

ЦСУ_Егоров
.pdfДля информационных систем подготавливаются данные для пред- ставления оперативному персоналу в виде сообщений о технологическом процессе. Для автоматических - вырабатывается управляющее воздействие на объект в соответствии с заданным алгоритмом.
Объект управления и устройство управления образуют замкнутый контур, в котором непрерывно циркулирует информация.
С одной стороны в устройство управления поступает информация о состоянии объекта полученная с помощью датчиков путем измерения па- раметров процесса. С другой стороны, от устройства управления на объект поступает управляющее воздействие, которое с помощью исполнительных устройств изменяет его состояние в соответствии с алгоритмом управле- ния. С пульта оператор наблюдает за работой объекта управления при по- мощи различных средств отображения информации (звуковой и световой сигнализации, мнемосхем, дисплеев) и может вмешиваться в рабочий про- цесс, например при отклонении его от расчетного режима.
Все промежуточные сигналы (аналоговые и дискретные) приводят- ся к параметрам (напряжение, ток, частота) установленным ГОСТами. Дискретные - кодируются в соответствии с заданной системой кодировки.
Если возникает необходимость передачи дискретного сигнала по линиям связи, предназначенной для передачи непрерывных сигналов, дис- кретный сигнал подвергается модуляции. Под модуляцией понимается из- менение, какого либо информационного параметра непрерывного сигнала
всоответствии с кодом дискретного. В приемнике осуществляется опера- ция преобразования непрерывного сигнала в дискретный (демодуляция). Для дальнейшей обработки сигнал необходимо записать в память управ- ляющего контроллера.
При передаче сигнала по линиям связи он может быть искажен наложенными на него помехами. Поэтому в приемнике осуществляется предварительная обработка информации – фильтрация (фильтрация сигна- лов может осуществляться либо с помощью активных фильтров, выпол- ненных на операционных усилителях, либо программно в управляющей машине). Операция масштабирования подразумевает приведение в соот- ветствие значений сигналов и единиц измерения физических явлений, ко- торые эти сигналы отображают.
Для передачи информации от группы источников, сосредоточенных
водном месте к группе получателей, расположенных в другом, часто целе- сообразно использовать только одну линию связи. Линия связи, использу- емая для передачи информации от двух и более источников, называется многоканальной. Каналом называется модель передачи данных от источ- ника к приемнику. Модель характеризуется частотой доступа к линии свя- зи, частотным диапазоном пропускания, типом обмена, направлением об- мена, требованием к обработке ошибок.
Канал связи характеризуется также пропускной способностью - наивысшей скоростью с которой можно передавать информацию в этом
62
канале. Она измеряется в Bd (бодах) – число дискретных состояний сигна- ла в секунду. Так для последовательного канала передачи последователь- ности двоичных сигналов скорость передачи информации измеряется в бит/с.
Канал связи, использующий обычные телефонные линии имеют следующие характеристики: низкоскоростной 0-600 бит/с, среднескорост- ной 600-1200 бит/с, высокоскоростной 4800-9600 бит/с. Полоса частот пропускание сигнала телефонных сетей составляет от 300 Гц до 3400 Гц.
Передача дискретных электрических сигналов по проводным лини- ям связи на большие расстояния затруднена. Любой проводник является инерционным так как имеет реактивное сопротивление. Вследствие этого фронт прямоугольной формы этого сигнала искажается. Поэтому при пе- редаче информации на большие расстояния дискретные сигналы модули- руются-преобразуются в непрерывные. Параметры несущего (непрерывно- го сигнала) выбираются в соответствии с характеристиками линий связи.
В зависимости от того, какой информативный параметр изменяет- ся под действием модулирующего сигнала, различают: частотную, фазо- вую и амплитудную модуляцию. В зависимости от используемых каналов, модемы подразделяются на звуковые (300-9600 бит/с) и широкополосные. Звуковые применяются для передачи данных по выделенным каналам свя- зи либо по коммутируемым телефонным сетям, общего использования. Широкополосные работают на высокоскоростных телефонных, радиоспут- никовых каналах связи.
Операции амплитудной, фазовой и частотной модуляции демон- стрируют примеры, выполненные в пакете Mathcad.
При амплитудной модуляции амплитуда несущего сигнала изменя- ется в зависимости от знака исходного сообщения. Частота несущего сиг- нала в соответствии с теоремой Котельникова должна быть как минимум в два раза выше частоты изменения символов.
