

2. Статические характеристики двигателя независимого возбуждения при питании от источника с постоянным выходным напряжением
Двигательный режим. Будем считать, что при нормальной схеме включения двигателя независимого возбуждения (pис. 1) напряжение U питающей сети постоянно и равно номинальному значению. Примем также, что при неизменном токе в обмотке возбуждения магнитный поток остается постоянным независимо от тока якоря, т. е. не будем учитывать реакцию якоря. Если ток возбуждения имеет номинальное значение, то для естественной электромеханической характеристики (рис. 1) можно записать
![]() . (9)
. (9)
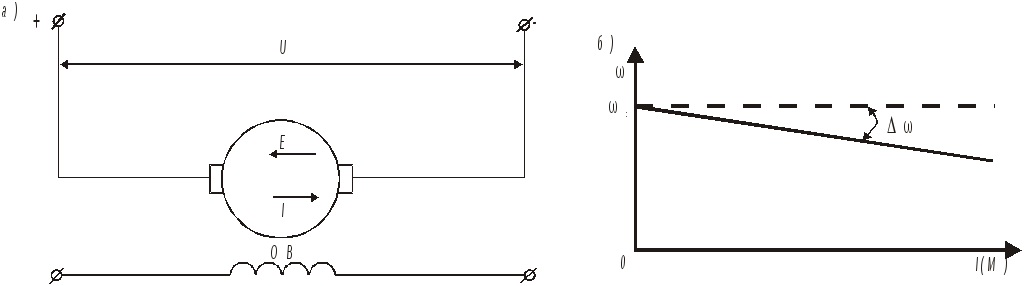
Рисунок 1. Схема включения и естественная характеристика двигателя
независимого возбуждения
Из выражения (9) видно, что при токе якоря, равном нулю, двигатель вращается со скоростью идеального холостого хода, зависящей только от напряжения на зажимах двигателя и от потока возбуждения:
![]() . (10)
. (10)
Из выражений (2) и (10) следует, что при данной скорости противо- э.д.с. двигателя равна приложенному напряжению, так как
Е = 0сФн =Uн.
С учетом (10) уравнение электромеханической характеристики (9) можно представить в следующем виде:
![]() . (11)
. (11)
Тогда согласно (6) выражение для механической характеристики будет
![]() . (12)
. (12)
Величины
![]() для электромеханической и
для электромеханической и![]() для механической
характеристик представляют собой
разность между скоростями
для механической
характеристик представляют собой
разность между скоростями
![]() . (13)
. (13)
Эта разность называется перепадом скорости и обозначается . Тогда для этих характеристик двигателя независимого возбуждения можно записать следующее общее выражение:
= 0 - . (14)
Так как перепад скорости прямо пропорционален моменту или току, то механическая и электромеханическая характеристики двигателя независимого возбуждения являются прямыми линиями и при соответствующих масштабах по току и моменту изображаются одной прямой (рис. 1, б).
Скорость идеального холостого хода можно определить из отношения
![]() , (15)
, (15)
где Uн, Iн, н – соответственно номинальные значения напряжения, тока и скорости двигателя, которые приводятся в каталогах. Тогда
![]() . (16)
. (16)
Зная скорость 0 и скорость н при номинальной нагрузке Мн, т. е. две точки прямой, можно построить естественную характеристику.
Искусственные характеристики могут быть получены изменением подводимого к двигателю напряжения или потока возбуждения, а реостатные – изменением сопротивления в цепи якоря.
Как видно из приведенных выше зависимостей, при изменении подводимого напряжения меняется только скорость 0, а перепад скорости остается неизменным, поэтому характеристики для различных напряжении будут параллельными (рис. 2).
При изменении потока возбуждения меняются, скорость идеального холостого хода 0 и перепад скорости .
При скорости, равной нулю, электромеханические характеристики (рис. 3) для различных потоков пересекаются в одной точке, соответствующей току короткого замыкания Iк, так как величина тока короткого замыкания Iк = Uн/Rя не зависит от потока возбуждения. Механические характеристики (рис. 3, б) общей точки пересечения не имеют, потому что момент короткого замыкания зависит от величины потока возбуждения Мк = сФIк.
