации Т. После дискретизации получается дискретный сигнал Xд(nT) (рисунок 2.2б), где n – номер отсчета.
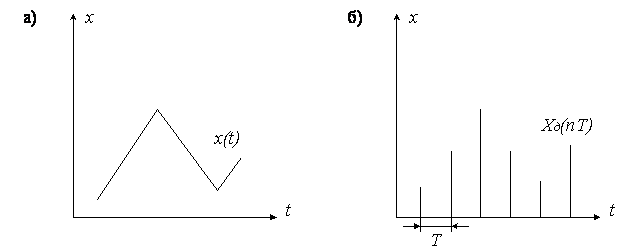
Рисунок 1.2
При кодировании каждое значение Xд(nT) представляется кодом, состоящим из конечного числа двоичных разрядов. Таким образом, на выходе АЦП имеем цифровой сигнал X(nT).
Сигнал с АЦП подается на цифровой фильтр. На выходе цифрового фильтра формируется цифровой сигнал Y(nT).
Преобразование сигналов выполняется в соответствии с алгоритмом.
Y(nT)=A[x(nT)] (1.1)
Алгоритм А является основой синтеза структуры цифрового фильтра.
Цифро-аналоговый преобразователь (ЦАП) и схема сглаживания (СС) служат для преобразования последовательности чисел в выходной аналоговый сигнал, подаваемый на исполнительный элемент (Ис.Э). ЦАП и АЦП являются соответственно выходными и входными узлами для ЦФ. К основным параметрам ЦАП и АЦП относится число двоичных разрядов, которое определяет точность вычислений. Чтобы обеспечить точность преобразования 0,1%, необходимо использовать 10-разрядные АЦП.
Провести сравнение аналоговой и цифровой системы управления с точки зрения самого процесса управления (перерегулирование, время переходного процесса).
Время отклика на возмущение и величина перерегулирования у ЦРВД несравненно меньше, чем у аналоговых возбудителей
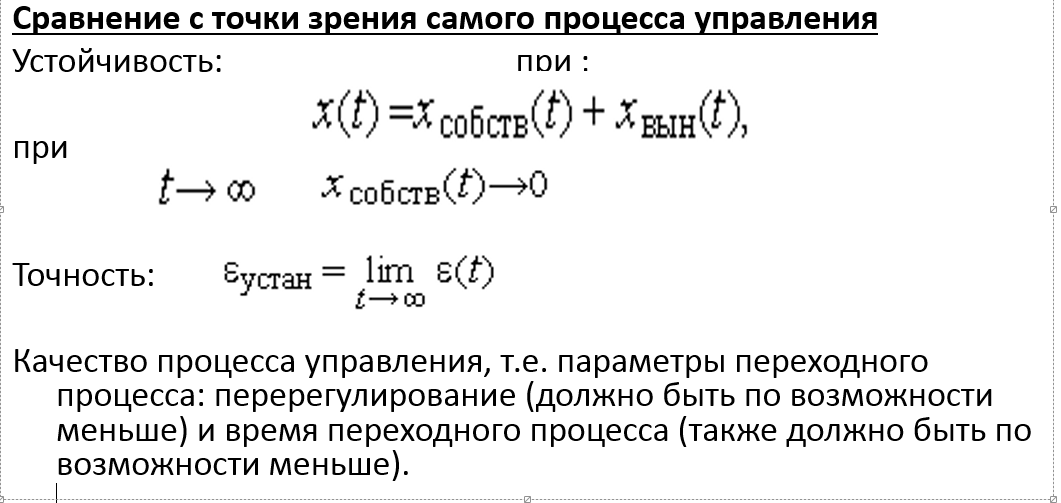
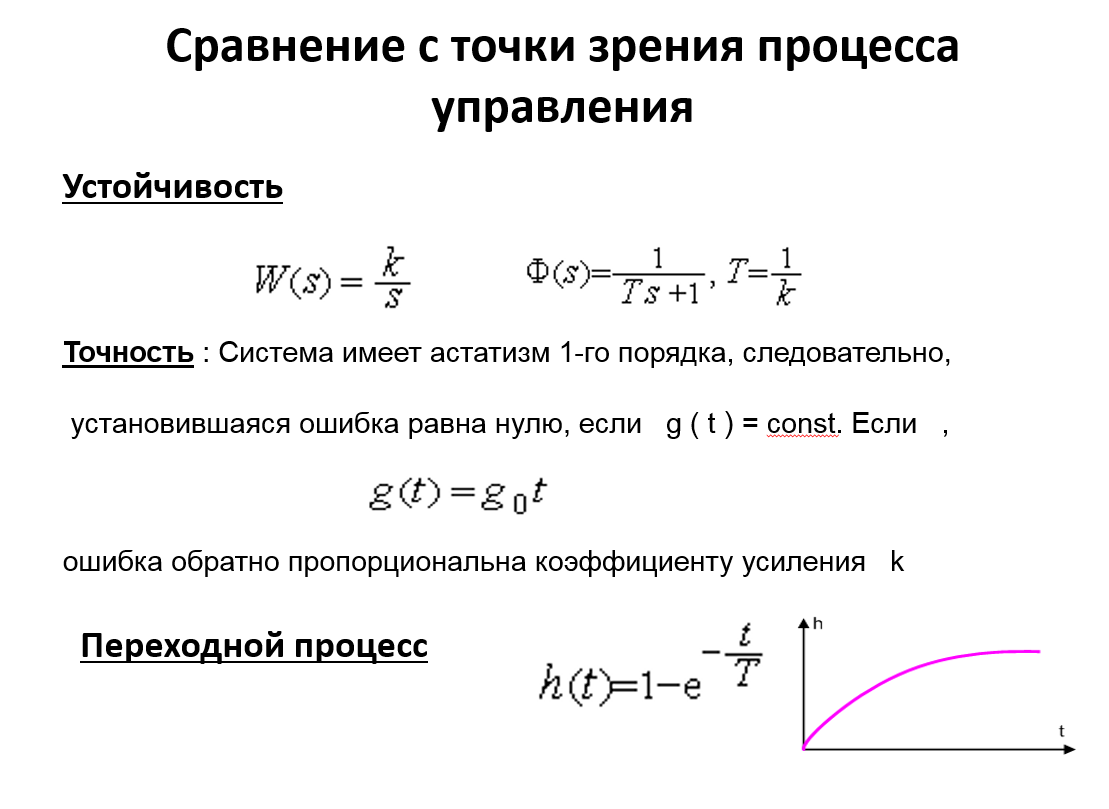
Перерегулирования нет, уменьшая постоянную времени Т мы можем добиться уменьшения времени переходного процесса.
Провести сравнение по технико-экономическим параметрам аналоговой и цифровой системы управления (стоимость разработки и изготовления, стоимость модернизации изменения алгоритма управления).
|
Сравниваемый параметр |