63
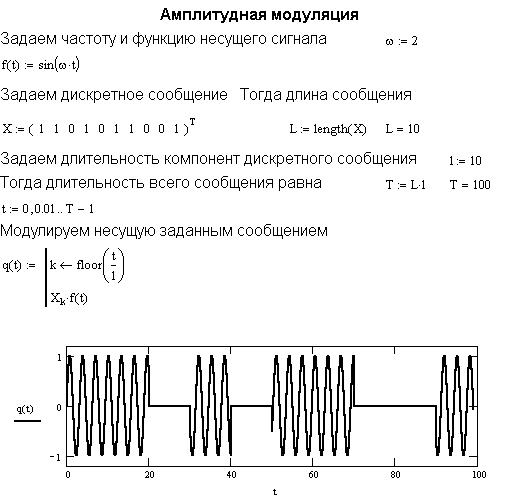
Рисунок 4.4 Амплитудная модуляция
64
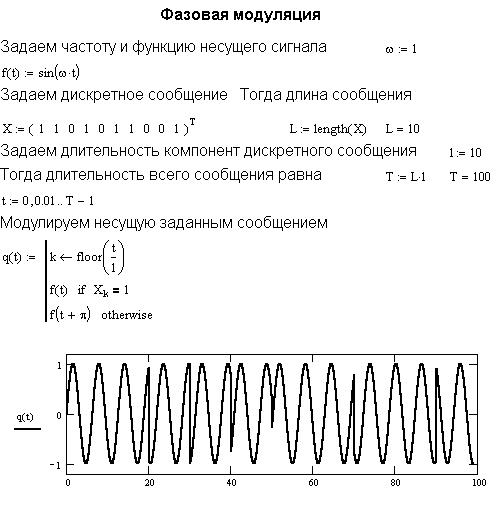
Рисунок 4.5 Фазовая модуляция
В системах передачи информации фазомодулируемыми сигналами реализуется как двоичная так и многопозиционная модуляция. При пере- даче данных фазомодулируемыми сигналами носителем информации явля- ется либо разность фаз сигнала в точках отсчета либо фаза сигнала по от- ношению к фазе немодулированного сигнала.
При частотной модуляции в зависимости от информативного сигнала изменяется частота несущего сигнала.
65
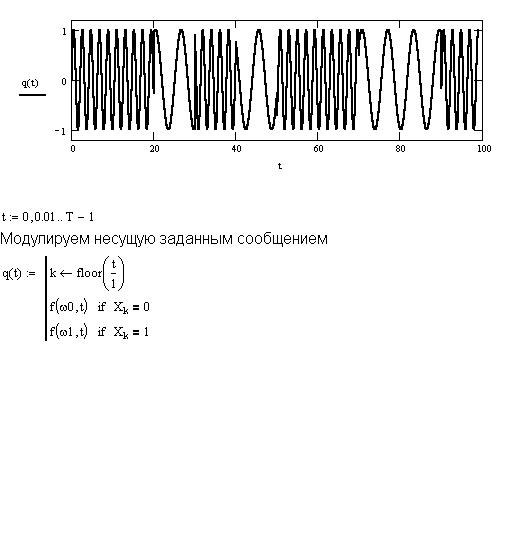
Рисунок 4.6 Частотная модуляция
4.2Методы передачи цифровой информации
Взависимости от направления передачи данных, количества одно- временно передаваемой информации существуют различные методы ее пе- редачи.
При симплексном режиме (рис. 4.6) по каналу передачи данные пе- редаются только в одном направлении, например от датчика к микроЭВМ.
66

Передатчик Приемник
Приемник
Приемник  Передатчик
Передатчик
Рисунок 4.7 Симплексный метод передачи данных
Полудуплексный режим является самым распространенным. Ин- формация передается по каналу в оба направления последовательно с раз- делением во времени (рис. 4.8).
Передатчик |
|
Передатчик |
|
или |
|
Приемник |
|
Приемник |
|
|
|
Рисунок 4.8 Полудуплексный режим
Режим дуплекса характеризуется передачей данных в двух направ- лениях одновременно (рис. 4.9).
Передатчик |
Передатчик |
Приемник |
Приемник |
Рисунок 4.9 Дуплексный режим
Цифровые данные по проводу передаются путем смены текущего напряжения (0-нет напряжения, 1-есть).