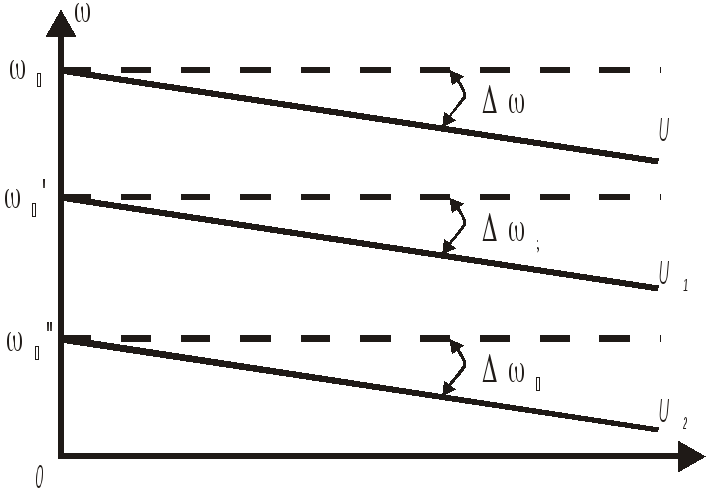
Рисунок 2. Искусственные характеристики двигателя независимого
возбуждения для различных значений напряжении сети
Если включить в цепь якоря добавочное сопротивление, то двигатель будет работать на реостатной характеристике. При нагрузке, равной нулю, все реостатные характеристики имеют общую точку, равную скорости идеального холостого хода (рис. 4).

Рисунок 3. Искусственные характеристики двигателя для различных
величин потоков возбуждения
Выражение реостатной механической характеристики двигателя согласно (12) при номинальном моменте имеет вид
![]() , (17)
, (17)
где R = Rя + Rд, – полное сопротивление цепи якоря, равное сумме внутреннего и внешнего добавочного сопротивлений.
При номинальном токе неподвижного якоря сопротивление якорной цепи должно быть равно номинальному сопротивлению Rн. При этом двигатель развивает номинальный момент Мн, а перепад скорости = 0. Тогда в соответствии с (13):
![]() . (18)
. (18)

Рисунок 4. Естественная и реостатные характеристики двигателя
независимого возбуждения
Разделив (17) на (18), получим
![]() или
= r (19)
или
= r (19)
где = /0 относительный перепад скорости;
r = R/Rн – сопротивление якорной цепи в относительных единицах. Выразим правую и левую части равенства в процентах, тогда
% = R%. (20)
Таким образом, при номинальной нагрузке двигателя на сколько процентов изменится сопротивление при номинальном режиме, на столько же процентов изменится относительная скорость. Это свойство позволяет легко строить реостатные характеристики для любых сопротивлений цепи якоря.
Тормозные режимы. Двигатели независимого возбуждения имеют все три способа электрического торможения.
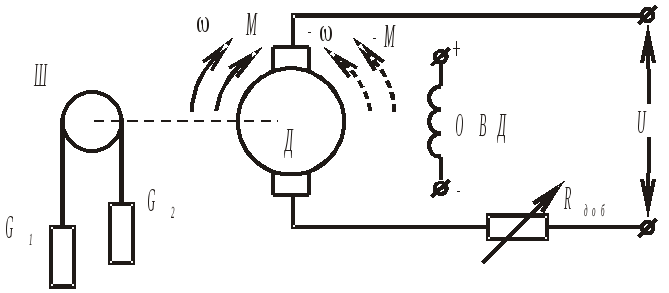
Рассмотрим условия получения этих режимов. Пусть на валу двигателя имеется барабан, на который намотан канат с подвешенными на нем грузами G1 и G2 (рис. 5). Предположим, что груз G1 больше груза G2 и происходит подъем груза G1. Тогда электрический двигатель преодолевает статический момент, созданный разностью грузов, и работает с моментом Мс и скоростью с в точке А своей механической характеристики.
При увеличении груза G2 статический момент на валу двигателя уменьшится, а скорость увеличится. При некотором грузе G2 момент на валу электродвигателя станет равным нулю, а скорость будет равна скорости идеального холостого хода 0 (точка В).
При дальнейшем увеличении груза G2 разность между грузами G1 и G2 будет отрицательной, статический момент M'c, изменит свой знак и начнет действовать в направлении вращения двигателя. Скорость двигателя 'с возрастет и превысит скорость холостого хода (точка С). В этом случае э.д.с. двигателя Е будет больше приложенного напряжения U. Ток меняет свое направление, что следует из уравнения (1), при R = Rя + Rд:
![]() ,
,
следовательно, изменит свой знак и момент, который будет теперь противодействовать движению, т. е. станет тормозным. Электрическая машина в этом случае будет работать генератором, преобразуя механическую энергию привода в электрическую и отдавая ее в сеть. Такой режим называется рекуперативным.