Аналоговые системы управления |
Цифровые системы управления |
Пояснение |
|
- разработка электрической схемы и печатной платы |
+ |
+ |
Занимает примерно одинаковое время |
|
- стоимость комплектующих |
+ |
|
Стоимость комплектующих для разработке аналогова управления чаще всего в 2-3 раза меньше |
|
- разработка программного обеспечения |
+ |
|
для аналоговой системы не требуется программное обеспечение |
|
- возможность изменения алгоритма управления |
|
+ |
Для цифровой сау требуется только изменение по, для аналоговой изменение алгоритма управлении возможно в малой степени |
|
-возможность “наращивания“ функционала |
|
+ + |
Имеется возможность добавления периферийных устройств у цифровой сау (индикаторов, дисплеев, клавиатуры, схем управления внешними модулями) |
|
- возможность перенастройки под новый объект управления |
|
+ |
Программно можно изменять коэффициенты управления и перенастраивать цифровое сау на новй объект управления |
Провести сравнение аналоговой и цифровой системы управления по общетехническим характеристикам (масса и габариты, энергопотребление, надежность).
|
Сравниваемый параметр |
Аналоговые системы управления |
Цифровые системы управления |
Пояснение |
|
Масса и габариты |
|
+ |
массогабаритные показатели цифровых систем управления меньше, чем у аналоговых систем того же функционала. Это обусловлено количеством элементов необходимых для построения системы.
|
|
энергопотребление |
+ |
|
При построении сложного алгоритма управления требуется высокопроизводительный микроконтроллер, который может потреблять много электроэнергии |
|
надежность |
|
+ |
в цифровых сау требуется меньше дискретных элементов. Соответственно выше отказоустойчивость. |