Данные можно передавать в параллельном и последовательном ко- де. Параллельная передача характеризуется тем, что группа битов переда- ется одновременно по нескольким проводникам. Каждый бит передается по собственному проводу (рис. 4.10).
67

Передатчик |
|
Приемник |
|
|
|
0 |
|
0 |
|
|
|
1 |
|
1 |
|
|
|
1 |
|
1 |
|
|
|
0 |
|
0 |
|
|
|
1 |
|
1 |
|
|
|
1 |
|
1 |
|
|
|
0 |
|
0 |
|
|
|
Рисунок 4.10 Канал передачи данных в параллельном коде
Например, все внутренние коммуникации компьютера осуществ- ляются с помощью параллельной передачи данных. Это быстрый способ передачи, однако, при больших расстояниях он становится экономически не выгодным, так как требуется большое количество жил кабеля. Вторая причина, по которой параллельный код не используется при передаче на большие расстояния это возможное временное рассогласование передачи отдельных битов в информационном слове.
При последовательной передаче группа битов передается последо- вательно, один за другим по одному проводнику. Она медленнее, но эко- номически более выгодна при передаче на большие расстояния.
Передатчик |
Линия связи |
Приемник |
|
||
|
||
|
|
|
1010100 |
¼¼¼ |
1010100 |
Рисунок 4.11 Последовательная передача данных
Передача данных может осуществляться как в асинхронном, так и в синхронном режимах. При асинхронной передаче каждому байту предше- ствует старт-бит, сигнализирующий приемнику о начале очередной по- сылки, за которой следуют биты данных и, возможно, бит паритета (кон- троля четкости). Завершает посылку стоп-бит, гарантирующий определен- ную выдержку между соседними посылками. Посылка информационных импульсов всегда начинается с посылки стартового импульса (лог. 0) и за- канчивается стоповым импульсом. Если обмен информацией между устройствами в данный момент времени не осуществляется, в линию связи
68
все время посылаются стоповые импульсы. Старт-бит обеспечивает про- стой механизм синхронизации приемника по сигналу от передатчика. Под- разумевается, что приемник и передатчик работают на одной скорости об- мена. Внутренние генераторы синхронизации приемника и передатчика генерируют внутренние стробы, по которым передатчик передает, а при- емник фиксирует принимаемые биты. В идеале эти стробы располагаются в середине битовых интервалов, что обеспечивает возможность приема данных и при некотором рассогласовании скоростей приемника и передат- чика.
Число информационных битов может составлять 5,6,7,8. (Рис 4.12).
|
|
1 |
|
|
1 |
|
1 |
1 |
|
1 Стоп |
|
|
0 |
|
0 |
0 |
|
0 |
|
|
0 |
|
|
Старт
|
Внутренний генератор |
|
Информационная часть |
синхронизирующих |
|
импульсов |
||
|
Рисунок 4.12. Формат асинхронной передачи
Для асинхронного режима принят ряд стандартных скоростей об- мена: минимальная 50 и максимальная 115200 бит/с.
Асинхронный обмен в персональных компьютерах реализуется с помощью СОМ - порта с использованием различных способов передачи электрических сигналов. Например, стандарт RS-232 обеспечивает переда- чу сигналов по линии связи 15 м со скоростью 20 кбит/с.
Синхронный режим передачи предполагает постоянную активность канала связи. Синхронизация приема символов обеспечивается либо внеш- ними синхронизирующими импульсами, либо с использованием самосин- хронизирующего кодирования данных, при которой на приемной стороне из принятого сигнала могут быть выделены импульсы синхронизации.
Всоответствии с принципом последовательной или параллельной передачи данных применяются последовательные каналы и параллельные.
Например, USB (Univtrsal Serial Bus) - универсальный последова- тельный канал – последовательная шина для подключения внешних пери- ферийных устройств, например, клавиатуры, мыши. Двухпроводный ин- терфейс обеспечивает скорость передачи 1,5 или 12 (Мбит/с). Последова- тельная шина IEEE 1934 обеспечивает скорость передачи данных от 100 Мбит/с до 1,6 Гбит/с. Такая скорость передачи позволяет подключать ска- неры, цифровые видеоустройства и т.д.
Вперсональном компьютере используется LРТ (Line Print Ter – по- строчный принтер). Адаптер параллельного интерфейса представляет
69

набор регистров данных, адреса, сигналов состояния и управляющих сиг- налов.