ё ё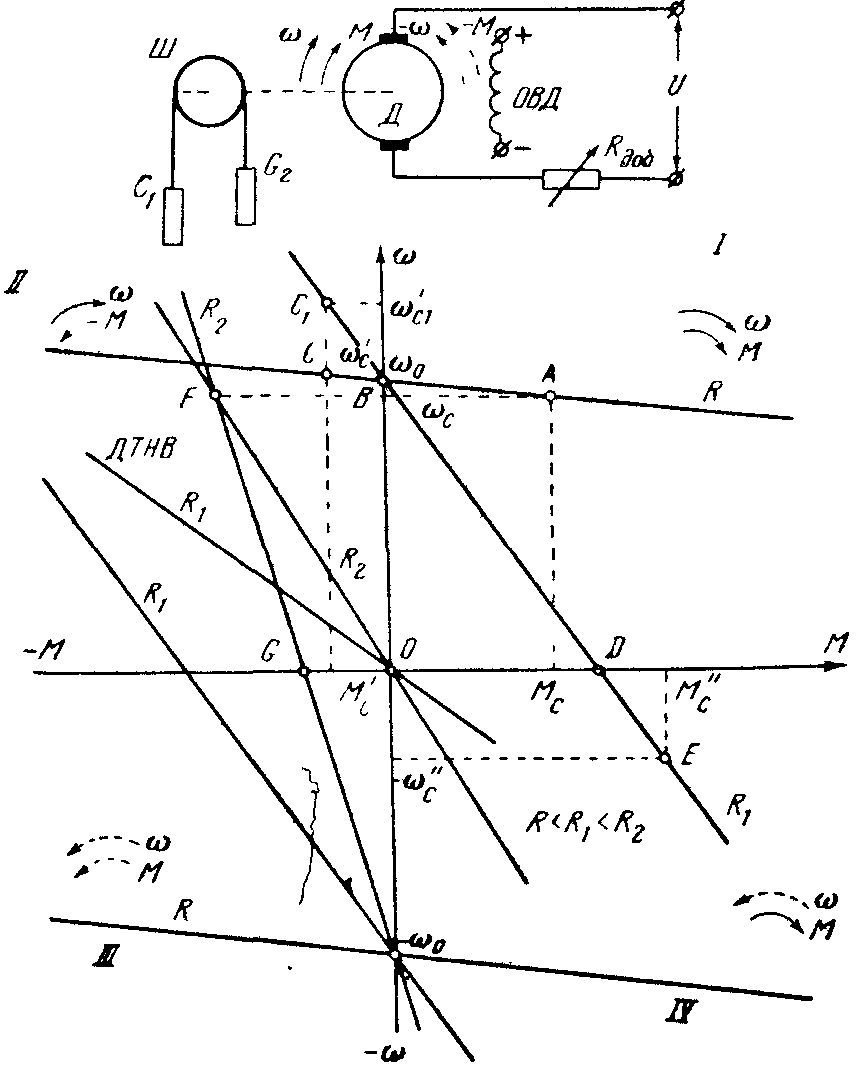
Рисунок 5. Установившиеся режимы работы двигателя:
А – двигательного; В – холостого хода; С – рекуперативного торможения; D, G – короткого замыкания; Е, F – противовключения
Скорость в точке В, расположенной на границе между двигательным и генераторным режимами, называют пограничной.
Уравнение электромеханической характеристики для рекуперативного режима с учетом изменившегося направления тока якоря имеет вид:
![]() , (21)
, (21)
а уравнение механической характеристики для этого режима
![]() . (22)
. (22)
Из полученных уравнений видно, что характеристики двигателя независимого возбуждения в рекуперативном режиме прямолинейны и при М = 0 проходят через точку пограничной скорости. Наклон характеристик определяется величиной сопротивления цепи якоря. Если эти сопротивления для двигательного и рекуперативного режимов равны, характеристики одного режима являются продолжением характеристик другого. Переход работы из одного режима в другой происходит автоматически.
Рекуперативный способ торможения является весьма экономичным, так как происходит отдача в сеть электрической энергии, преобразованной двигателем из механической, приложенной к его валу. Но это торможение может применяться при спуске груза со скоростью выше пограничной. Увеличение сопротивления в цепи якоря при неизменном моменте вызывает возрастание скорости двигателя в рекуперативном режиме (точка С1).
При увеличении груза G1 статический момент будет возрастать. Двигатель начнет уменьшать свою скорость и при некотором грузе G1 остановится (точка D), удерживая груз неподвижным (режим к.з.). При дальнейшем увеличении груза G1 статический момент окажется больше момента, развиваемого двигателем, вследствие этого груз G1 начнет опускаться, вращая двигатель в направлении, противоположном действию момента двигателя (точка Е). Поэтому момент, развиваемый двигателем, будет препятствовать движению привода. Следовательно, он станет тормозным. Такой режим называется противовключением.