Интерфейс Centroniks работает в синхронном режиме. Данные фиксируются по низкому уровню стробирующего сигнала.
Перечень перечисленных используемых интерфейсов для передачи данных не ограничивается приведенными. Подробно вопросы технической и программной реализации каналов передачи данных рассмотрено в [3].
4.3 Количественная оценка информации
Энтропия как мера степени неопределенности физической системы. Предположим, что необходимо управлять некоторым объектом.
Информация о его состоянии контролируется при помощи цифрового дат- чика, формирующего дискретный цифровой сигнал, имеющий N-уровней. Если считать спектр возможных изменений состояния объекта ограничен- ным частотой f Гц, то в соответствии с теоремой Котельникова можно
определить интервал T > 1 , через который необходимо контролировать
2 f
изменения его параметров. Считая объект случайным можно определить длительность наблюдения Т0 для вычисления вероятностных характери-
стик этого объекта. Количество отсчетов при этом составит n = T0 . Таким
T
образом, зная количество уровней, которые может принимать сигнал, ко- личество отсчетов сигнала, определим число возможных значений сигнала, характеризующих состояние объекта управления
m = N n
Вмомент времени t=0 сведения от объекта управления отсутствуют
иобъект является полностью неопределенным. В момент конца наблюде-
ния Т0 мы получили некоторые сведения об объекте и с заданной вероят- ностью можно говорить о его характеристиках. Неопределенность объекта управления уменьшилась на величину полученной информации.
Если полученная информация раскрывает неопределенность управ- ления до нуля, то неопределенность объекта полностью переходит в полу- ченную информацию.
Возникает задача количественной оценки неопределенности объек- та управления и информации, передаваемой сигналом.
Первая задача связана с определением информационной емкости источника, а вторая с пропускной способностью канала и наиболее рацио- нальном кодировании сообщения.
Может показаться, что мерой количества информации может быть число возможных состояний, которое может принимать объект управле- ния. Но это совсем не так. Как было уже отмечено, объект управления слу- чаен, и нахождение его в том или ином состоянии имеет различные веро-
70
ятности. Знание о состоянии объекта, имеющего большую вероятность де- лает информацию более значимой. Например, подъемный механизм может занимать 10 уровней и вероятность нахождения этого механизма на каком либо уровне равна 1/10. Положение подземного механизма контролируется датчиками. В предельном случае для определения источника механизма необходимо опросить девять датчиков. Однако, если проводятся ремонт- ные работы подъемного механизма, то с вероятностью 1 можно утвер- ждать, что механизм находится на нижнем уровне и достаточно опросить только датчик, контролирующий этот уровень для получения полной ин- формации об этом объекте.
Перейдем к общему случаю. Рассмотрим некоторую систему х, ко- торая может принимать конечное множество состояний х1, х2, … хn с веро- ятностями Prob1 , Prob2, … P rob n . Очевидно, что
n |
(4.1) |
∑Probi = 1 |
|
i =1 |
|
Вкачестве меры априорной неопределенности дискретной системы
втеории информации применяется специальная характеристика, называе- мая энтропией [4]. Энтропией системы называется сума произведений ве- роятностей устойчивых состояний системы на логарифмы этих вероятно- стей, взятых с обратными знаками.
n |
|
H = −∑Probi log(Probi ) |
(4.2) |
i=1
Знак (-) перед суммой поставлен для того, чтобы энтропия была бы положительной. Числа Probi меньше 1 и их логарифмы отрицательны.
Такая запись неопределенности объекта превращает энтропию в 0, когда одно из состояний системы достоверно, а другие невозможны и об- ращается в максимум, когда эти состояния равновероятны и при увеличе- нии число состояний увеличивается. Еще одно важное свойство, энтропия обладает свойством аддитивности, т.е. когда несколько независимых собы- тий соединяются в одну энтропию, складываются.
До получения сведений энтропия системы была 0; после получения сведений состояние системы полностью определилось, энтропия стала равной 1. Обозначим I информацию, получаемую в результате выяснения состояния системы Х.
При получении информации об объекте неопределенность умень- шается, а информация возрастает.
Количество информации, приобретенное при полном выяснении со- стояния некоторой физической системы, равно энтропии этой системы
n |
|
I x = −∑Probi log Probi |
(4.3) |
i = 1
71