Так как направление вращения изменилось на обратное, а направление потока возбуждения остается прежним, то э.д.с. меняет свой знак и будет совпадать с напряжением сети. Ток определится равенством
![]() . (23)
. (23)
Уравнение электромеханической характеристики для режима противовключения будет
![]() . (24)
. (24)
а уравнение механической характеристики
![]() . (25)
. (25)
Из этих уравнений следует, что характеристики в режиме противовключения прямолинейны и являются продолжением характеристик двигательного режима. С увеличением скорости ток и тормозной момент двигателя будут возрастать. Поэтому для ограничения тока и момента допустимыми значениями необходимо в цепь якоря включить дополнительное сопротивление.
Из выражения (23) следует
IяR = U + E.
Умножив левую и правую части на Iя получим
Iя2R = UIя + EIя.
где Iя2R – мощность, расходуемая на нагревание сопротивлений цепи якоря;
UIя – мощность, подводимая со стороны сети;
EIя – мощность, преобразованная из механической, подводимой со стороны вала.
Таким образом, при торможении противовключением двигатель работает не только в генераторном режиме, преобразуя механическую энергию в электрическую, но и потребляет электрическую энергию из сети. Вся эта энергия рассеивается в виде тепла в сопротивлениях цепи якоря. Этот режим может быть использован для остановки привода, работающего с полной скоростью. Для этого изменяют направление вращения двигателя и вводят в цепь якоря токоограничивающее сопротивление. Двигатель в этом случае имеет характеристику, соответствующую сопротивлению R2 (см. рис. 5), а в начале торможения со скоростью с работает в точке F. Так как знак момента М в этом случае изменяется, то под совместным действием его и груза начинается снижение скорости до нуля (точка G).
Если двигатель отключить от сети (он будет вращаться за счет запасенной кинетической энергии привода или энергии опускаемого груза), а обмотку якоря при этом замкнуть на сопротивление, то при наличии потока возбуждения двигатель будет работать генератором, преобразуя механическую энергию в электрическую и расходуя ее в замкнутом контуре, электрически не связанном с сетью. Такой режим работы электрической машины называют динамическим торможением.
Для создания магнитного потока обмотка возбуждения может оставаться включенной в сеть при динамическом торможении с независимым возбуждением (рис. 6, а) или подключаться на зажимы якоря при торможении с самовозбуждением (рис. 6, б).
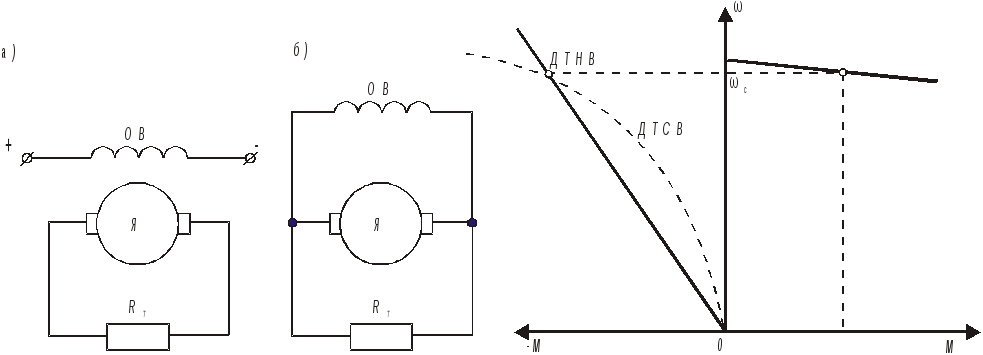
Рисунок 6. Схемы включения и характеристики двигателя с независимым
возбуждением при динамическом торможении
В режиме динамического торможения ток в цепи якоря изменяет свое направление по сравнению с двигательным режимом. Величину его можно определить по формуле
Iя = –E / R.
Уравнение электромеханической характеристики для данного режима будет
![]() , (26)
, (26)
а уравнение механической характеристики
![]() . (27)
. (27)
При динамическом торможении двигателя с независимым возбуждением поток остается постоянным, поэтому тормозные характеристики (см. рис. 5, ДТНВ) представляют собой прямые, проходящие через начало координат, и наклон их к оси абсцисс определяется сопротивлением цепи якоря. Преимуществом динамического торможения с независимым возбуждением следует считать возможность получения большей плавности торможения. Недостатком этого вида торможения является то, что при исчезновении напряжения в сети исчезает магнитный поток и тормозной момент становится практически равным нулю. Во избежание этого применяют динамическое торможение с самовозбуждением. В этом случае обмотка возбуждения подключается на зажимы якоря параллельно с тормозным сопротивлением (рис. 6, б).
Сравнивая характеристики динамического торможения с самовозбуждением и независимым возбуждением (ДТСВ и ДТНВ на рис. 6, б), видим, что при одинаковой скорости тормозной эффект во втором случае больше, чем в первом. Поэтому для двигателей независимого возбуждения динамическое торможение с самовозбуждением применяется редко (только как аварийное).